Path correction and obstacle detection for 3D printing is an investigation into active robotic correction, between physical data simulated digitally, in real time. The error correction would detect the base as a start point and follow the path of the original geometry, unless an obstacle is detected and the robot would avoid it by moving in the Z axis.
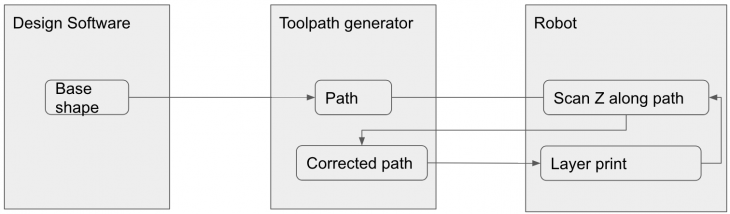
The exact working of the process can be subdivided into three distinct categories Design Software, Toolpath generator and Robot. The initial design creates a tool-path for the clay extruding tool, for every given layer of the extrusion and is updated after the deposition of each layer. After, laying the extrusion for the first tool path from the geometry, a laser moves along the path of the next layer to detect any obstacles. If any obstacle is detected during the robotic scan, a corrected path is replaced into the tool path generator for extrusion. This process of alternating between laser data and printed data creates a real-time correction system.

Printing process with semi circular obstacles
The envisioned process of this experiment can not only be applied, to obstacle recognition for taking into consideration elements such as windows, reinforcement, pipes and tubes, and textures, but also, in printing of unknown surfaces while adhering to the the original design. This process can account for printing errors on previous layers and layer correction.
Students : Filip Bielicki, Sebastian Voigt, Owaze Ansari and Luis Pacheco
