Research Problem
The current model of urban growth and urban sprawl in high population density environments is not sustainable. This trend cannot continue into the next century, where the world population is set to be over 7 billion in 2050 with 70% of that figure is expected to live in urban megalopolis areas. The repercussions of inaction will lead to the eventual destruction of the world’s ecosystems, the basis of our living itself.
It is therefore necessary for humans to rethink how we occupy spaces and consume resources in our habitation environments.
“architecture is being forced to radically refractor its response to new social and cultural challenges and an accelerated process of urbanisation. All over the world, cities are emerging in the kind of timeframe that buildings are usually developed in, and outdated practices dictate that these cities are generic, unable to adapt to the ever changing needs of the built environment”
– Theodore Spyropoulous
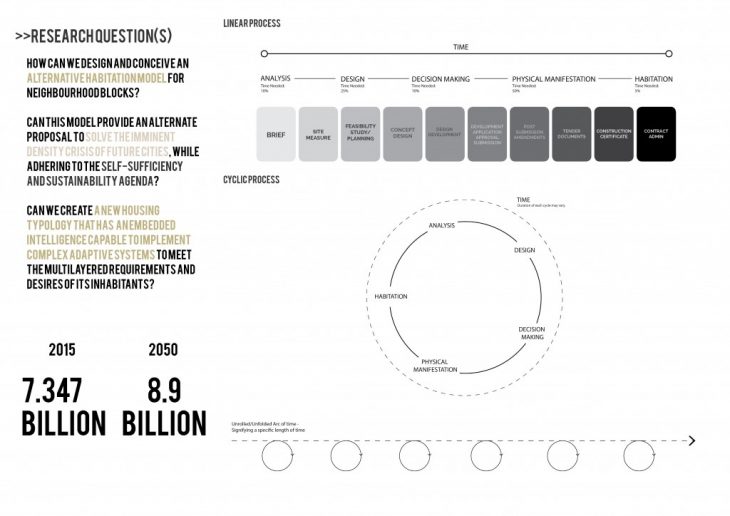
The issue highlighted above relates to the inability to respond to the current pace and ever changing complexity within the different environment we inhabit, albeit be environmental, socioeconomical, cultural or political. For our purpose, it is necessary to first address the complexities within our habitation patterns of our housing environments. Current issues lies within the lag and delay between the analysis, the decision making process and the physical manifestation or implementation of the process. Today, it is not sufficient to manifest/build a scheme that was conceived as a result of analysis of contextual needs of a time years before the feasibility of project inception. Like all current developments in technology, the built environment needs to have the ability to continuously adapt and respond to the contextual changes, at a pace that is closer to realtime.
What will be the habitation model of the future housing architecture?
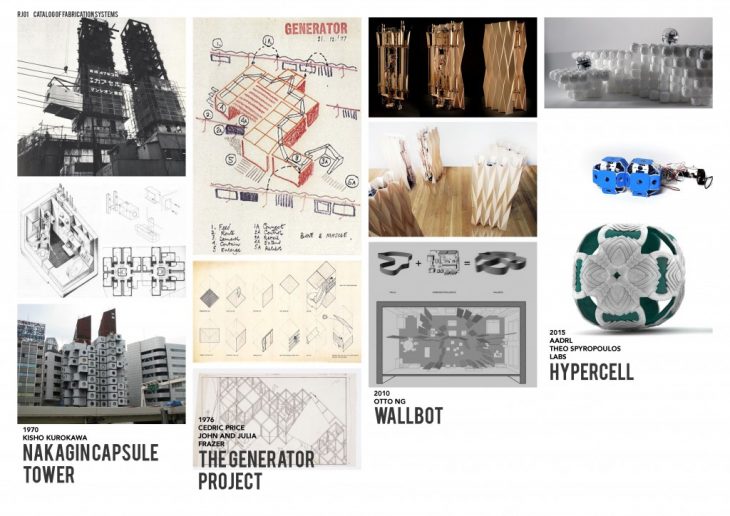
Dynamism, Adaptability and Reconfigurability are not new concepts within the Architecture or AEC Industry. Many projects have attempted and created an array of solutions to address or explore these notions. The projects below are just major examples that illustrates this desire.
