InnoChain Workshop – Robotic Steering and Control
Robotic steering and control introduced alternative robotic control protocols for design based interfaces. During the InnoChain Workshop, led by IAAC Robotic Experts Alexandre Dubor and Djordje Stanojevic, starting from basics of robotic kinematics, different strategies were explored for path planning with Rhino & Grasshopper through the integration of a robot 6+1 axis.
InnoChain Workshop – Robotic Steering and Control
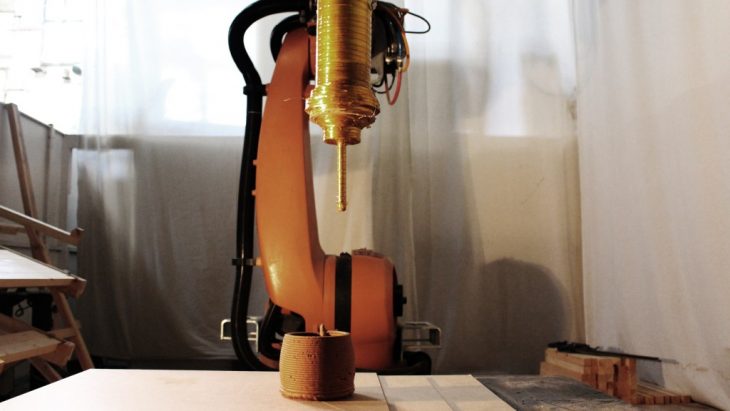
The participants were divided into four groups and invited to develop their own fabrication process, as well as rethinking the way we use the extrusion system. The teams focused on testing cantilevering limits, integration of an external axis, support of sensors, and inflatable formwork.
The background was defined by the additive manufacturing and robotic fabrication knowledge developed extensively over the last couple of years at the Institute for Advanced Architecture of Catalonia. Tools for extrusion and various types of clay were provided by the Institute, as well as the digital and hands on support during the development of the workshop.

InnoChain Workshop – Robotic Steering and Control
To enrich the content of the course, material performance through different composition and fabrication methodologies were proposed for the exploration and idealisation of new possibilities at the architectural scale. Therefore, having the goal to build on these precedents, the focus was set to be explicitly on the process.
Specific additions to the course were the introduction to the Kuka Robotic Language (KRL), Arduino, and Processing towards the establishment of a real time feedback loop from the physical to the digital world. Based on that, the students were exploring interactively robotic extrusion with an emerging design approach.

InnoChain Workshop – Robotic Steering and Control
