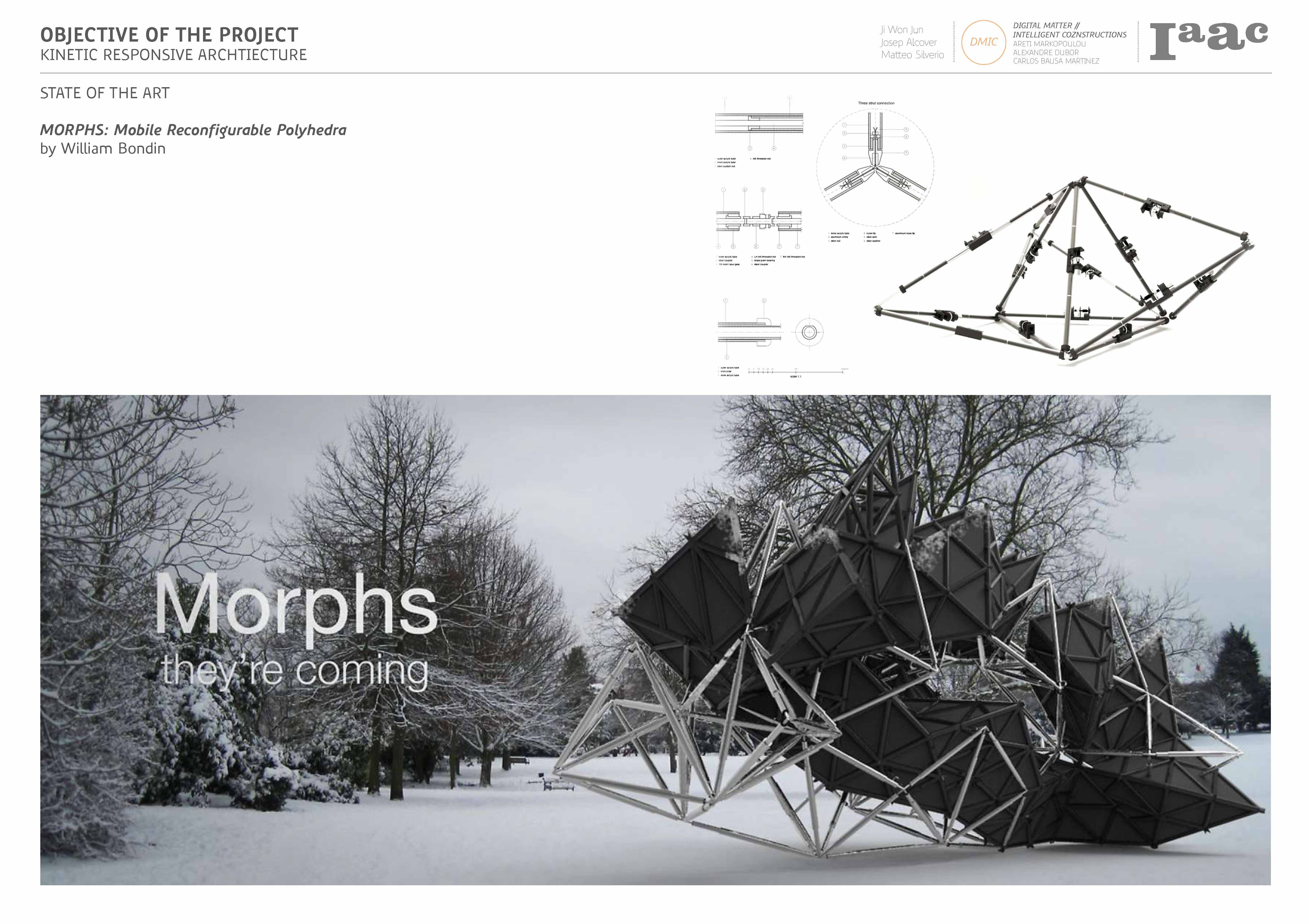
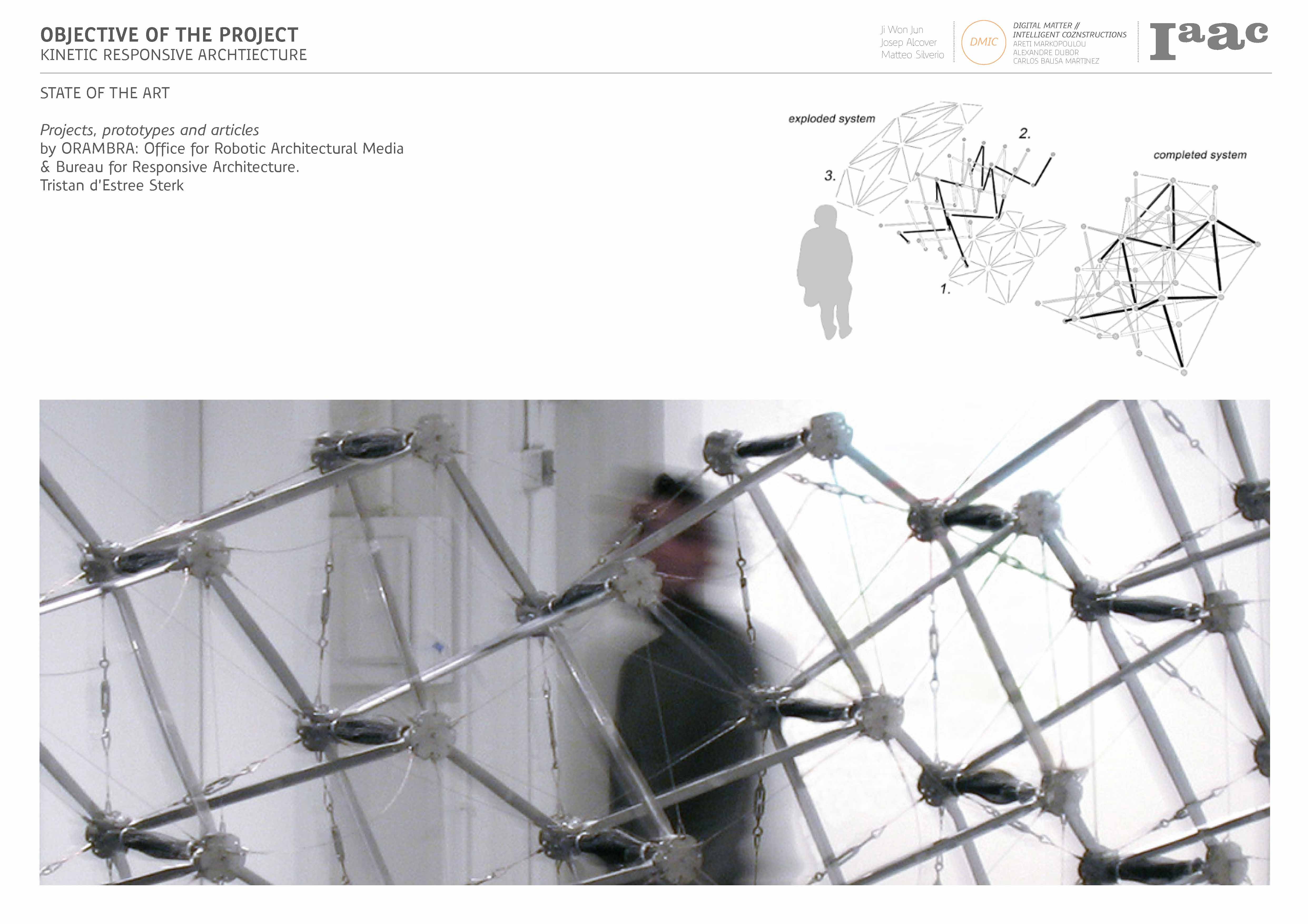
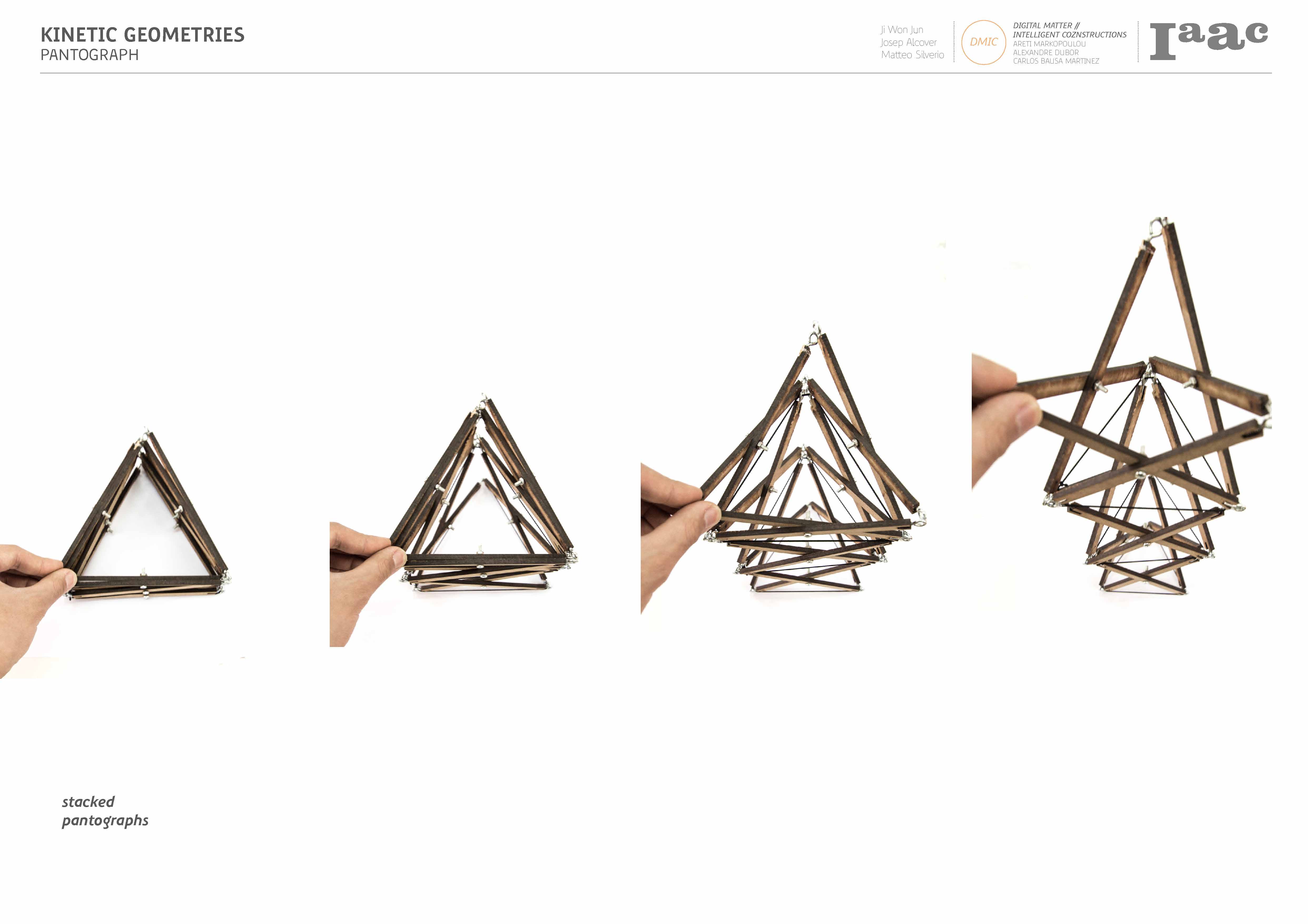
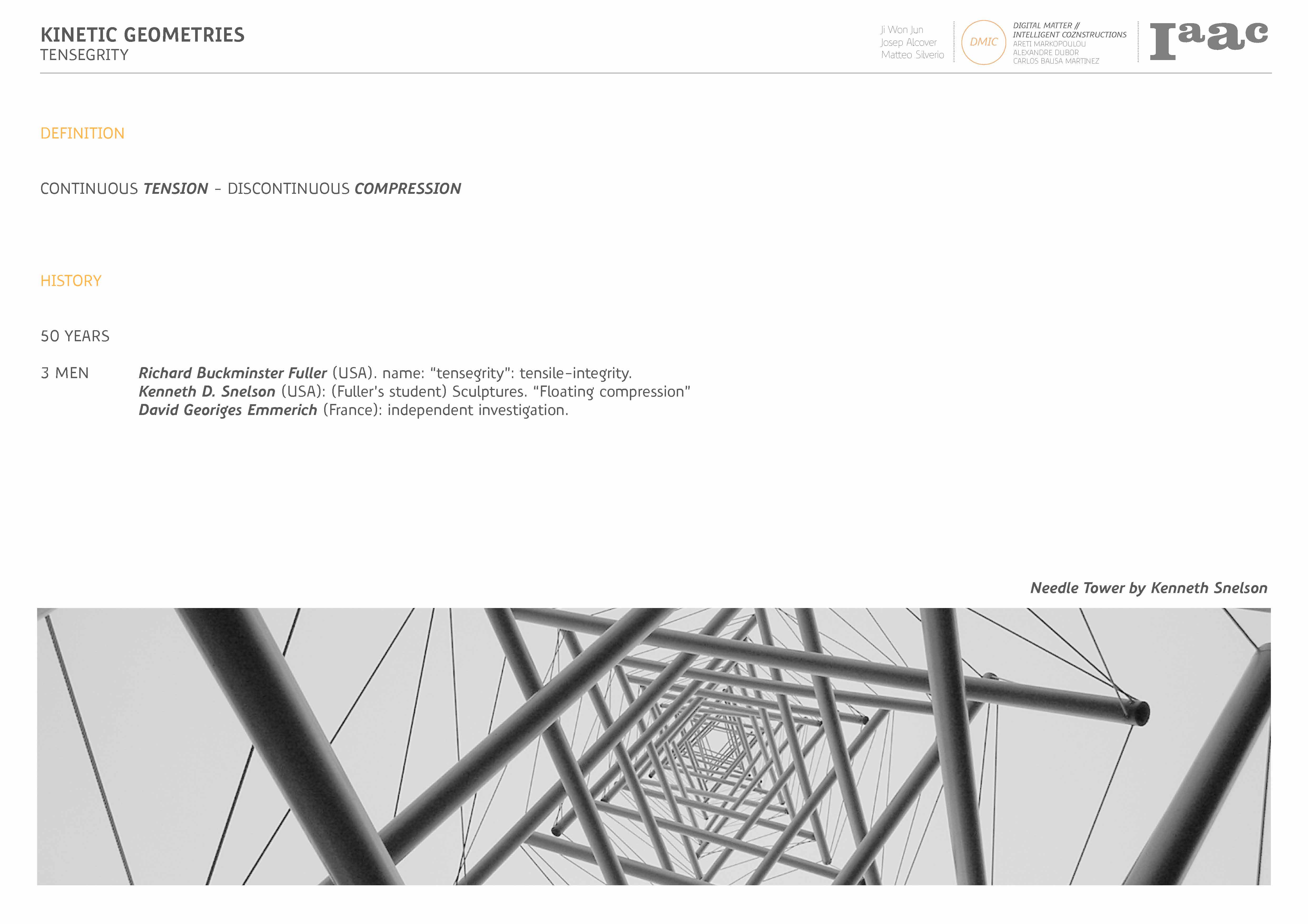
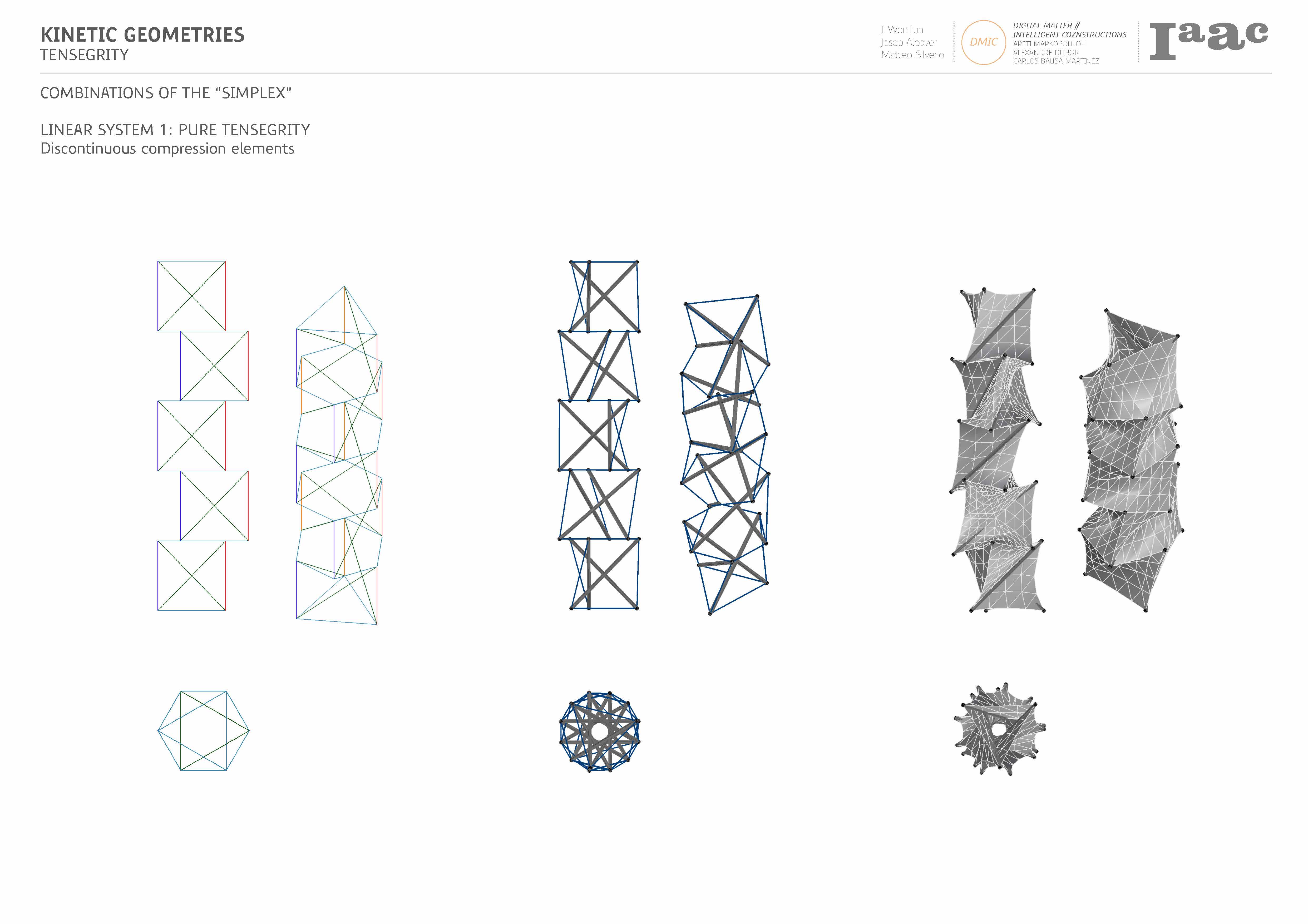
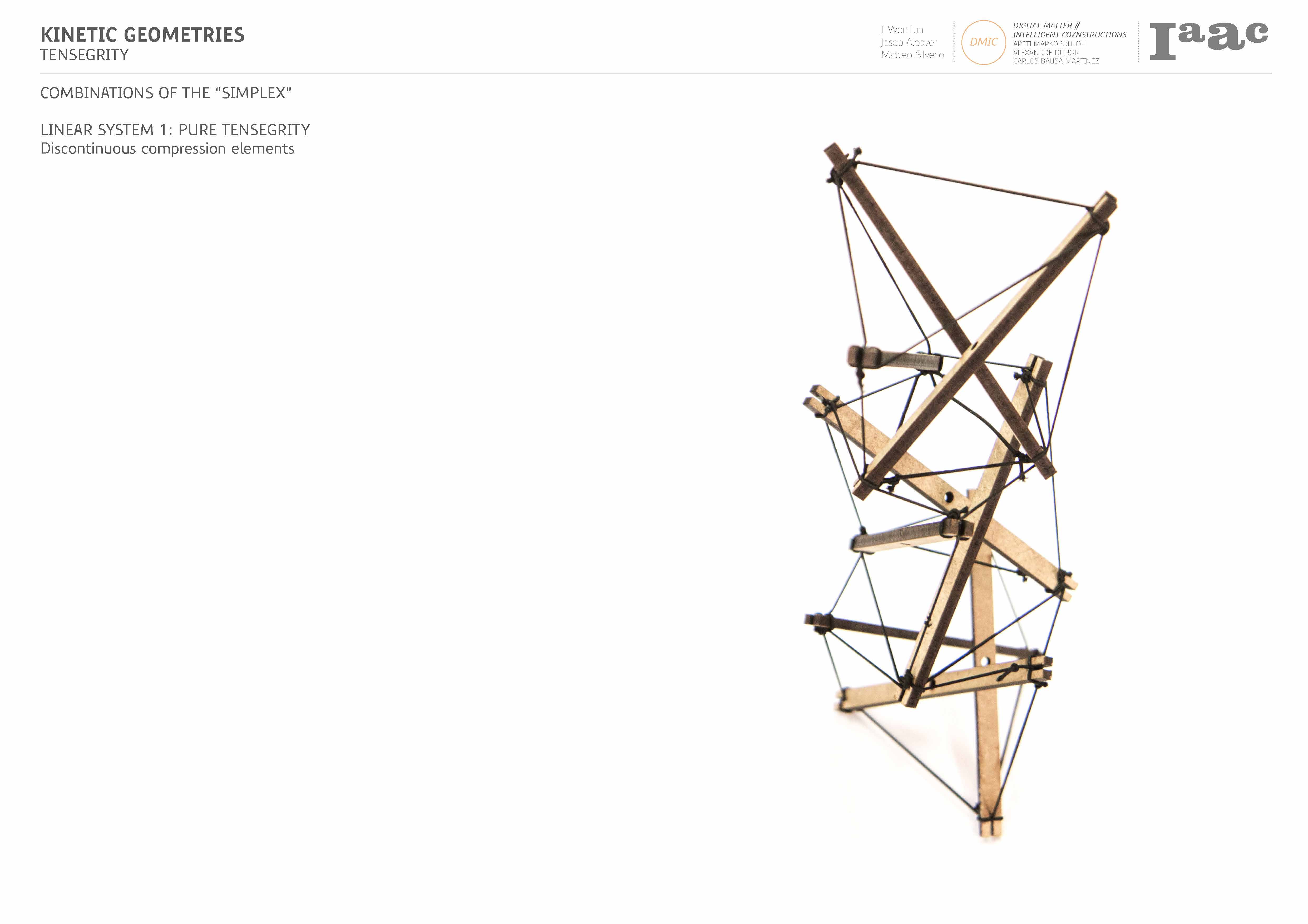
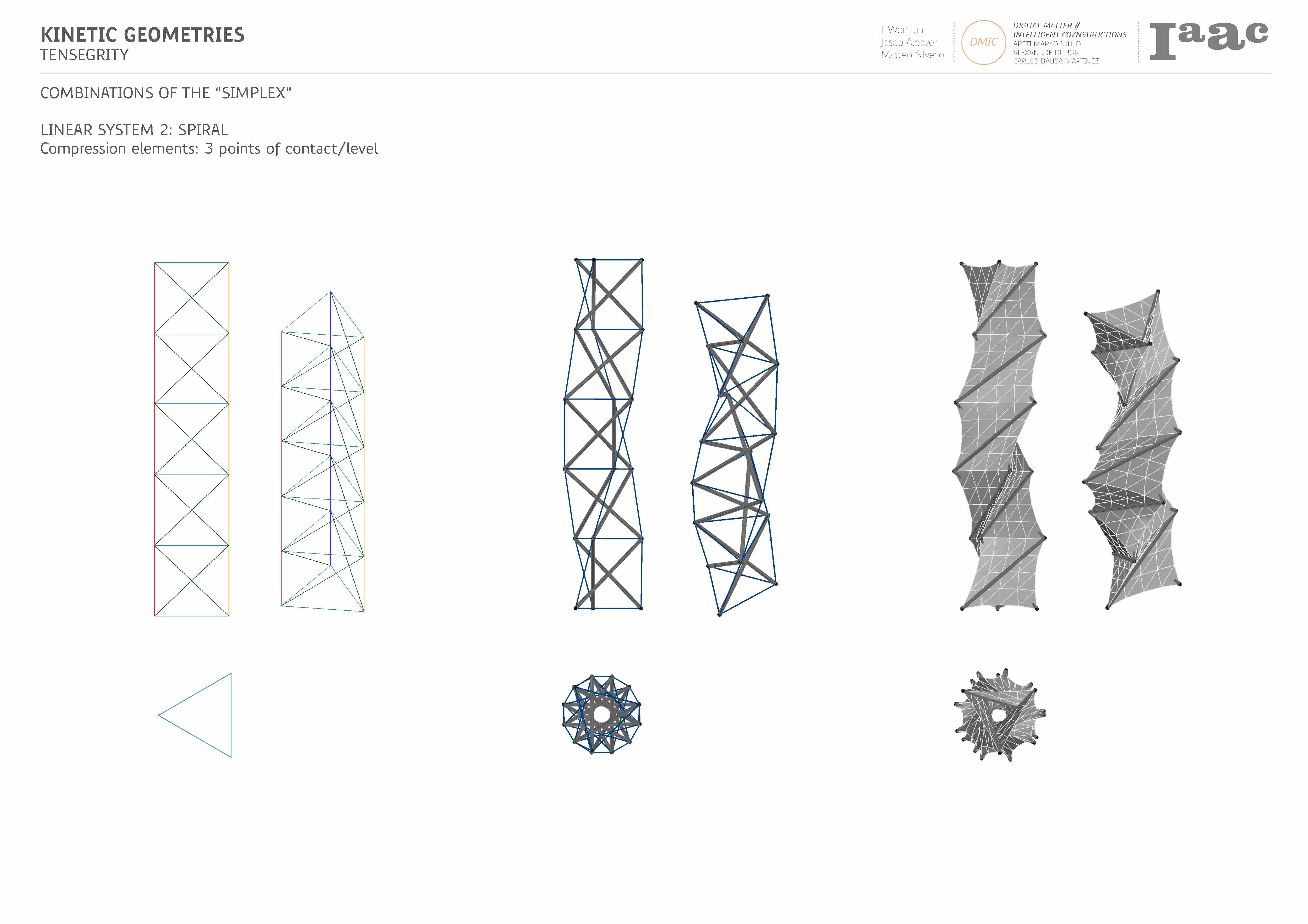