Hypothesis
The use computational design and machine learning techniques to embed intelligence within habitation structures will enable occupants to live more in sync with their everchanging contextual environment. The implementation of this system will force the rethinking of the conventional design process, changing it from a linear model to a more cyclic or looping model. The system will periodically scan and collect data of spatial usage, observing patterns of living and activity within various habitation spaces.
[Theoretical Physics Input] If we perceive and generalise the progression our path in life to be that of a linear function, we are limiting the potential to decrease the “response time” to eventsthat appear throughout our lives. What if we perceive our progression in time as a spacetime matrix [habidatum example] Widening our scope to be able to perceive other potential alternate timelines. In this case, we will be able to weigh different options at various events, calculating and simulating the implications of a particular decision that we will need to make. Once the implications arecalculated, it is then possible to formulate a response ahead of time, before the next breach of the critical threshold or event instance. When the particular instance of the event is reached at a later time therefore, it is possible to recall the preformulated response which enables the user to act with a greater precision and efficiency.In this way, the user will need to constantly engage in a negotiation process between his/her needs and the needs of the system to reach a dynamic equilibrium. The spatial definition can change to adapt to the needs of its inhabitants. At the same time, spaces that are infrequently used will be taken away and reused for the needs and requirements of other inhabitants within the system/block. Therefore, the system can be a new approach to optimise quality of life of its inhabitants without major compromise of the natural environment in its growing process.
How would one begin to start to conceive and materialize such a concept?
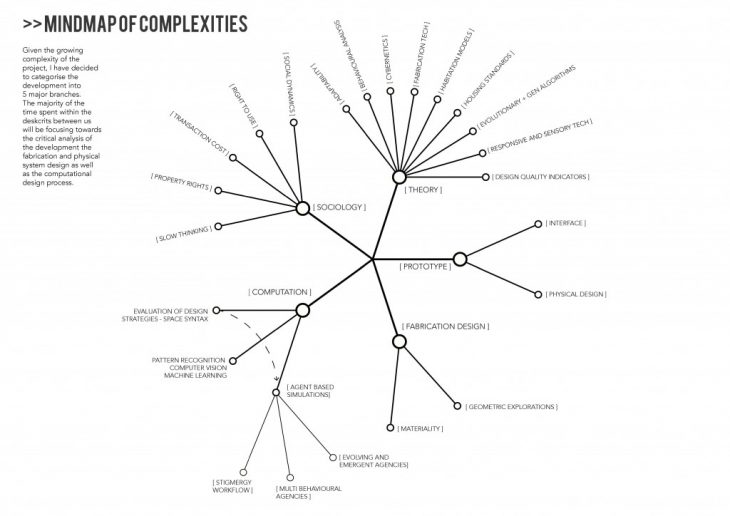
These are the different branches of studies and explorations that need to be considered when building the system outlined in the hypothesis.
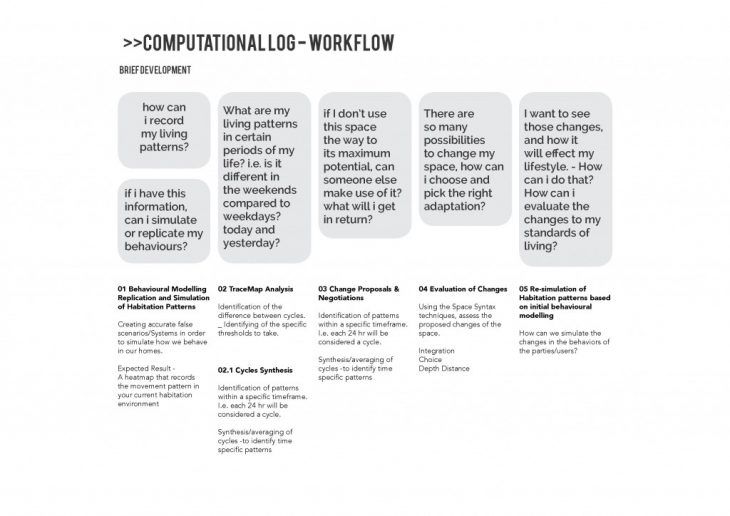
For this particular Thesis and time feasibility of the development, I shall only be developing the computational aspects of the system, with the goal of demonstrating a workflow or interface that can be embedded in future housing typologies or systems. The workflow is as follows.
