Form Finding Developable Strips with Kangaroo
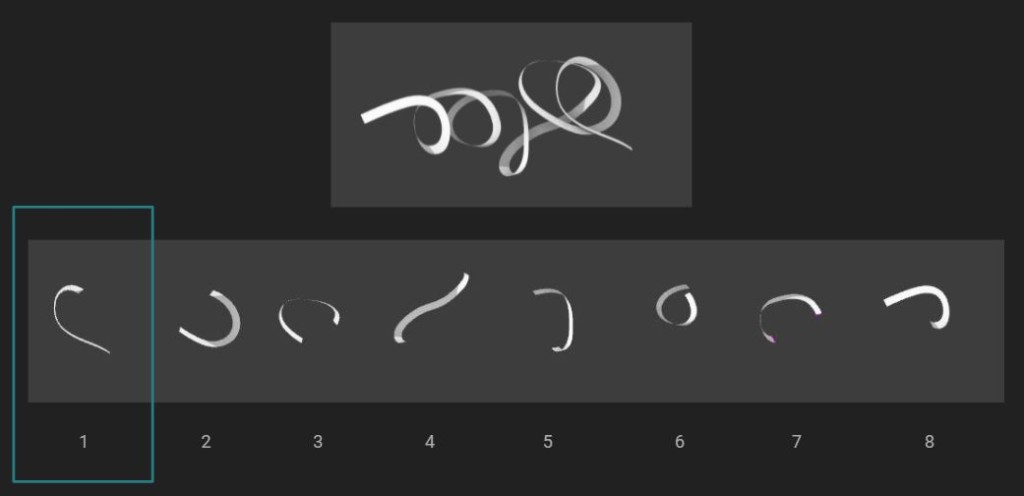
The project aim is to robotically bend a “developable strip” according to a computationally calculated design. A 7m metal strip was designed freehand in Rhino, cut into 8 pieces and distributed to 8 different groups to explore the behavior of the metal strip. Our group explored the first strip.
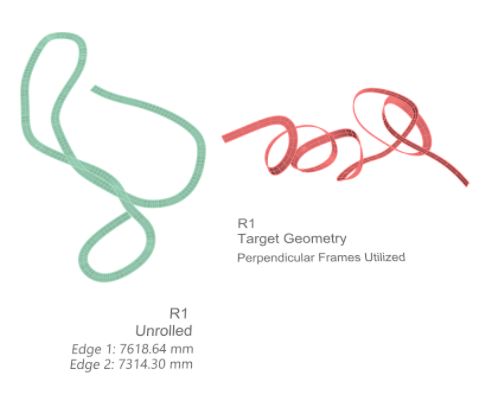
It was identified early on in the process that there was a fundamental flaw with the initial geometry upon which the project was based. Namely, the sweep generated from the initial curve was not, in fact, developable as straight strips. Because perpendicular frames (which “solve the perpendicular (zero-twisting) frame at a specified curve parameter”) of the divided curve were used to generate the sweep, the geometry created has boundary lines which are unequal in length and do not have surface normals consistent to the original curve or the boundary lines at points perpendicular to the original curve.
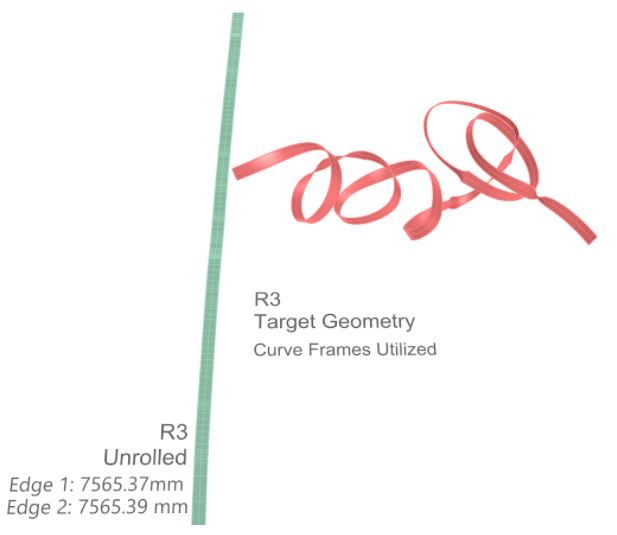
A more appropriate approach would have been to utilize curve frames for the creation of the initial sweep. This grasshopper component would have allowed the curve normal to play a role in the sweep construction and thus generated geometry that can be unrolled into a rectangular plane.