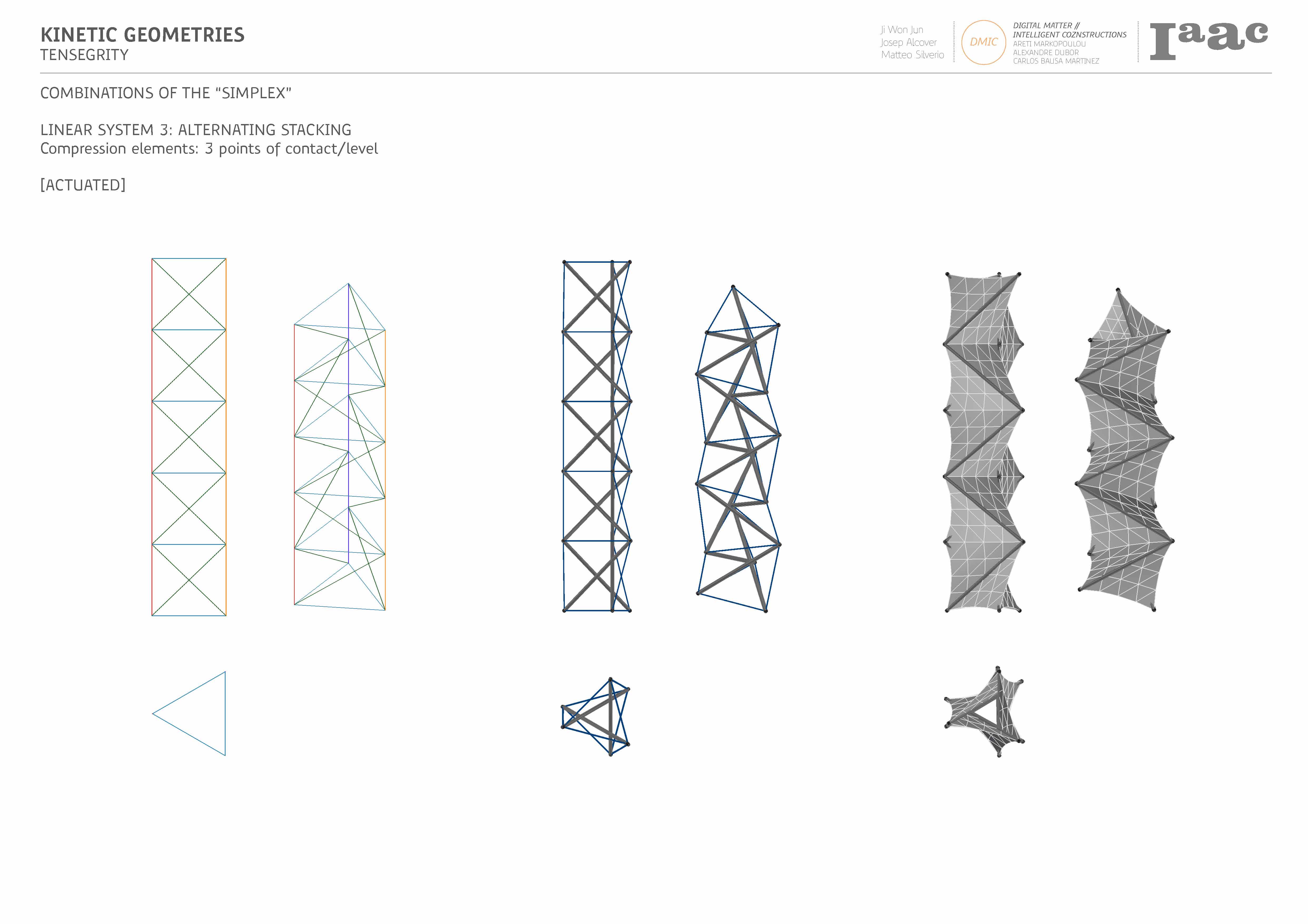
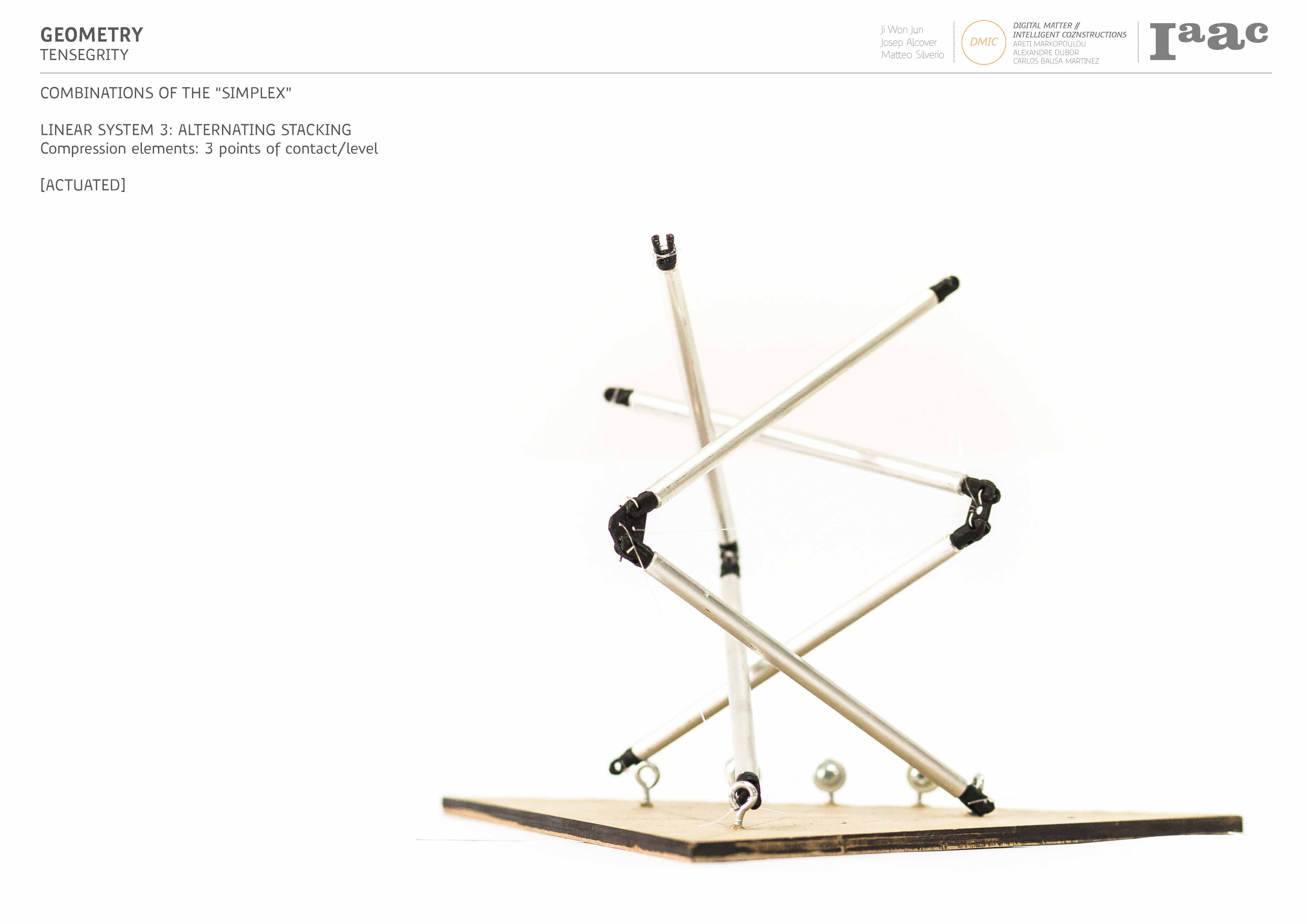
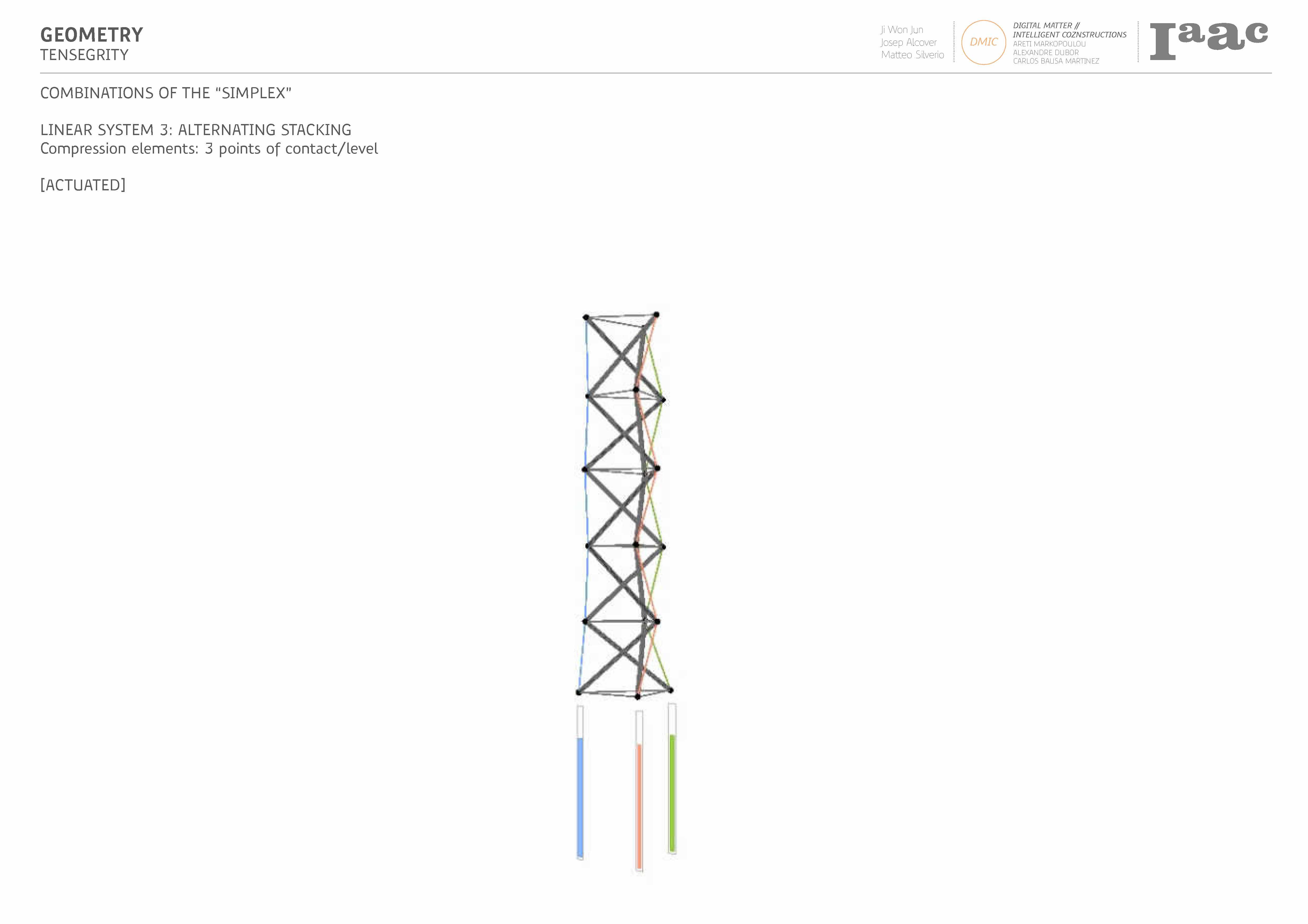
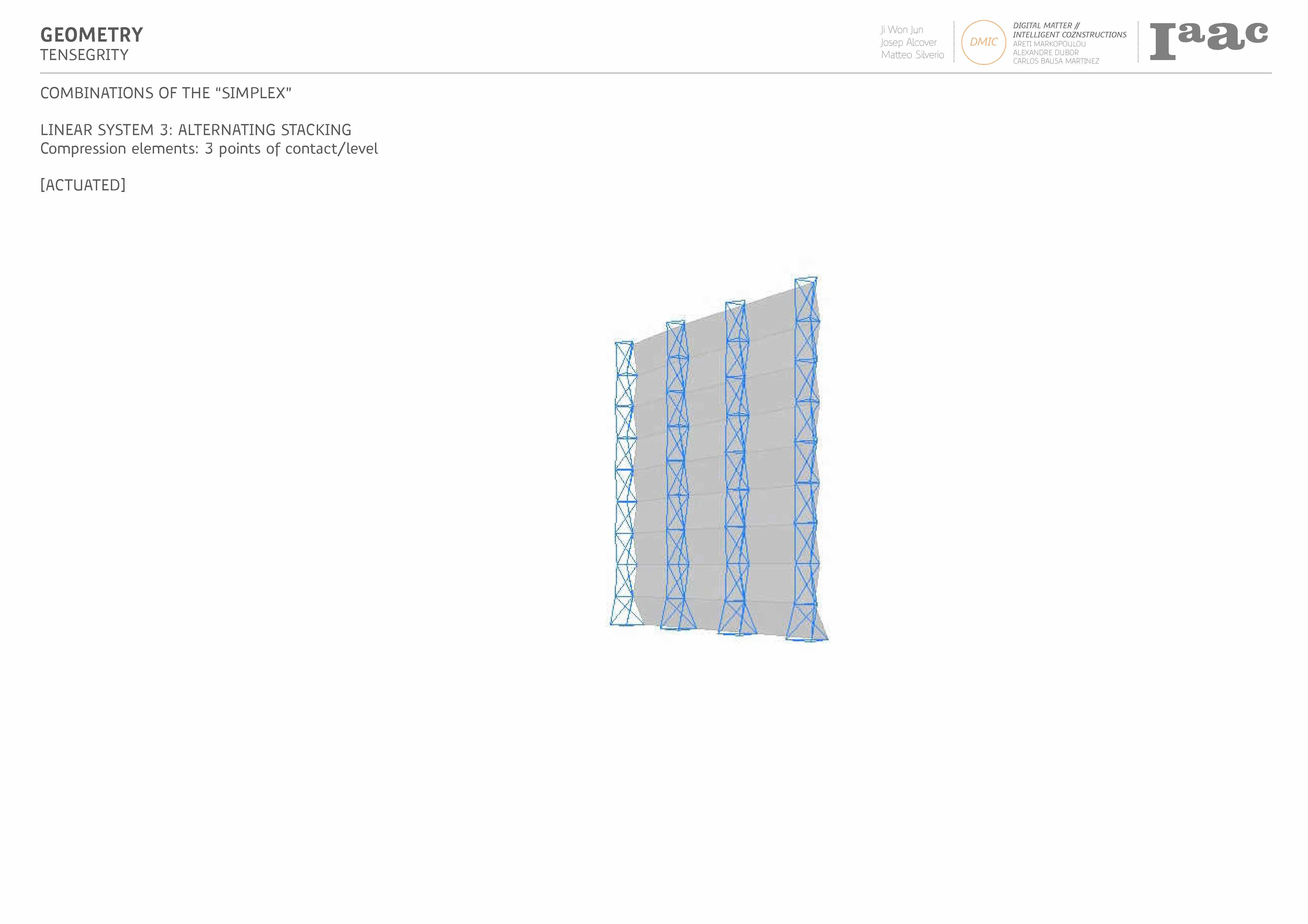
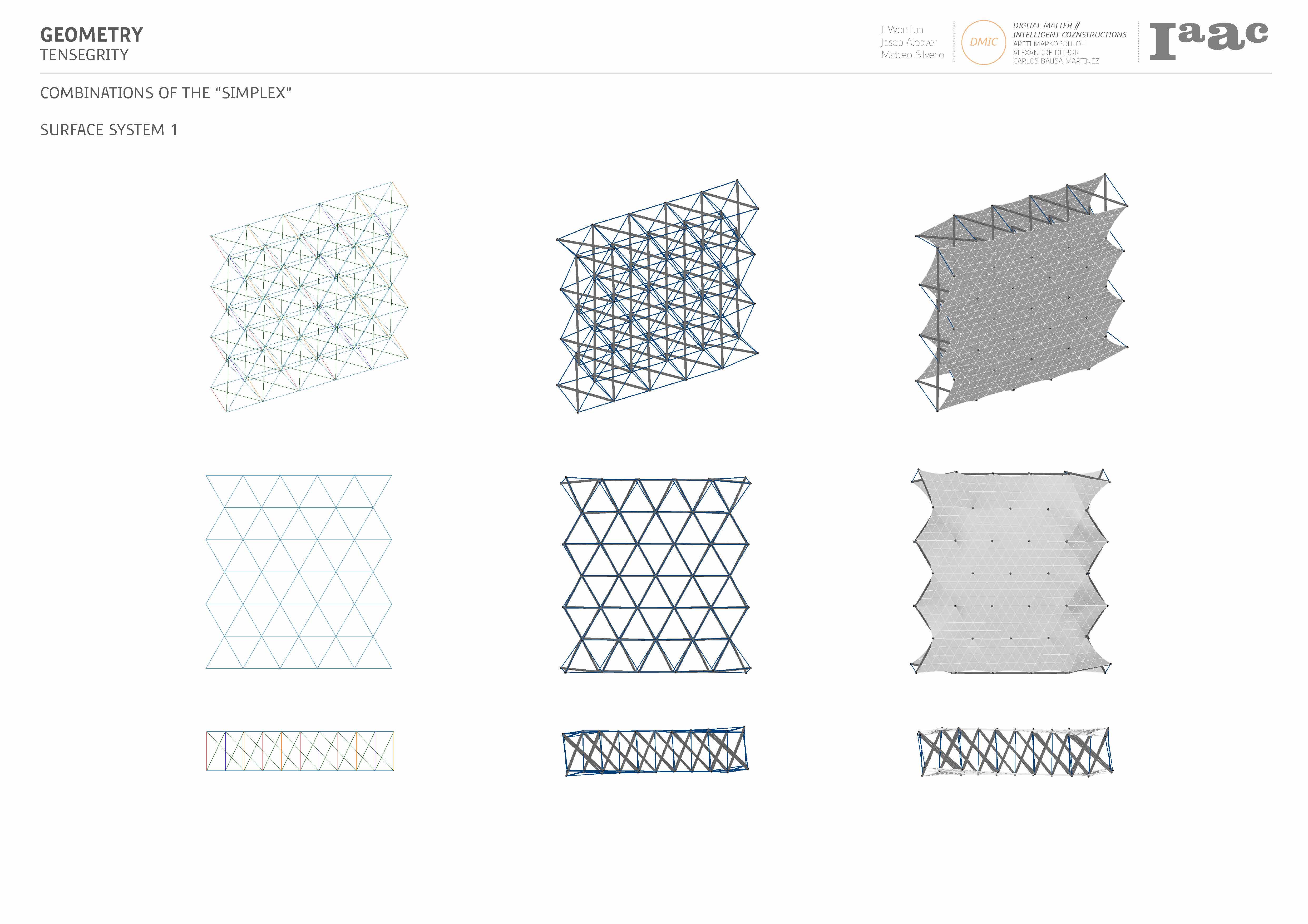
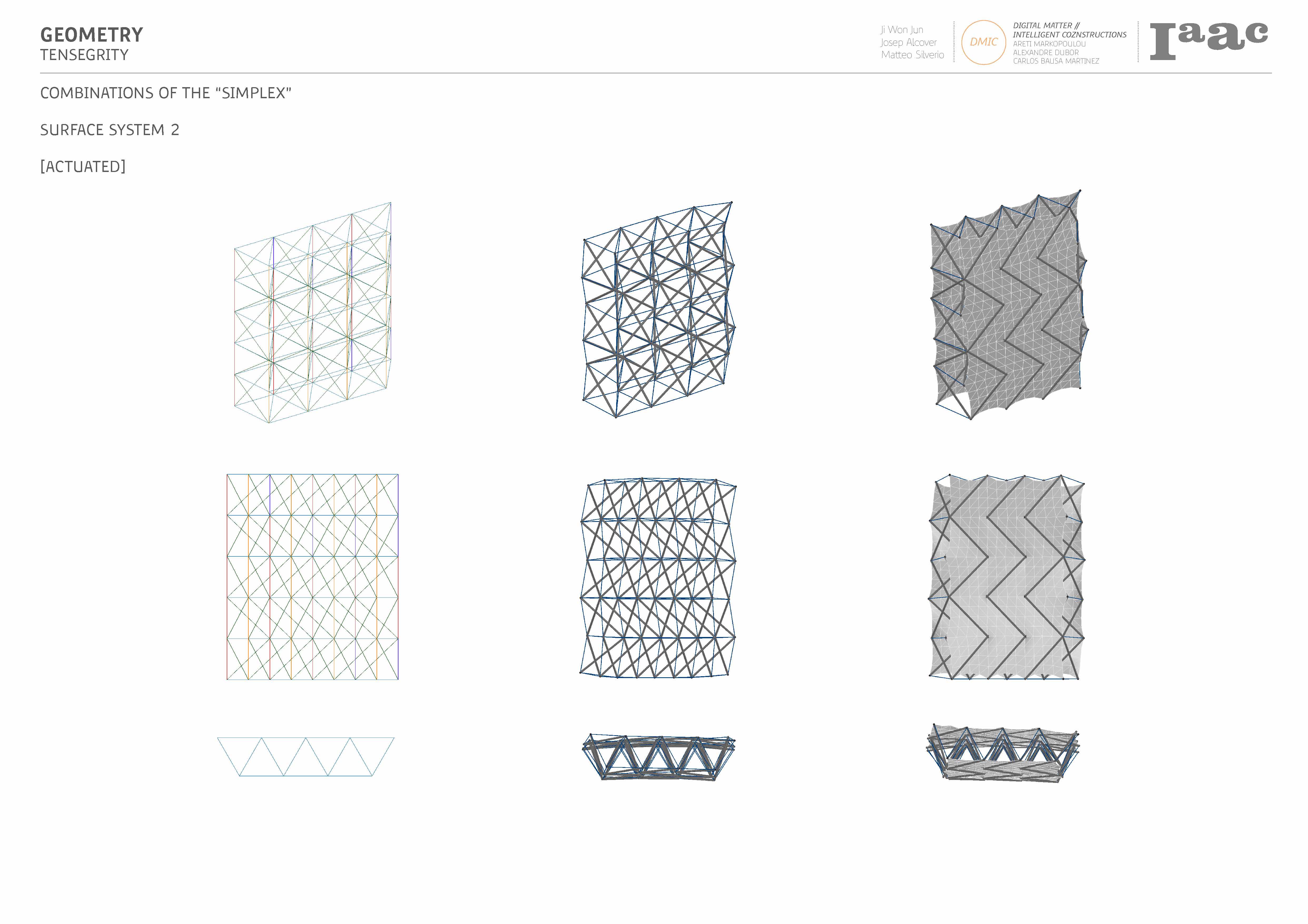