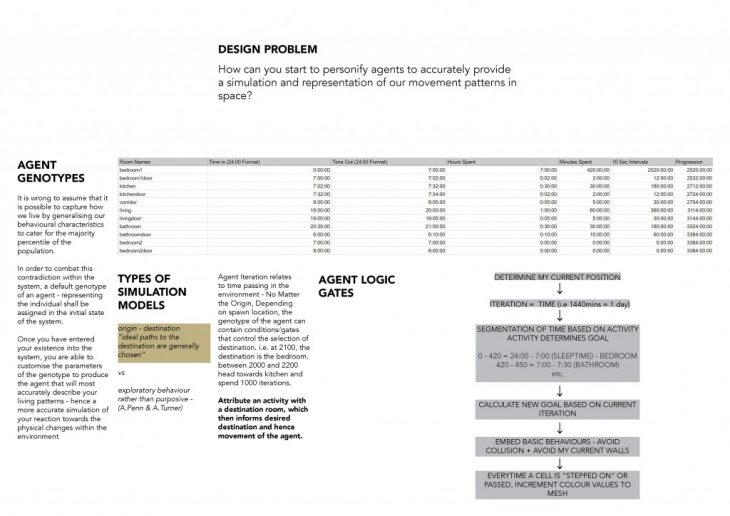
The use of agent based modelling or systems is the closest computational model existent that simulates actions and interactions of autonomous agents. Similarities can be drawn between humans and autonomous agents, due to the nature of our lifestyle. With the development and personalisation of an agent based system, it is possible to start to simulate habitational patterns of occupants in housing units to a degree of accuracy. Researchers in George Mason University – Centre for Human Modelling and Simulation – have tested and identified four types of actions that is required to be embedded in the simulation – “scheduled, reactive, opportunistic and aleatoric”. The design experiment will build upon current models in order to provide a more comprehensive data and results for future uses.