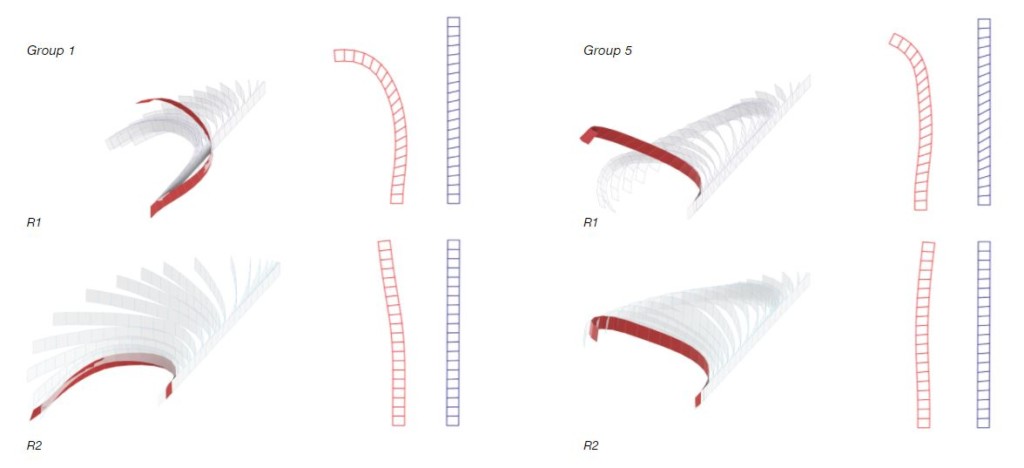
Evolution of each group’s strips according to their “target for kangaroo”, “baked curve from kangaroo” and “the final curve of the robotic simulation”. The first iteration R1 is created by anchoring the target points or curves to achieve the designed curve. The second iteration R2 is created by keeping the strip length stable in order to fabricate the strip. The final form was closer to the target curve.


R1 // forming the curve with the free movement of the mouse
R2 // forming the curve by holding the design curve as constant parameter (anchoring the target points)
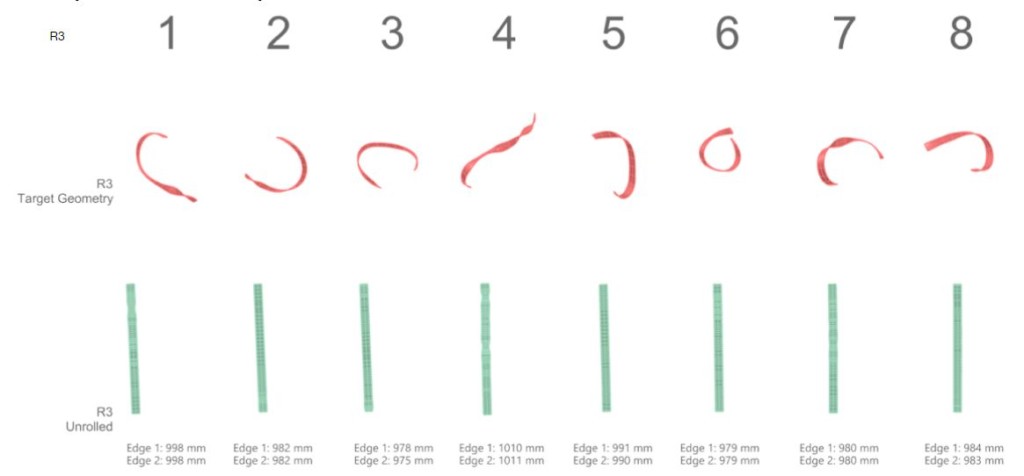
R3 // forming the curve by holding the length as constant parameter
•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••
R1
R2
 R3
R3
Developable Surface vs Strip
Three different kangaroo GH scripts were explored. R1 uses the mouse and plastic anchors on edge points as key parameters to manually deform the strip. R2 aims to imitate the goal surface as close as possible, using every edge point as target anchor with high strength. R3 loosens the strength of the anchor, and raises the strength of maintaining length.