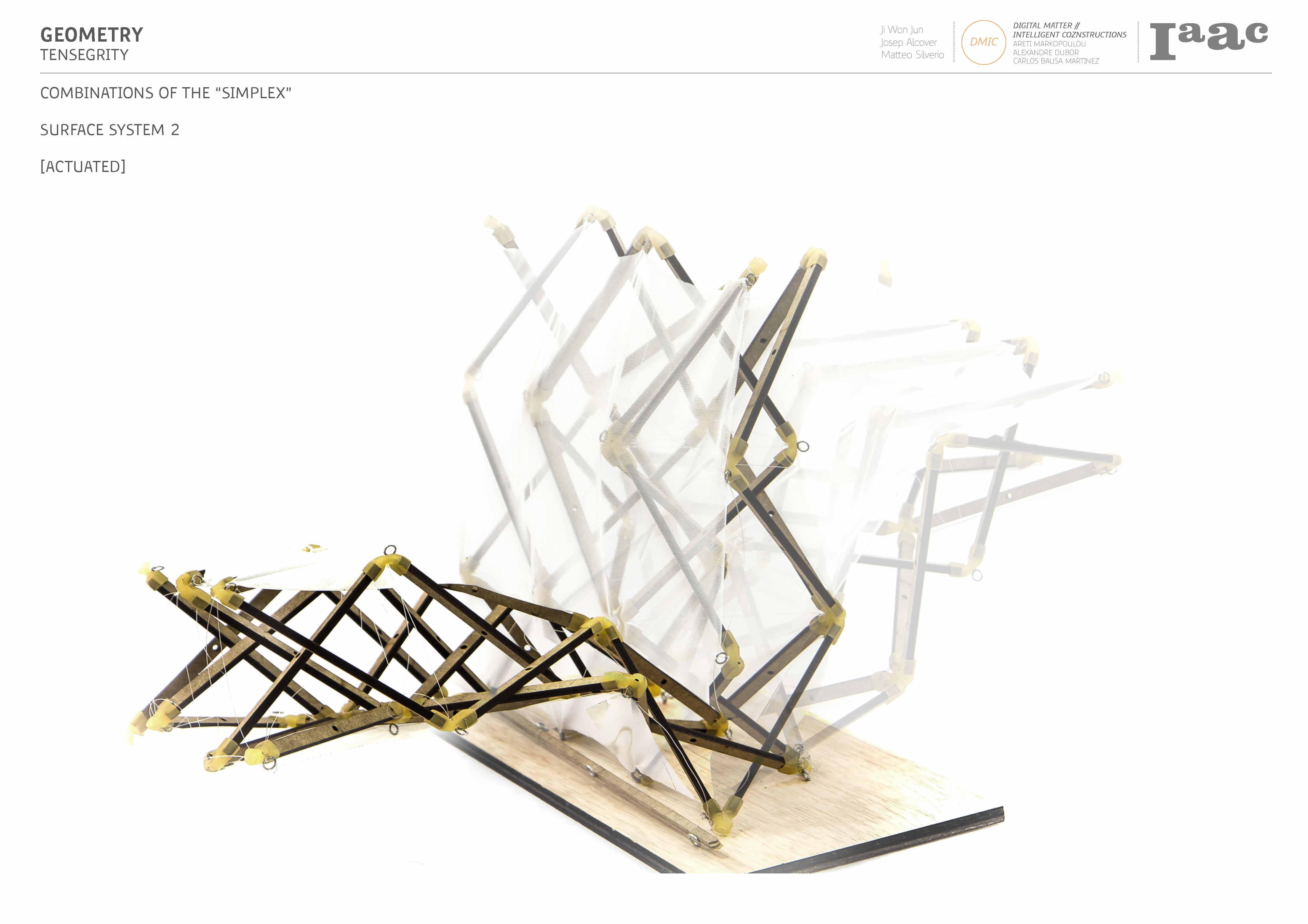
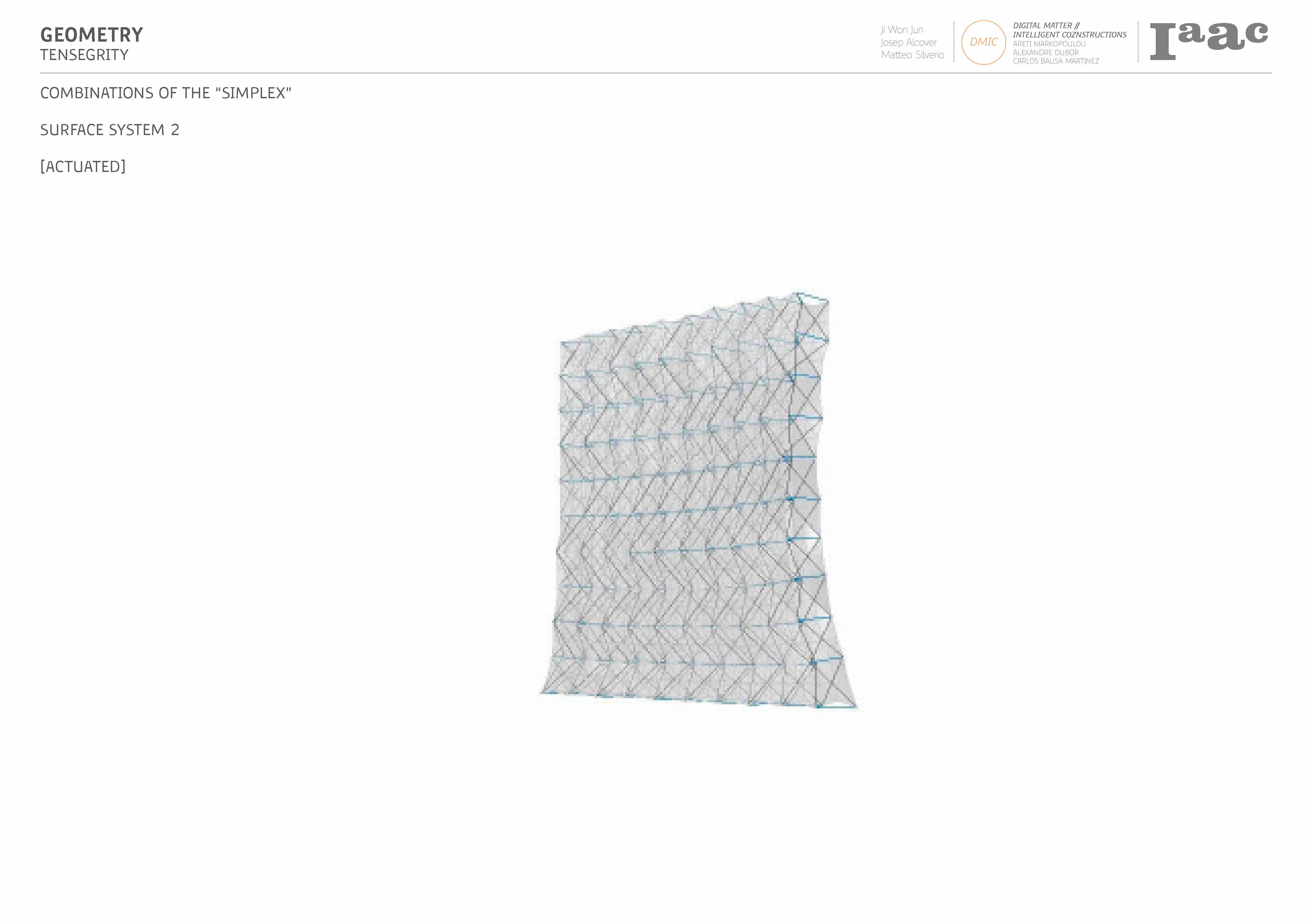
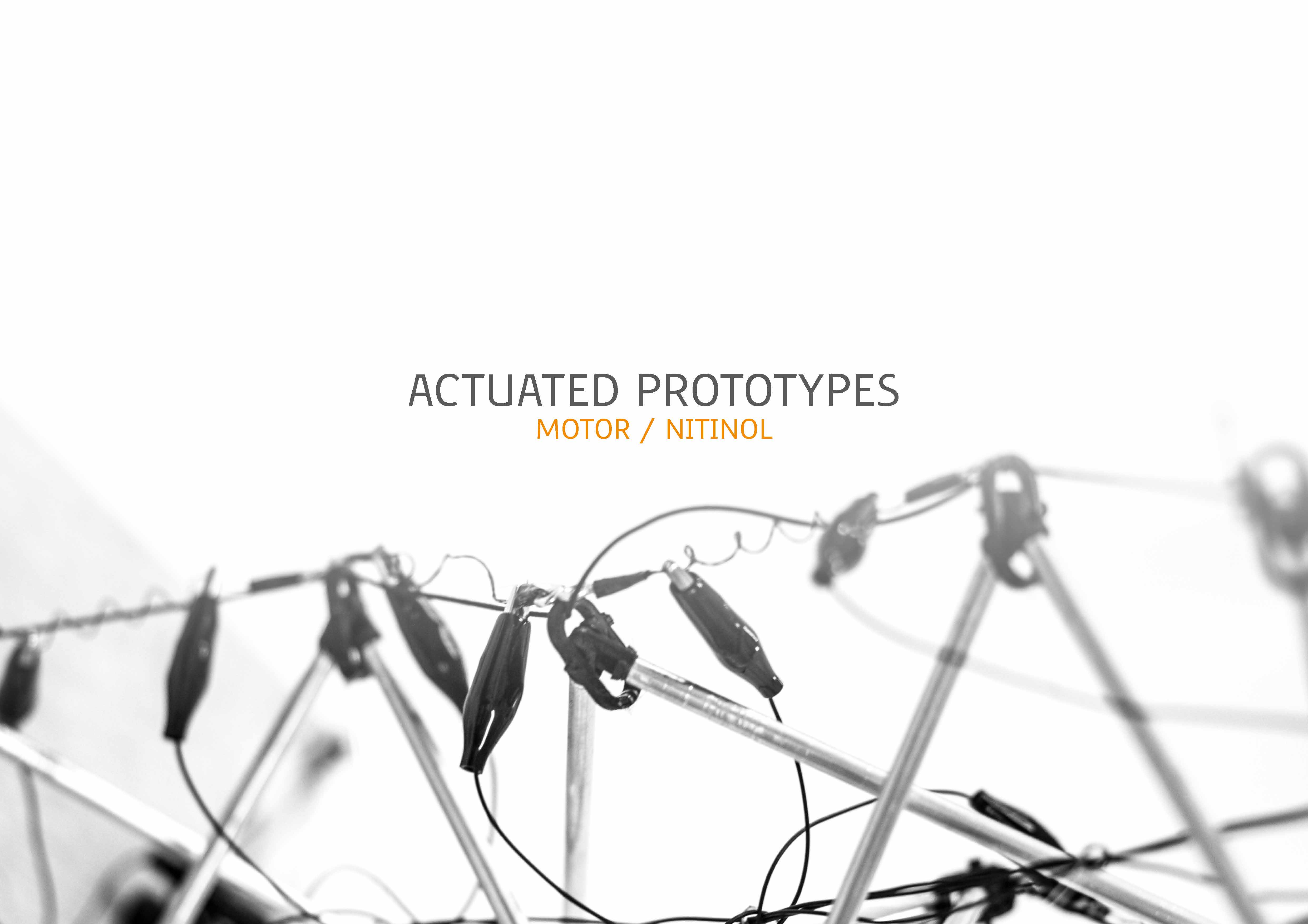
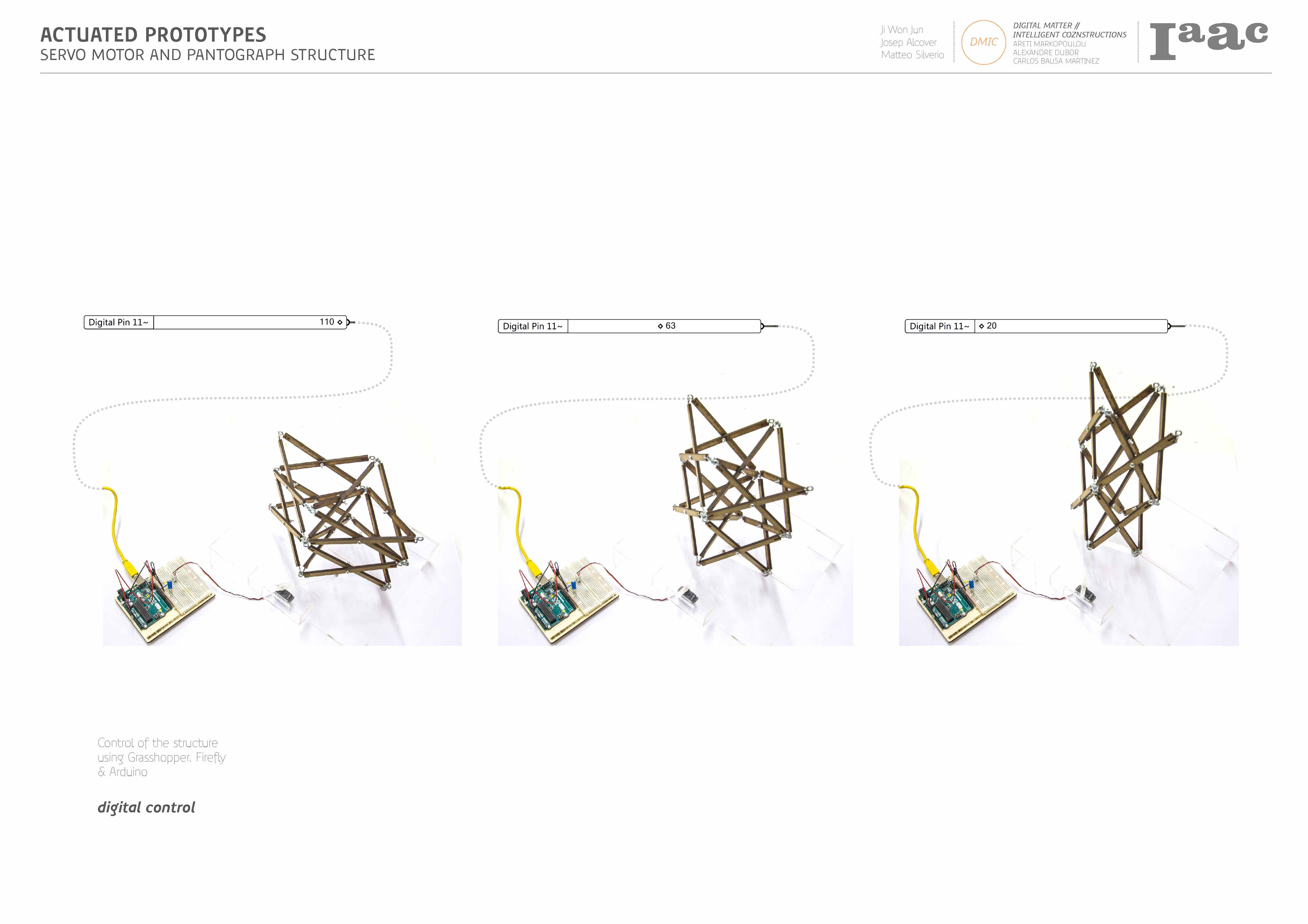
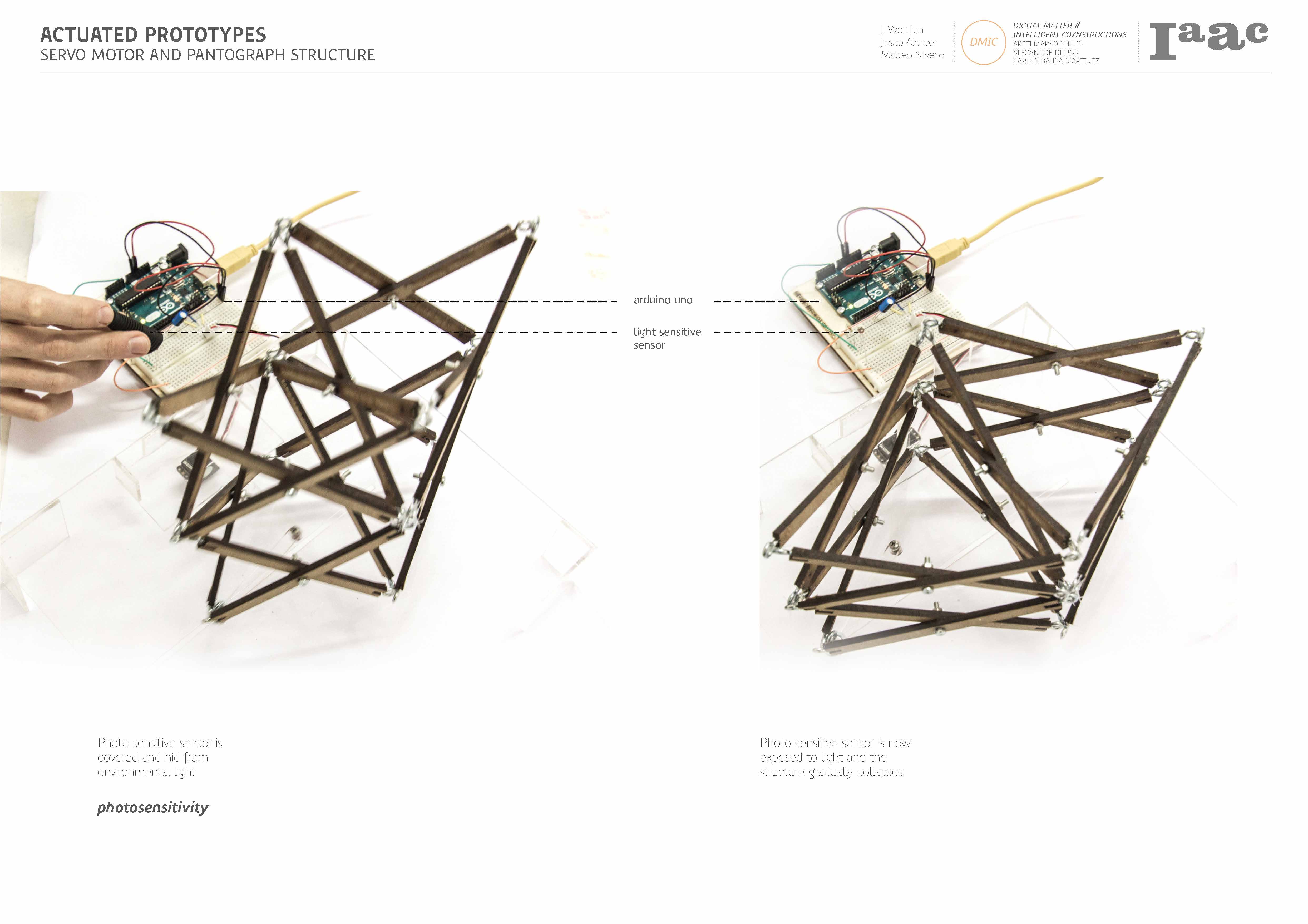
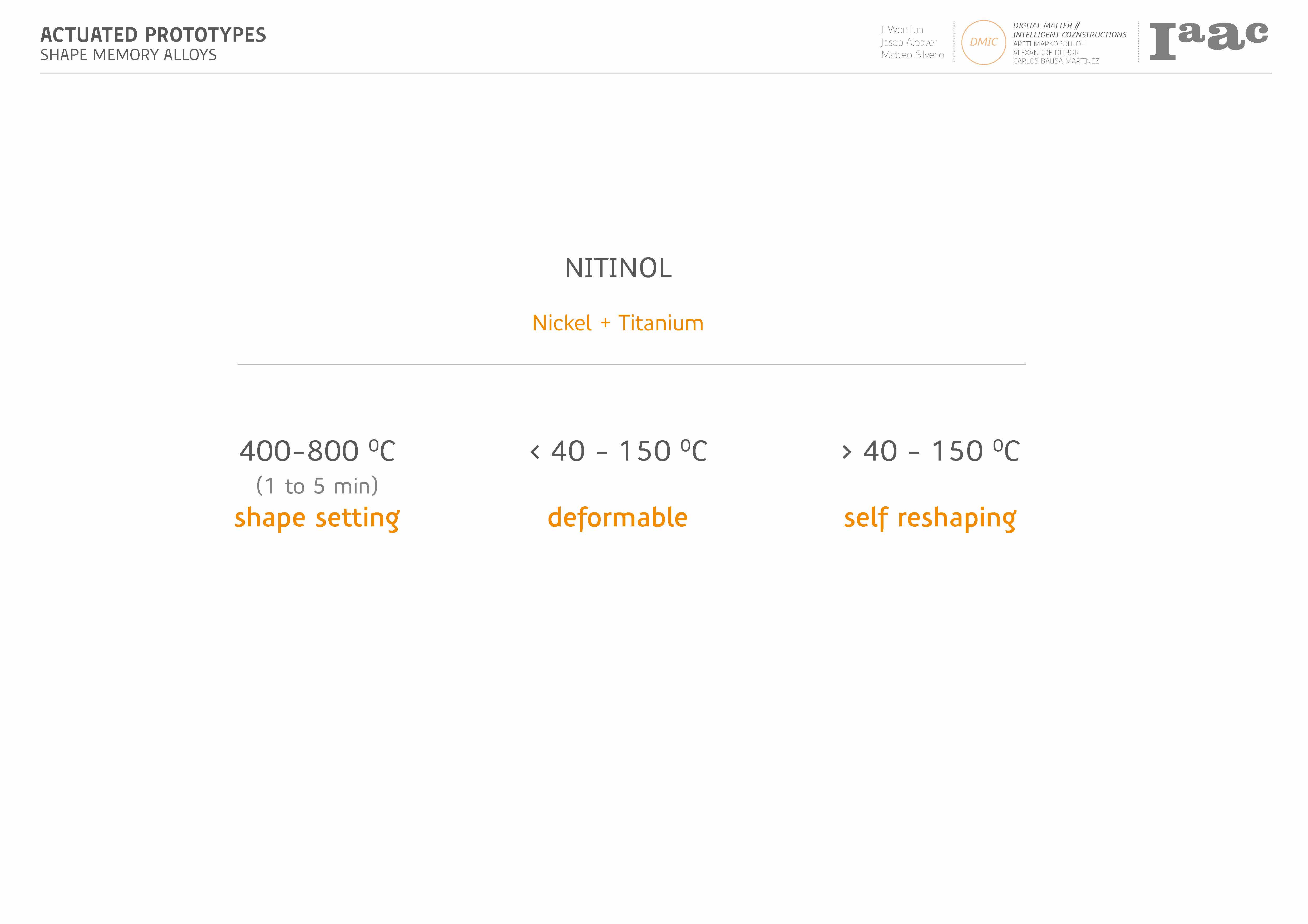
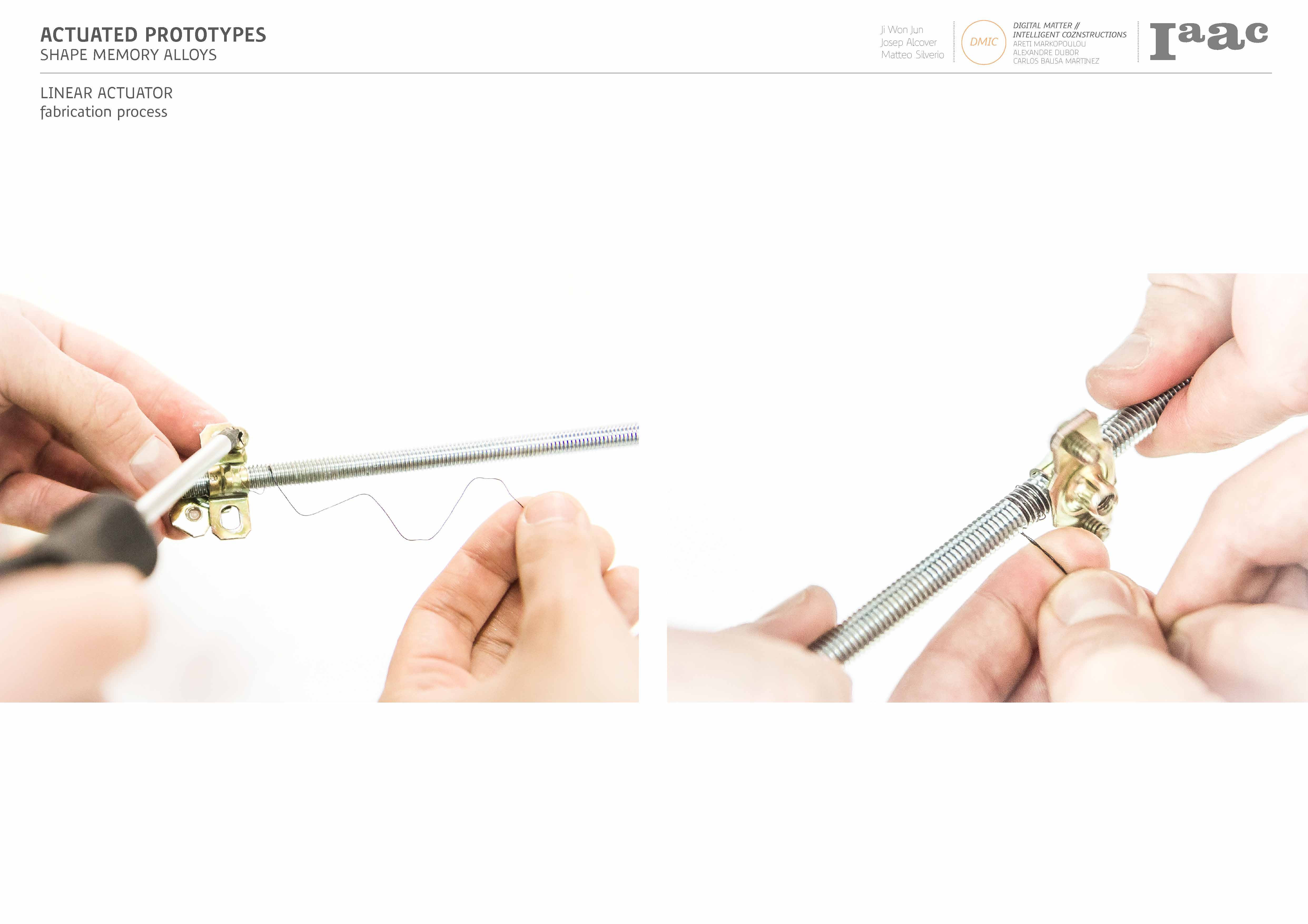