A case study site has been selected in the pilot Supermanzana or Superilla within the Poblenou District in Barcelona. 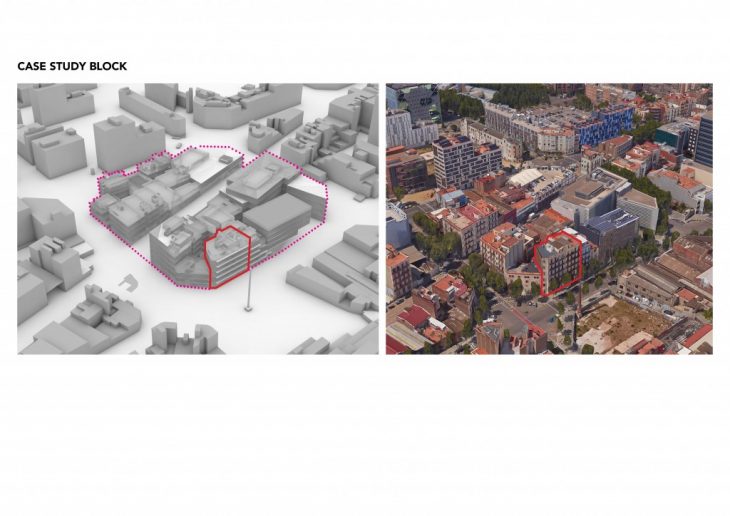
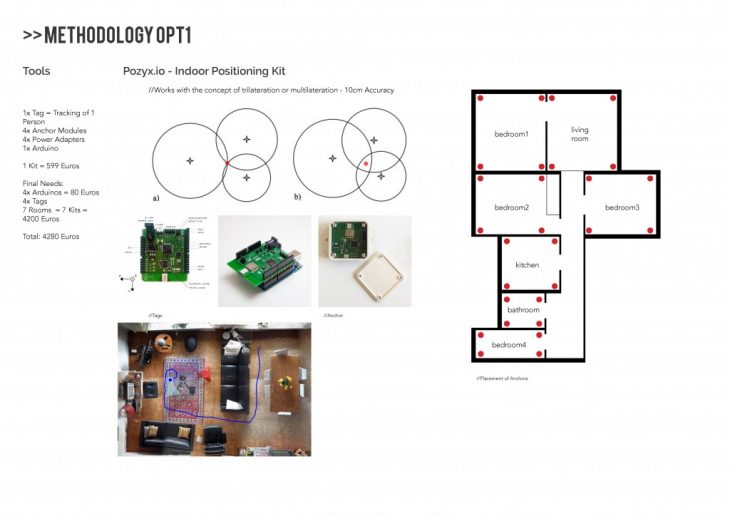
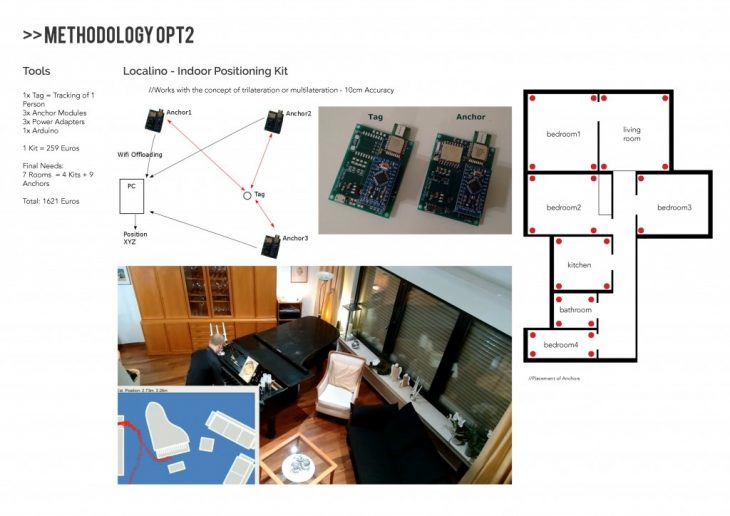
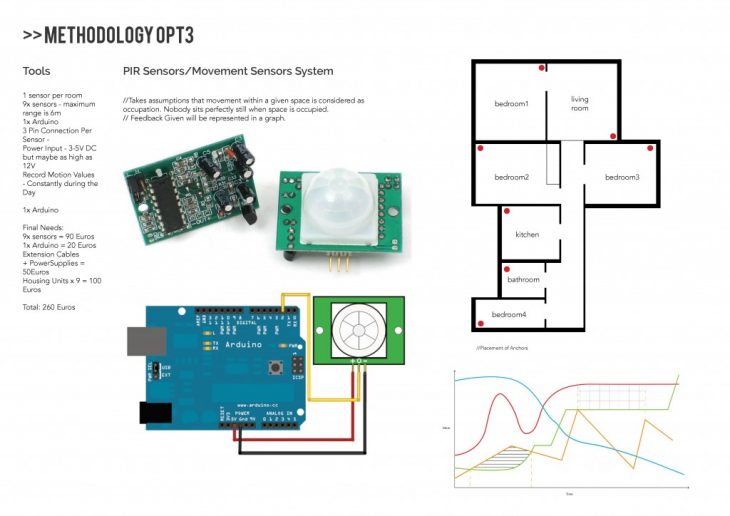
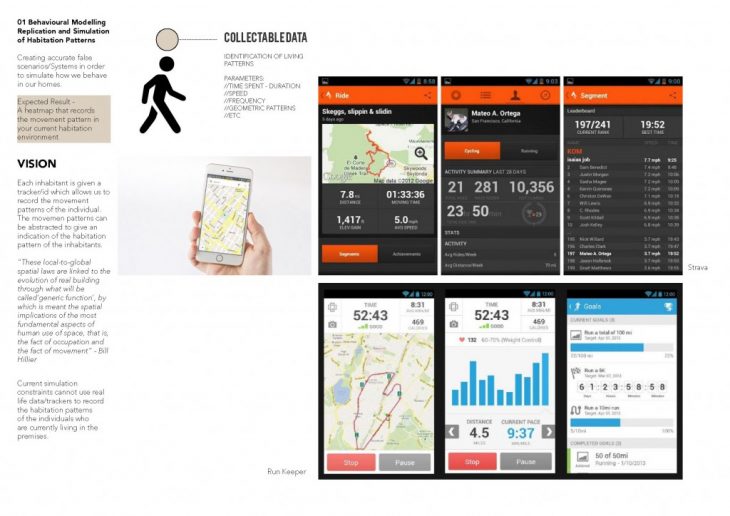
What is envisioned within the perfect system will be a method whereby your home will be able to collect your habitation patterns. This technology has already existed in many aspects of our lives, i.e. to track our movements while we are cycling or running. These types of system uses a GPS(Global Positioning System) while the system that I am proposing will use an IPS (Internal Positioning System). Experiments on how to achieve this has been outlined in the appendix.