R1 Initial Geometry (Surface lofted via Perpendicular Frames)
R3 Alternative Geometry (Surface lofted via Curve Frames)
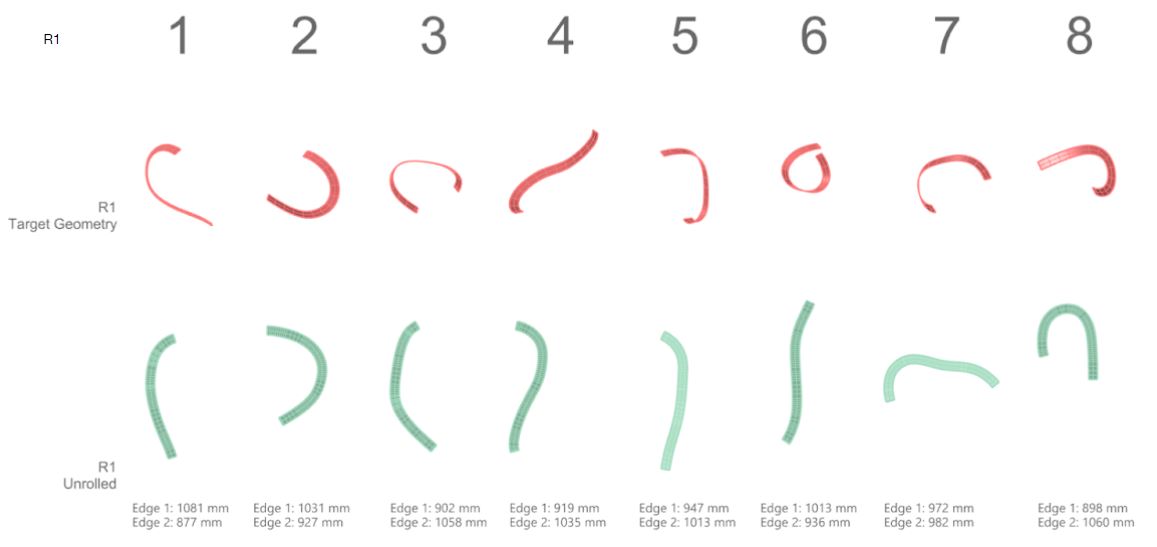
Exploration on Group1, Group5 and Group8’s
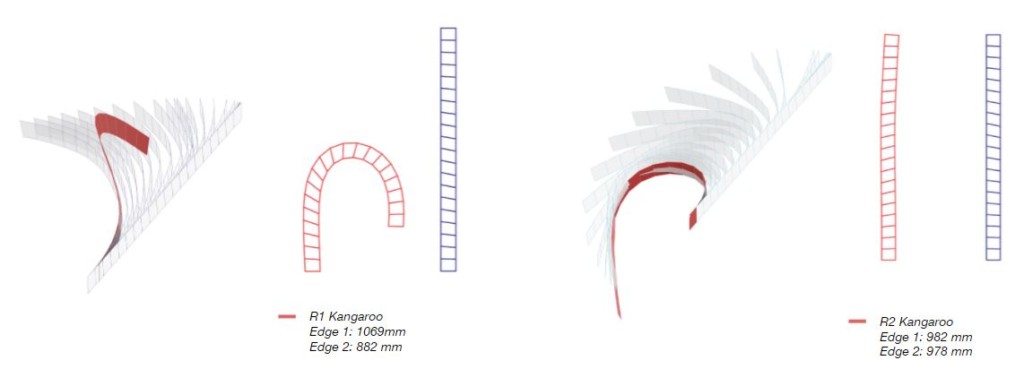
R1-R2 unfolding strip behavior
To design a developable strip, both edges must remain the same length as in the real world (where the bending will occur from a single strip of aluminum).
The ‘maintain length’ parameter in R3 was key in resulting in a developable strip, which could be seen by simply unfolding the surfaces.
Group 1 – Group 5
•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••
Group 8
•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••
Form Finding Developable Strips with Kangaroo is a project of IaaC, Institute for Advanced Architecture of Catalonia
developed at Master in Robotics and Advanced Construction in 2021/22 by:
Students: Yeo Jeong Kim, Robert Michael Blackburn, Beril Serbes
Faculty: Efilena Baseta, Marielena Papandreou