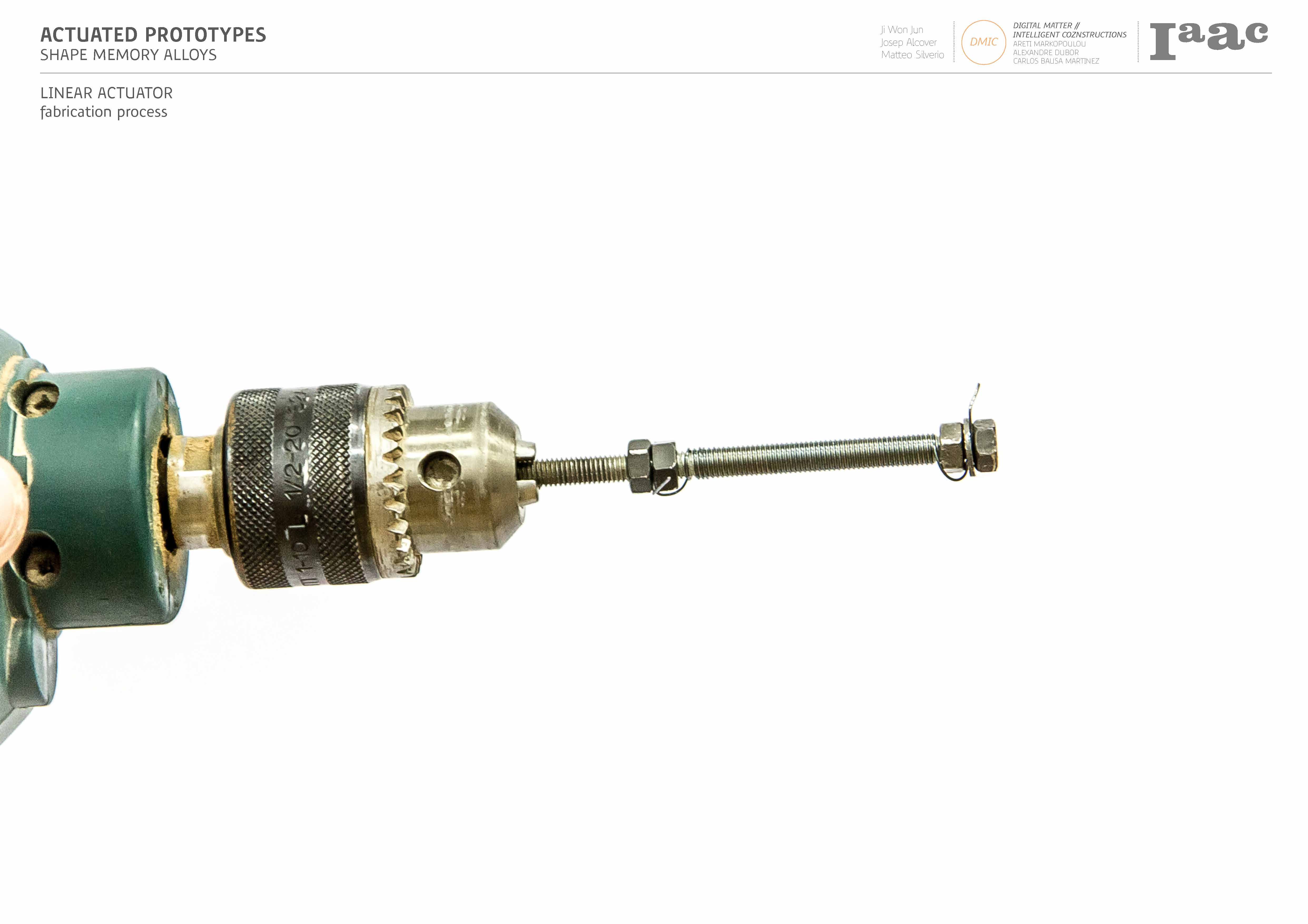
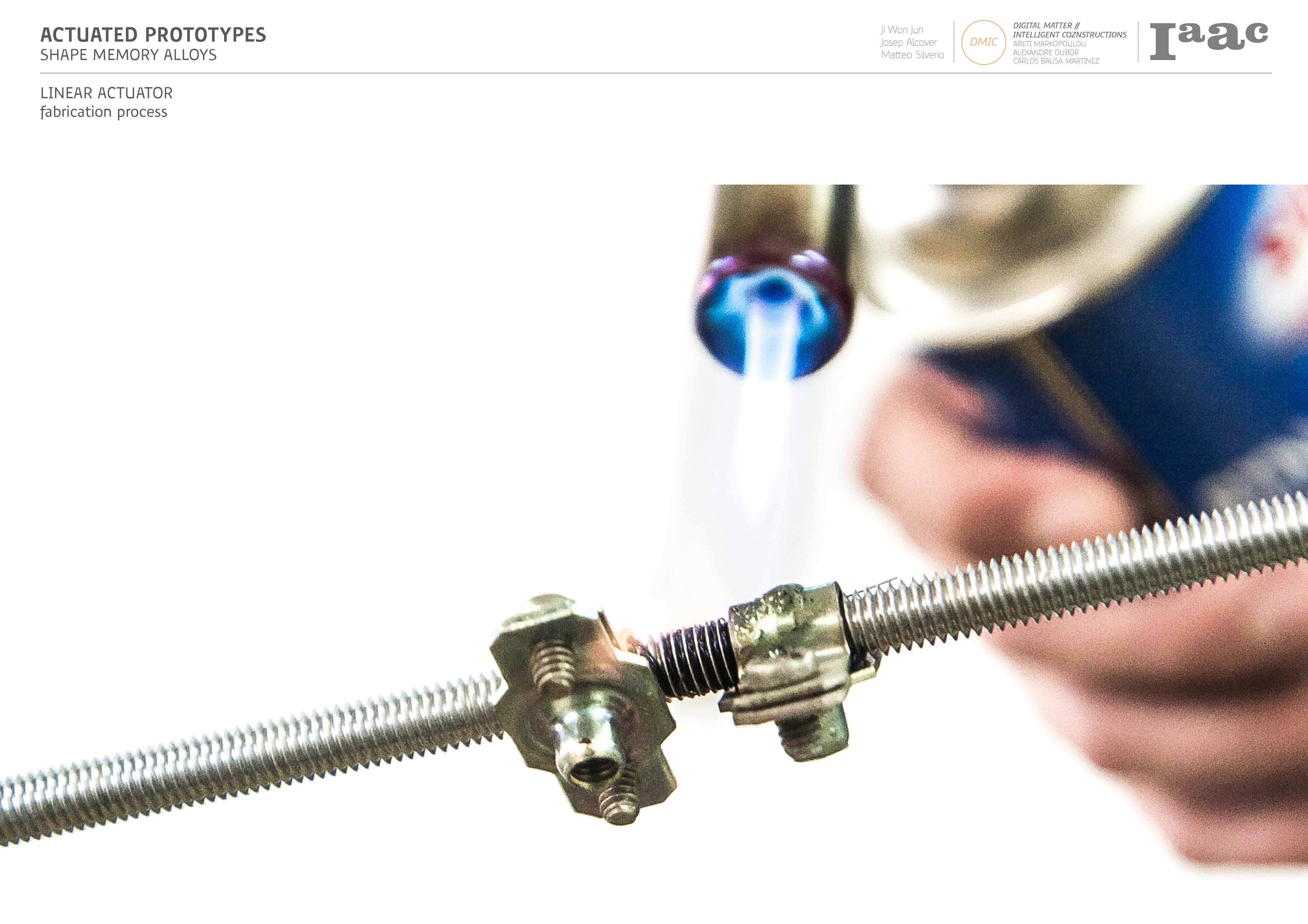
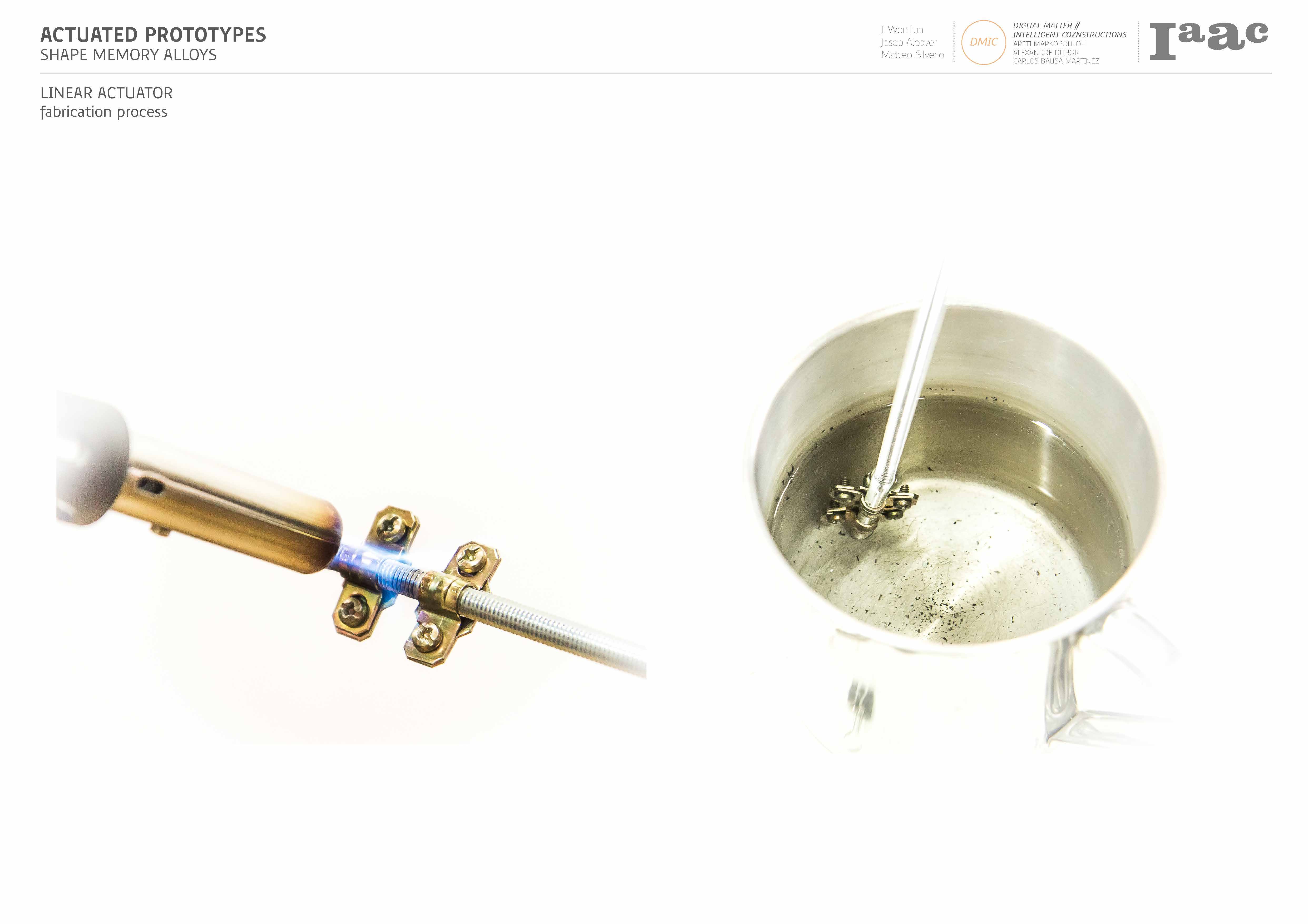
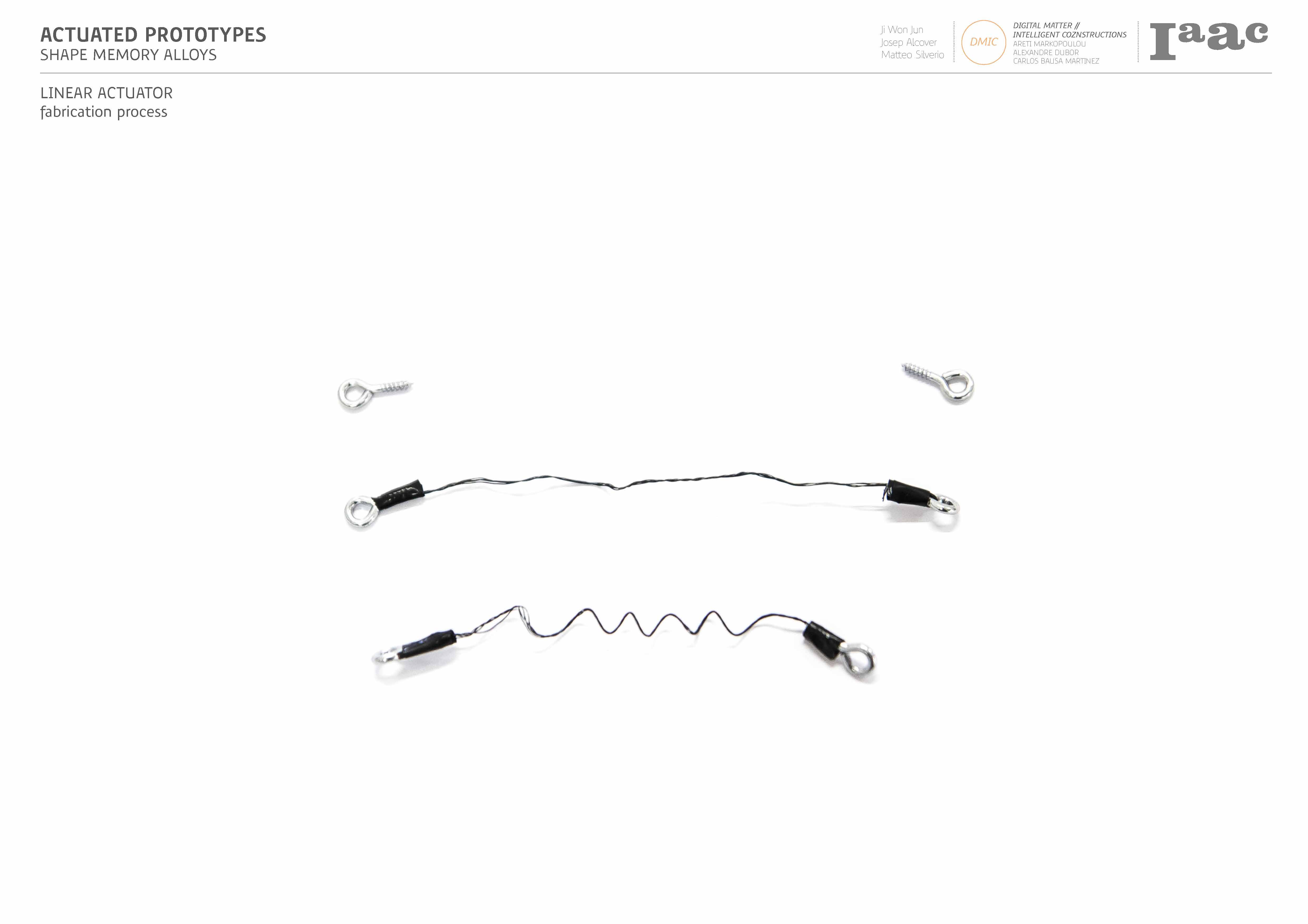
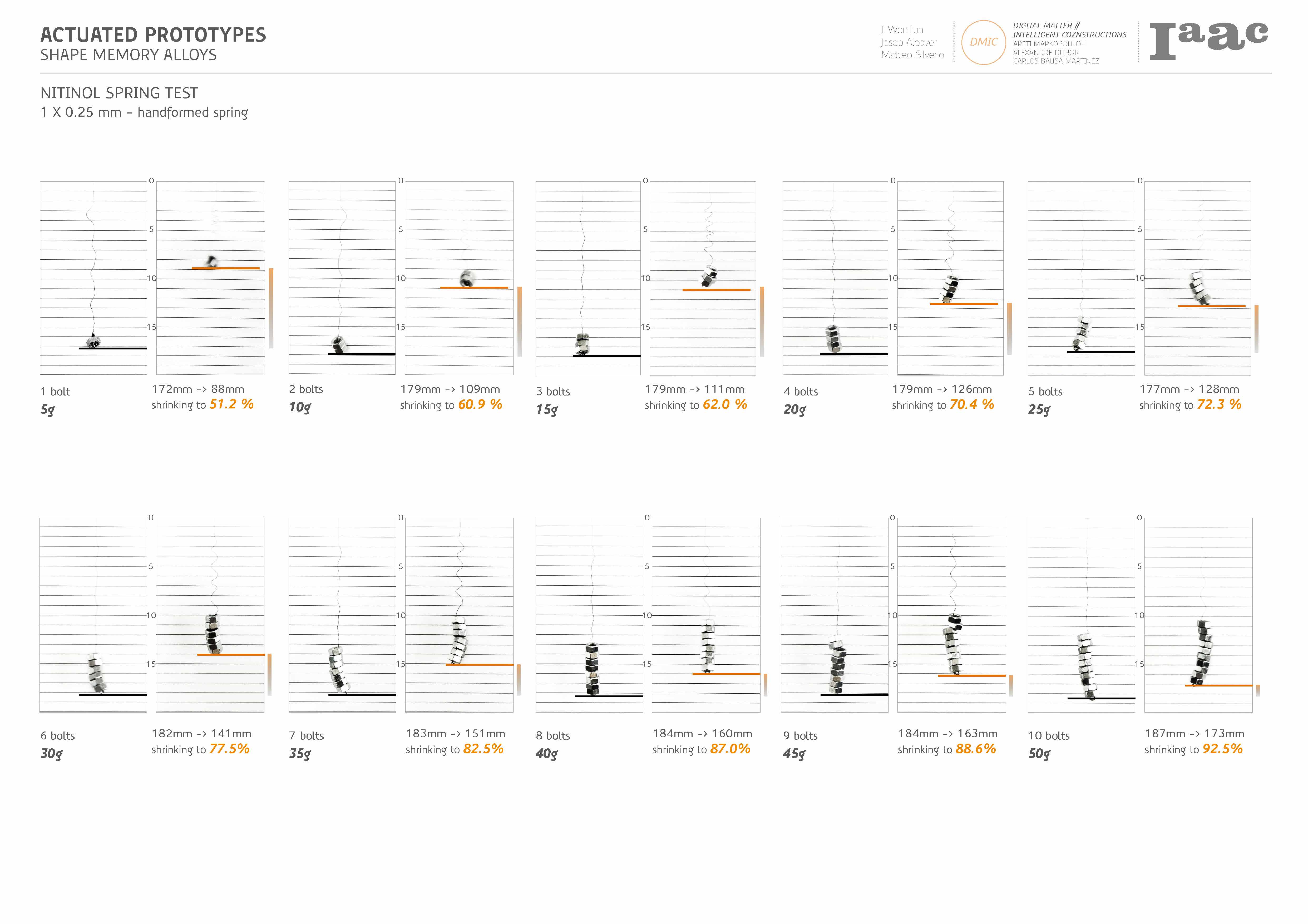
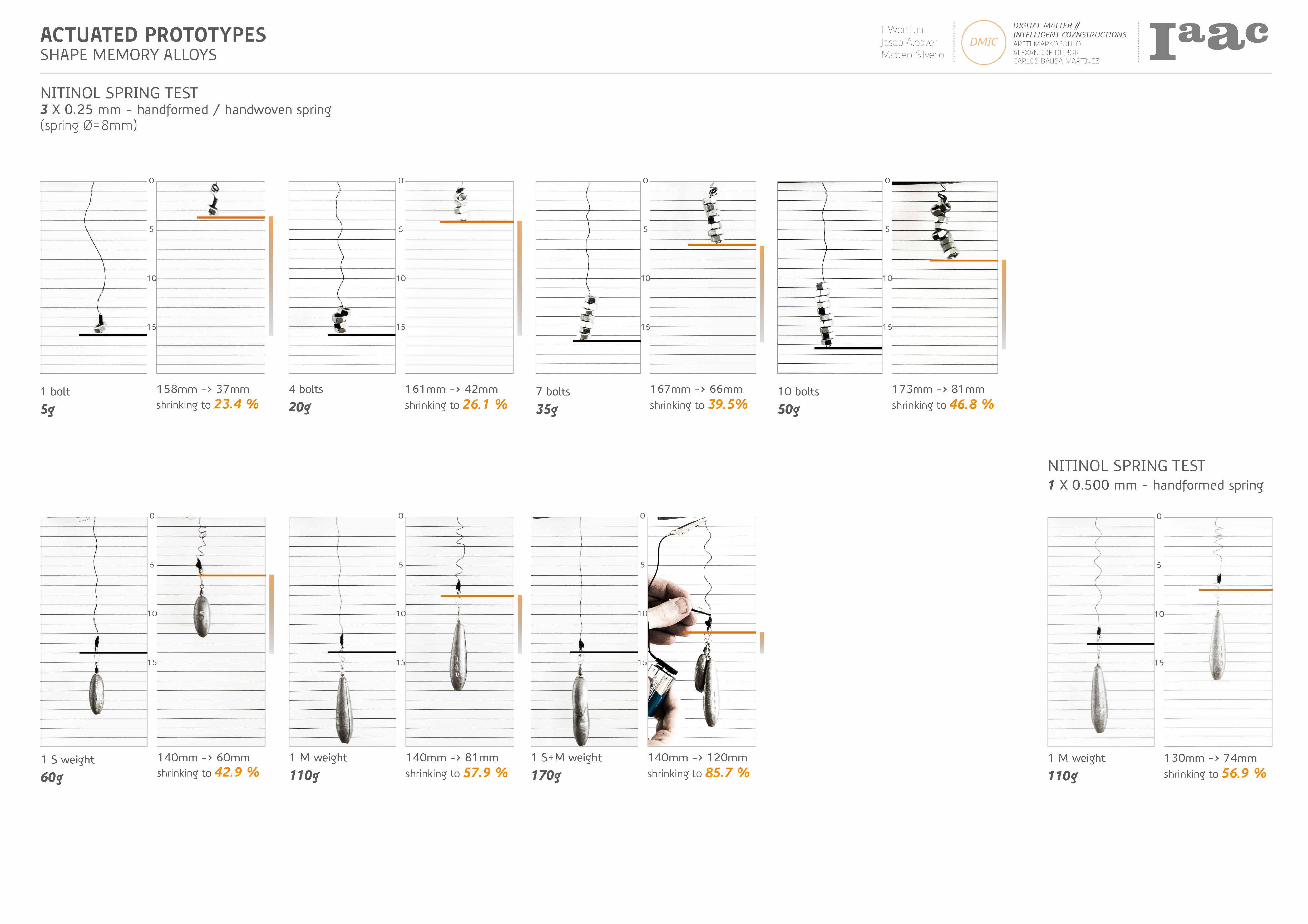