For now however, it is necessary to create false scenarios that can be fed into the initial system, in order to prove and test the complete workflow.
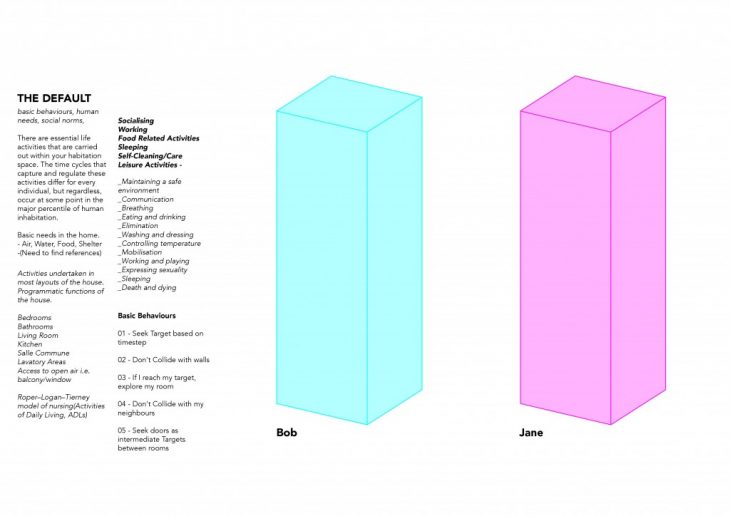
Sped up Simulation of Bob and Jane.
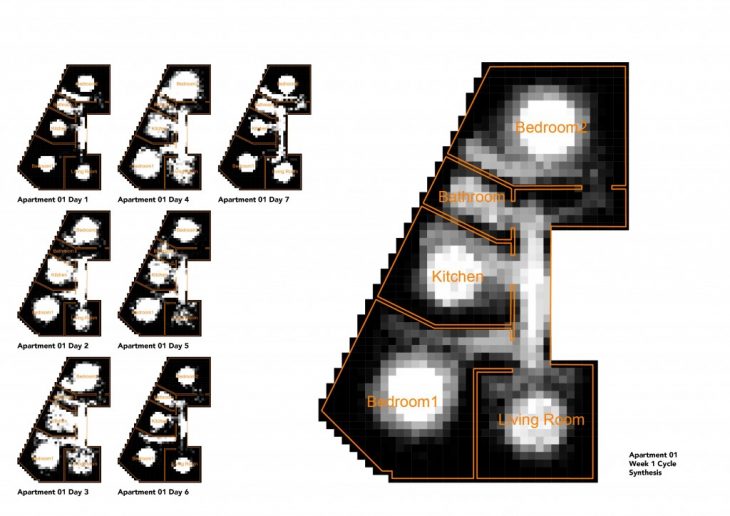
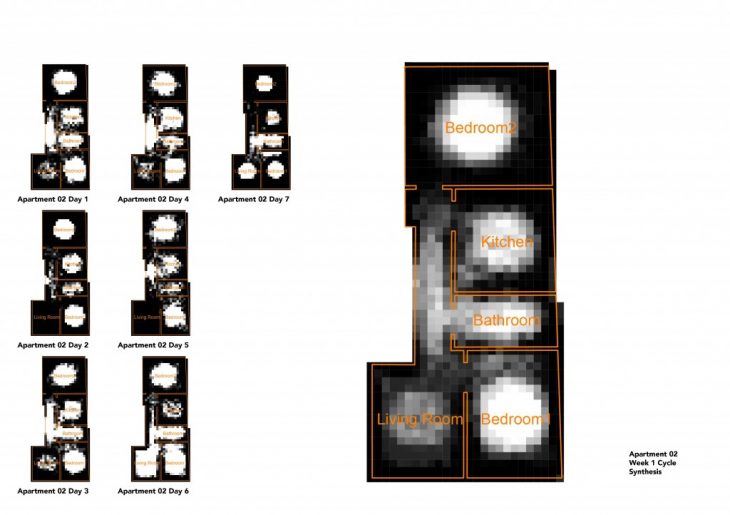
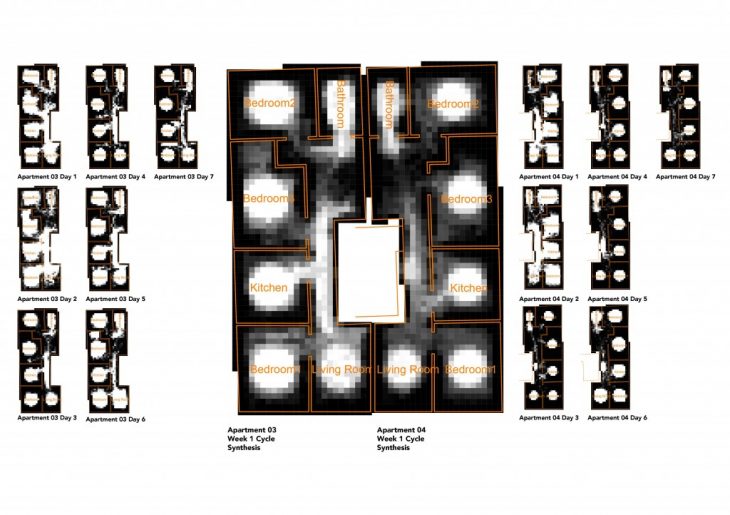
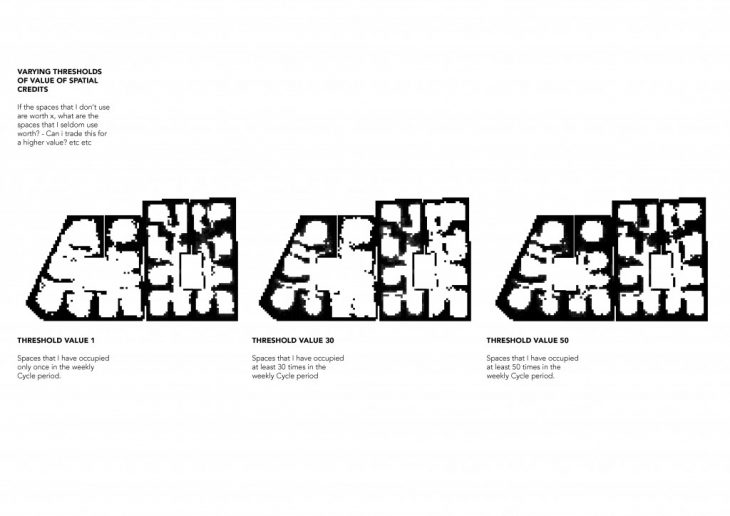
Once the living behaviours are simulated, it is necessary to record their footprints or tracks as they moved through time. This is done to give an indication as to how the users are effectively utilising their space and is recorded on a grid of cells. The number of instances you cross or step on a cell will be recorded and value mapped, translating the values to a color value from 0 to 255.