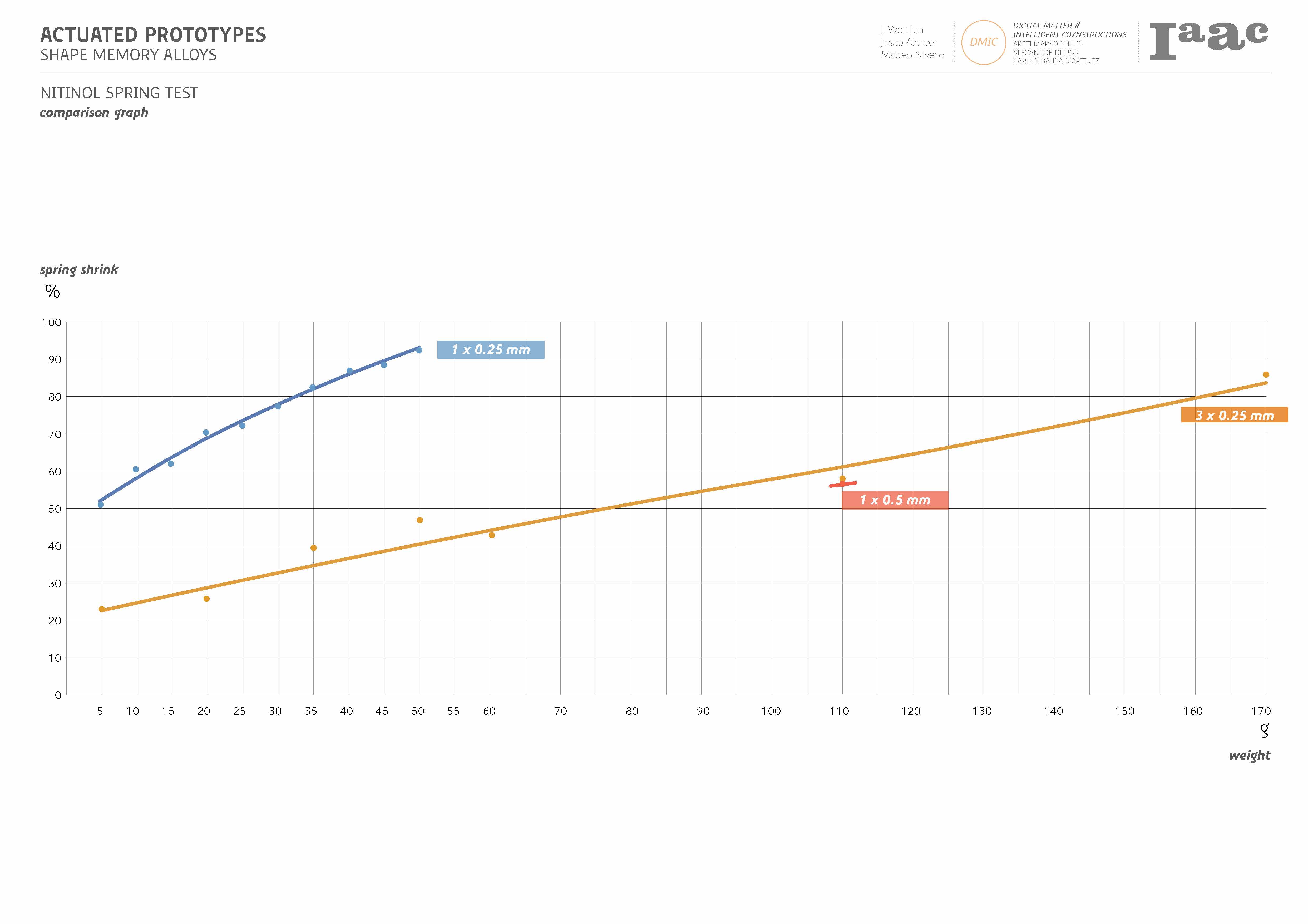
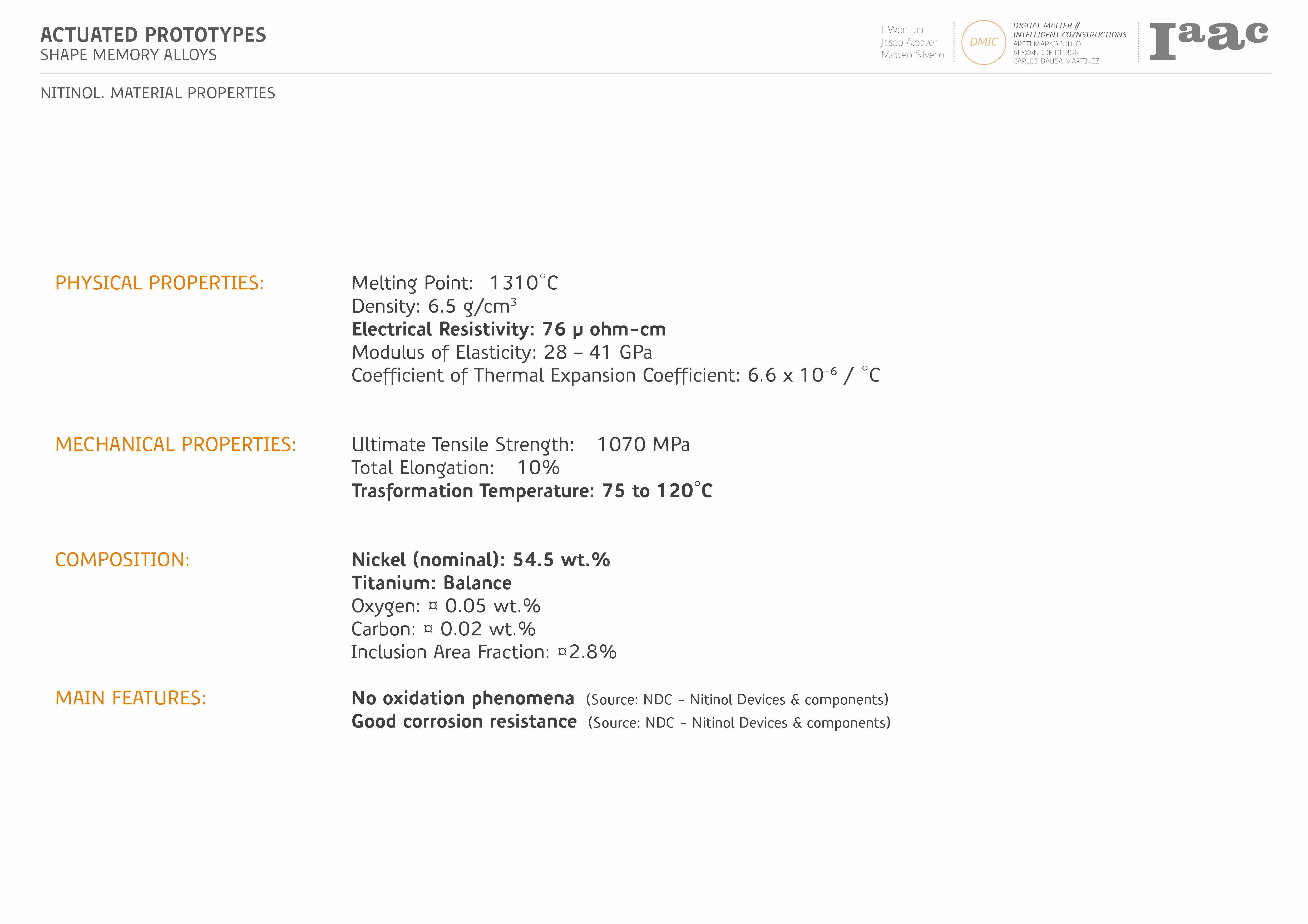
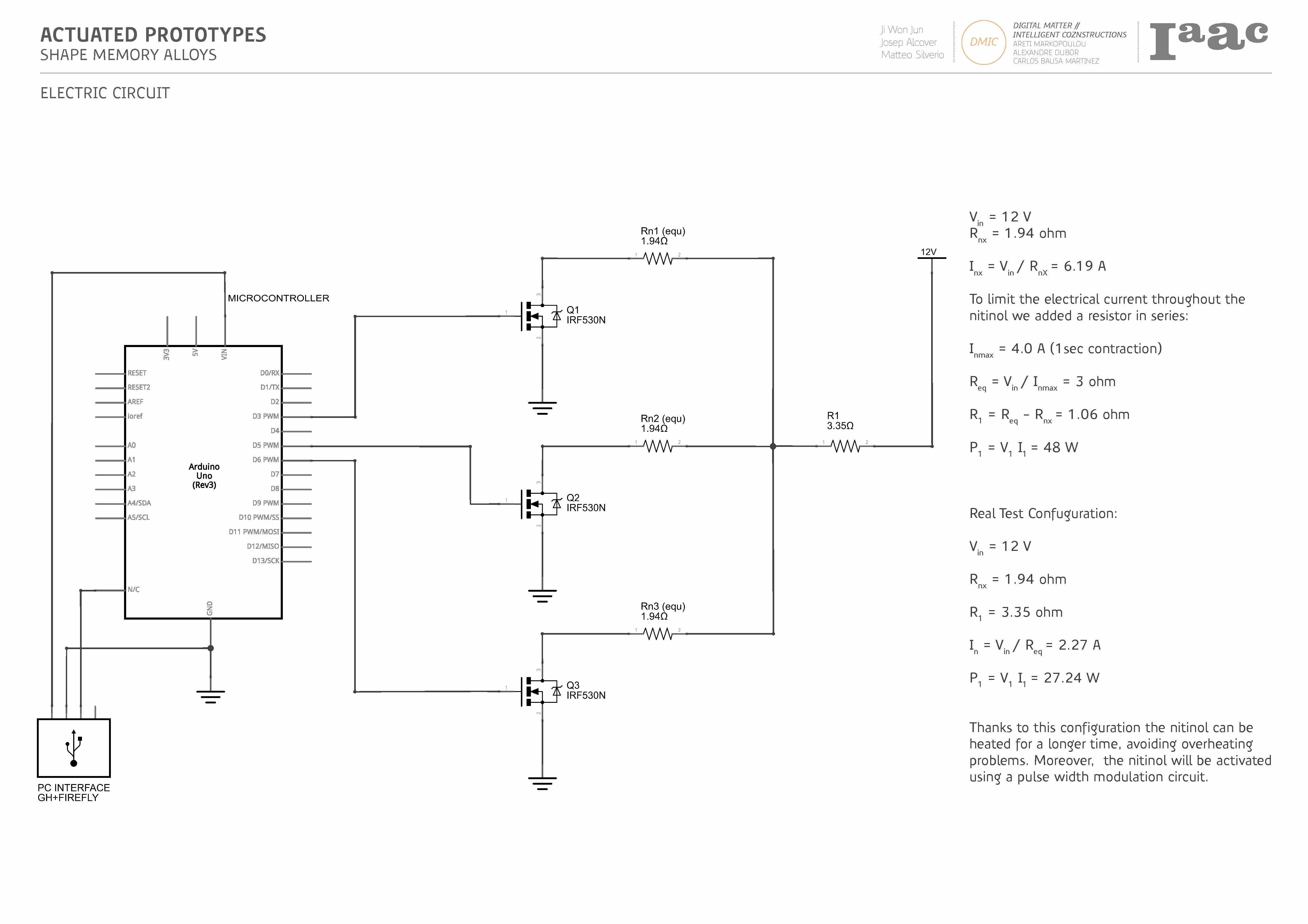
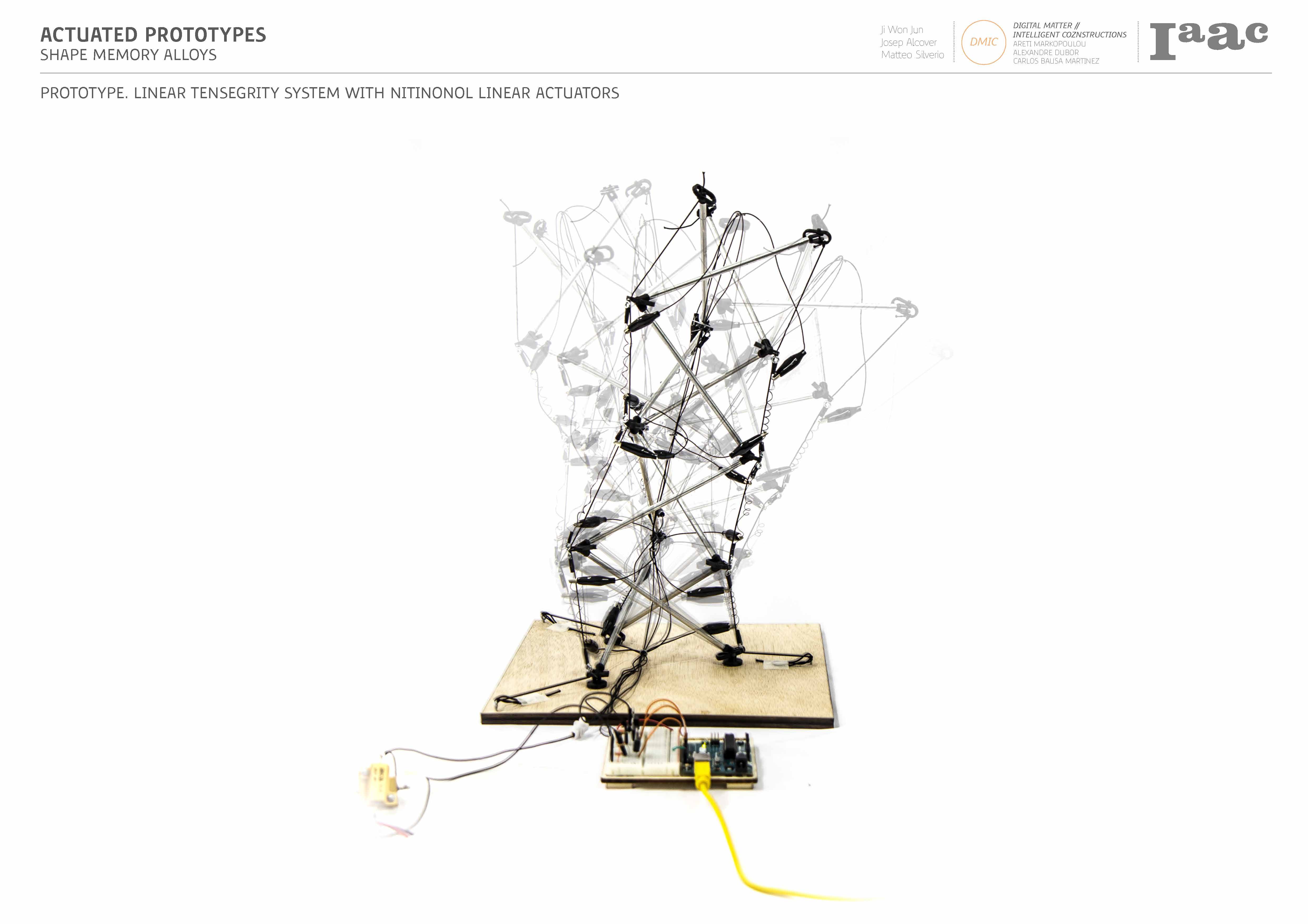
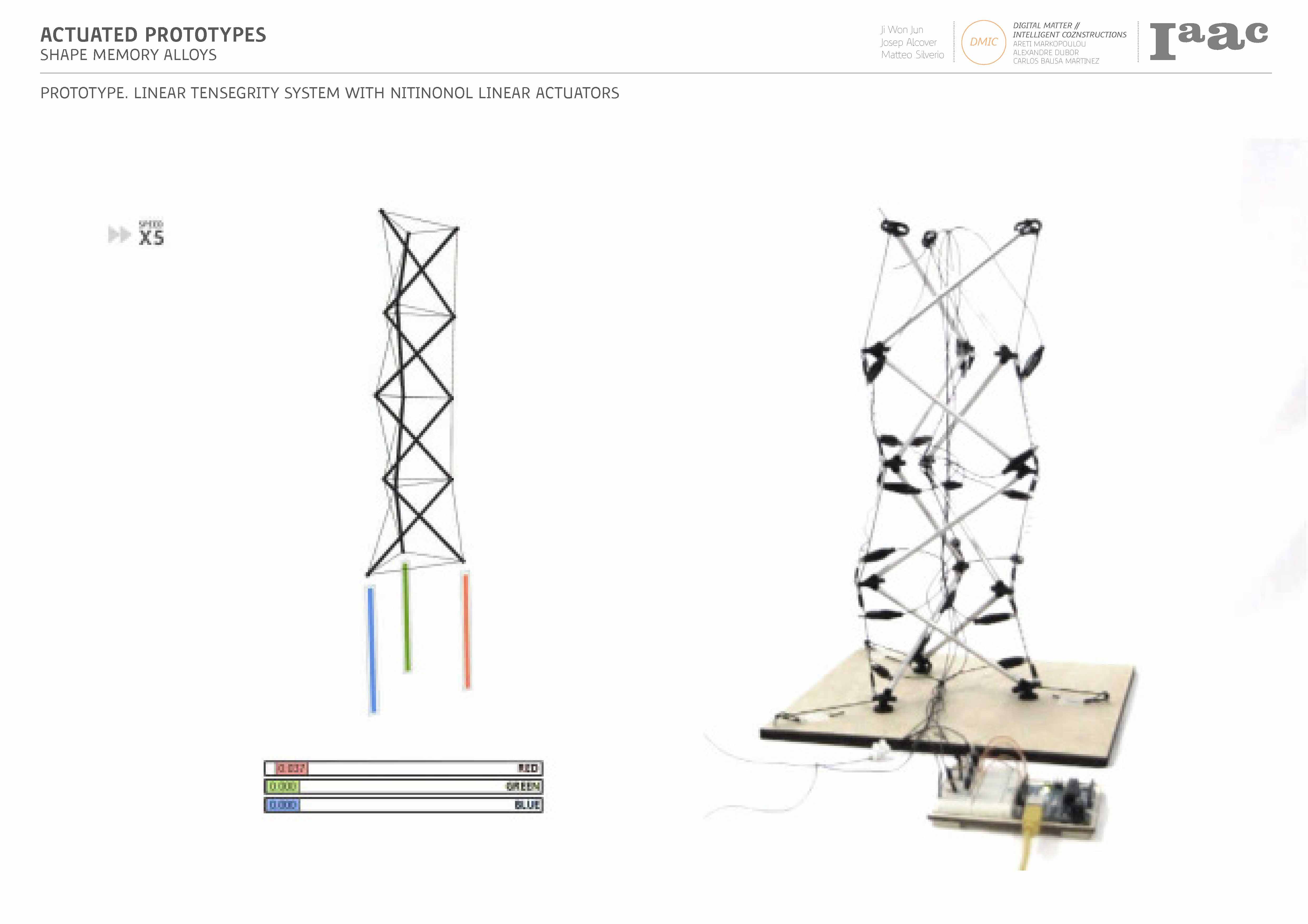
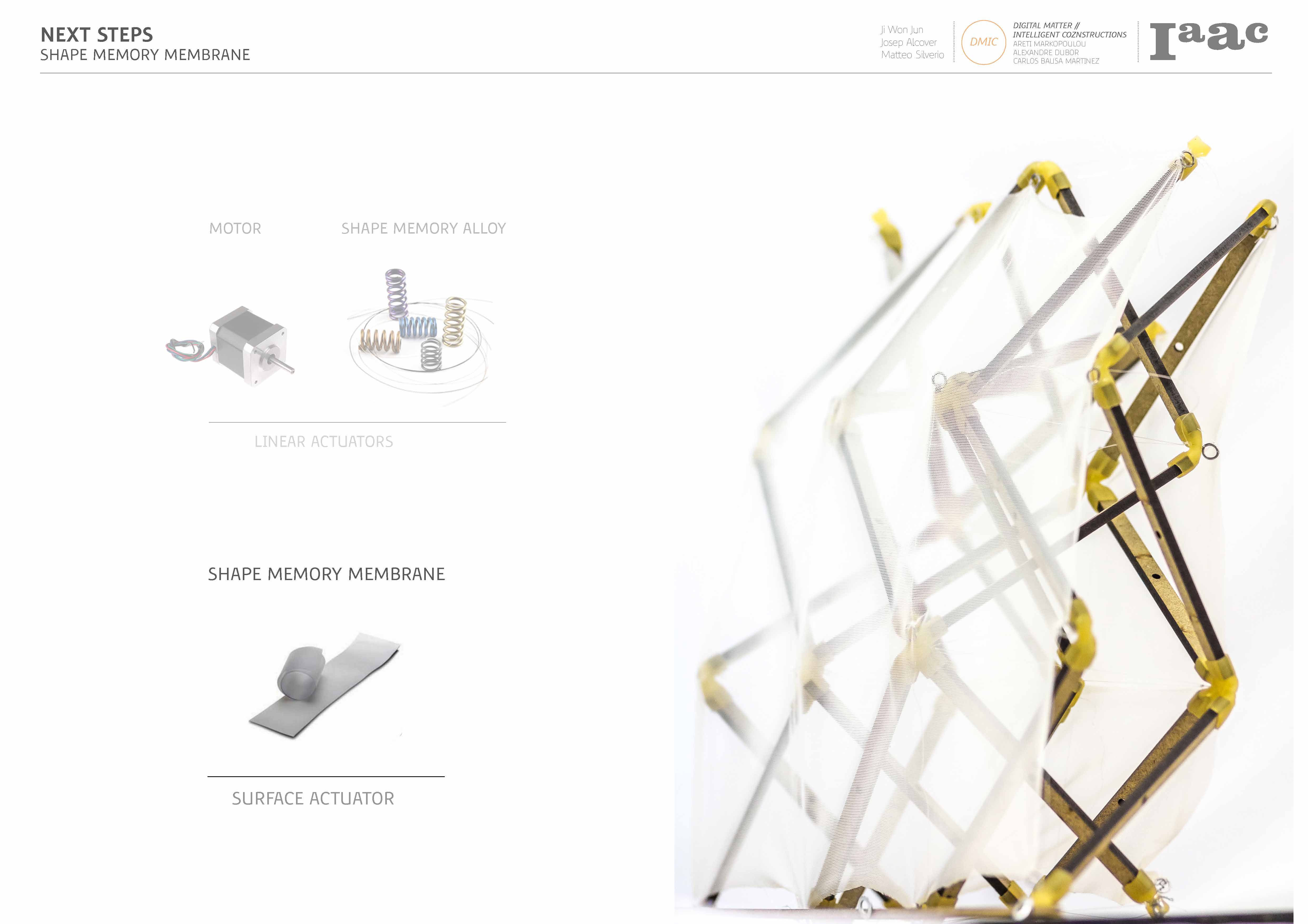
AUTHORS: Ji Won Jun, Josep Alcover, Matteo Silverio FRAMEWORK: Kinetic Responsive Architecture OBJECTIVE: Designing and prototyping a generic lightweight kinetic structural system that can react both to environmental conditions and to user’s needs. DESCRIPTION: The project is based on the study of tensegrity structures as a starting point to develop multiple digital and physical models of different structural systems that can be controllably moved. It is not the goal of the project to design a specific architectural or urban element but to develop a generic system that could be applied in many different ways. The project refuses the use of motors as actuators and relies on Nitinol wires (a shape memory alloy made of Nickel and Titanium) to create a lightweight distributed system of actuators. [CLICK TO DOWNLOAD PDF] (Contains animations)