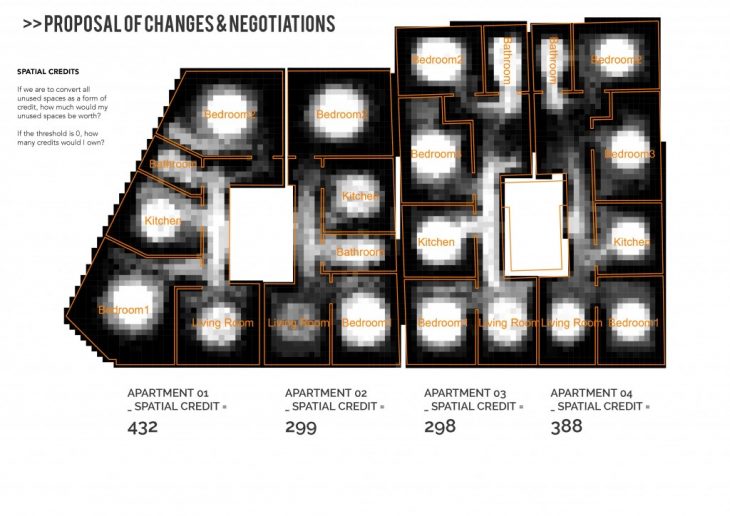
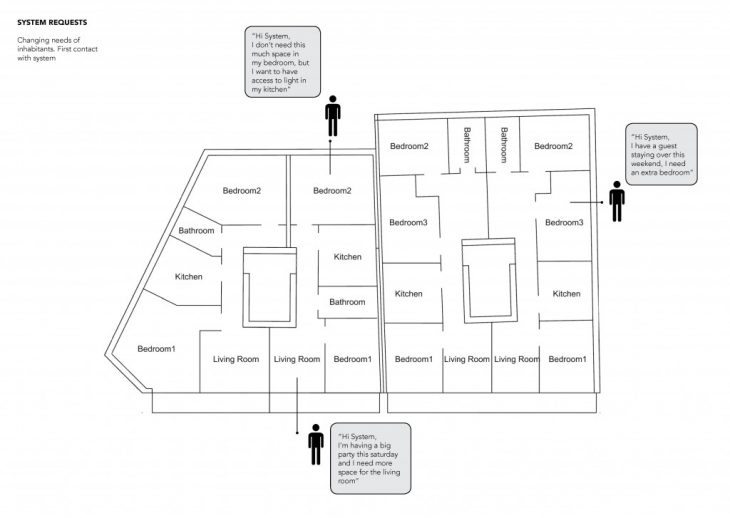
The next step would then be to translate the inefficient areas to available “spatial credits”, where you are able to trade with your neighbours. If a neighbour requires more space for his or her way of living, whether it be permanent or temporal, he or she can start to negotiate the changes with the neighbours and the system.
The validity and accuracy of the false scenarios have been cross referenced with systems conceived by Space Syntax group.
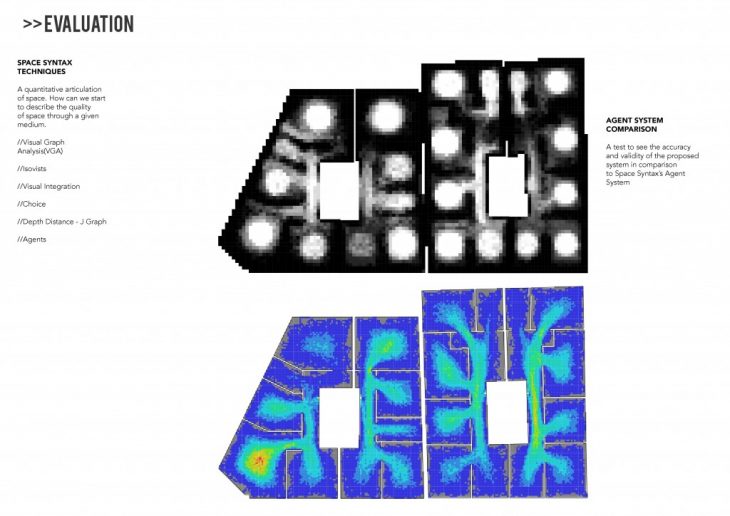
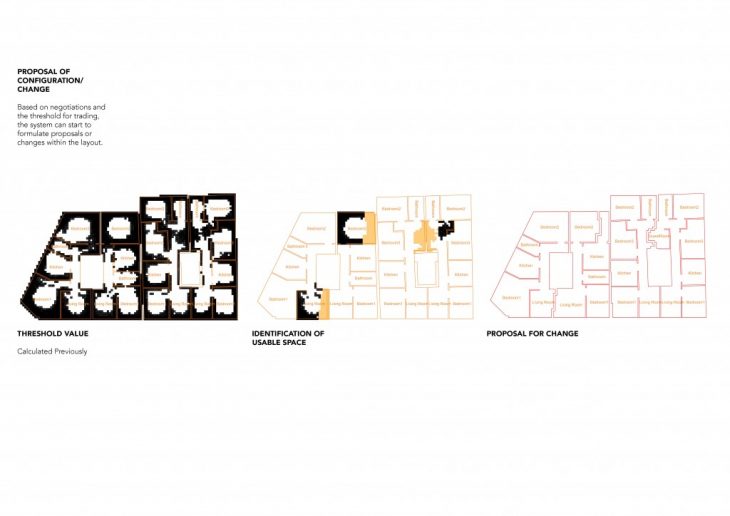
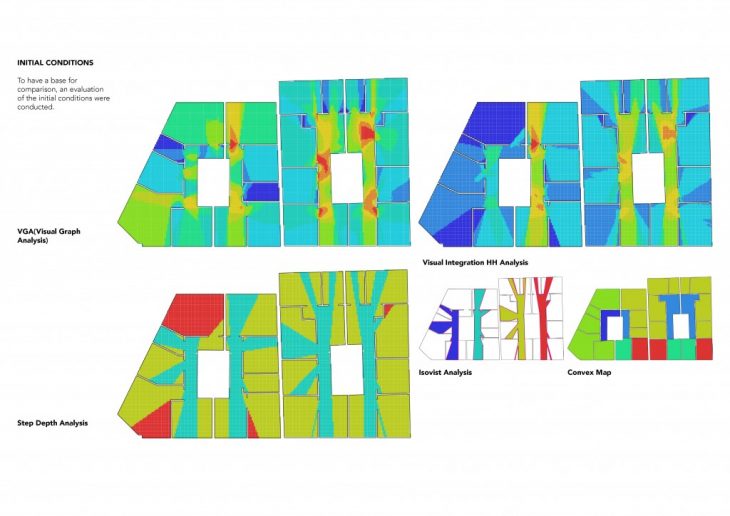
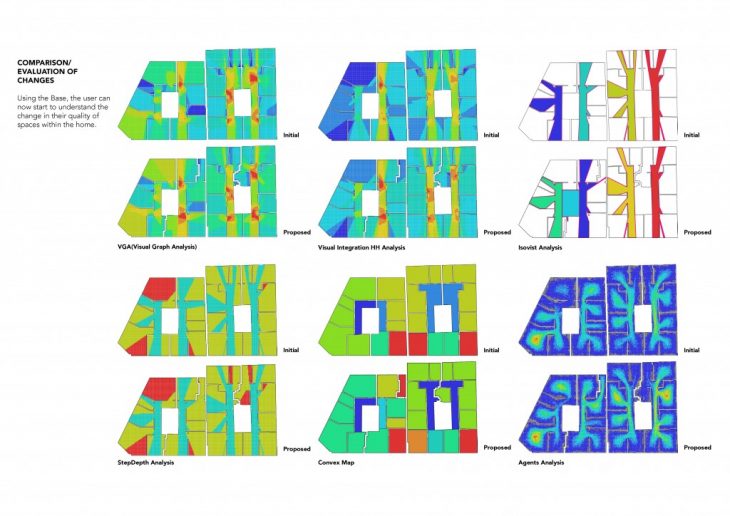
Once a change is proposed, the system will be able to evaluate the iterations and provide a selection for all the parties involved. This evaluation is based of a series of tools that are a part of the depthmapX program. The change is evaluated according to the changes in the Isovists, Visual Graph Analysis, Step Depth Analysis, Convex Map, Visual Integration HH Analysis. For a complete explanation on these analysis methods, refer to “Space is the machine”.
The final output for the research will be an Augmented Reality demonstrator. A tool that will foster a culture for participatory design for the inhabitants in the pilot community. It will have the computational workflow within it and it will allow users to observe the changes in their habitats as well as the implications on their standard living behaviours.

APPENDIX
Localisation Experiments outlines.