From Design to Control Workshop | MRAC 2018-2019
Guest Lecturer: Wes McGee
MRAC Faculty: Kunaljit Chadha
Students: Andrzej Foltman | Apoorv Vaish | Omar Geneidy | Sujay Kumarji
CLAY PRINTING AROUND STRUCTURAL REINFORCEMENT
Workshop Overview
This workshop was investigating design and fabrication methodologies for local tailoring of material performance.
In order to design and fabricate such systems, there are two requirements. The first is a software design framework which allows process parameters to be locally specified along a machine trajectory, and the second is a hardware interface which allows this specificity to be synchronously communicated between a robotic / CNC motion control platform and an end-effector.
Project Overview

The project in as attempt to improve upon the prevalent data gathering techniques by incorporating robotic scanning into the current framework of 3d printing.
Flow Diagram
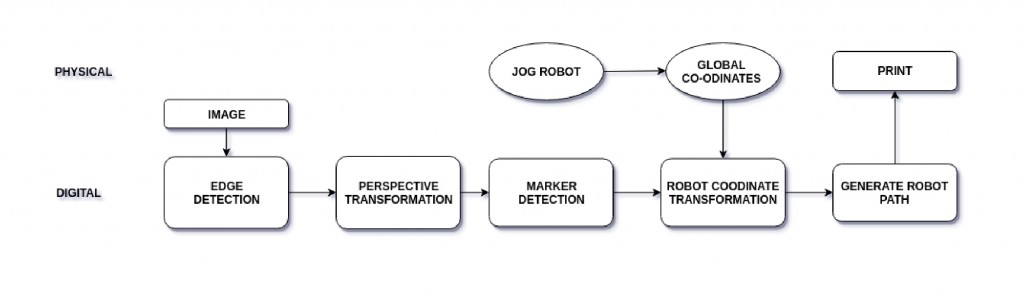
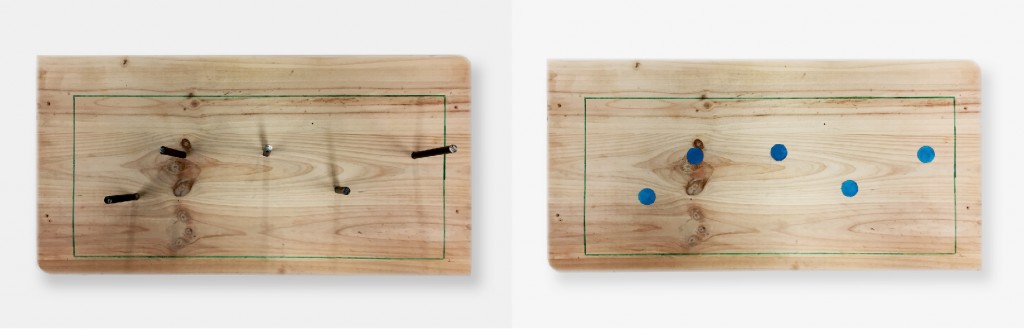
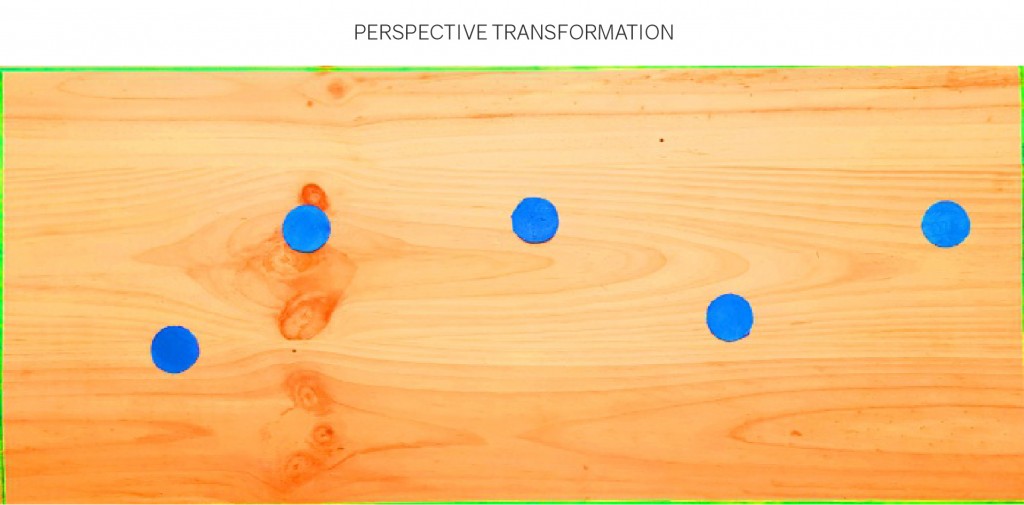
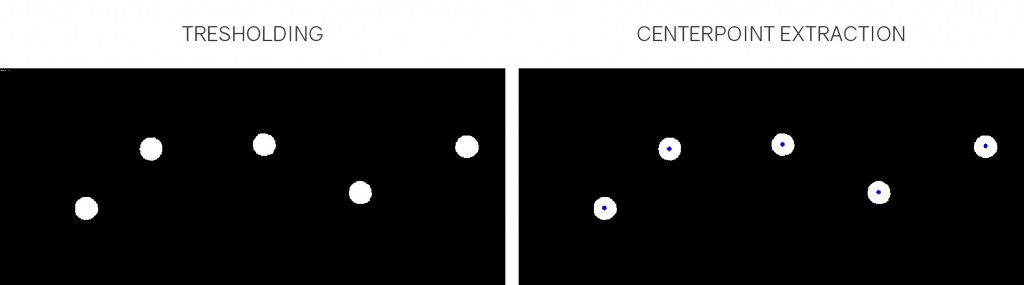
Reinforcement Detection
Marking reinforcement positions
Laser Scanning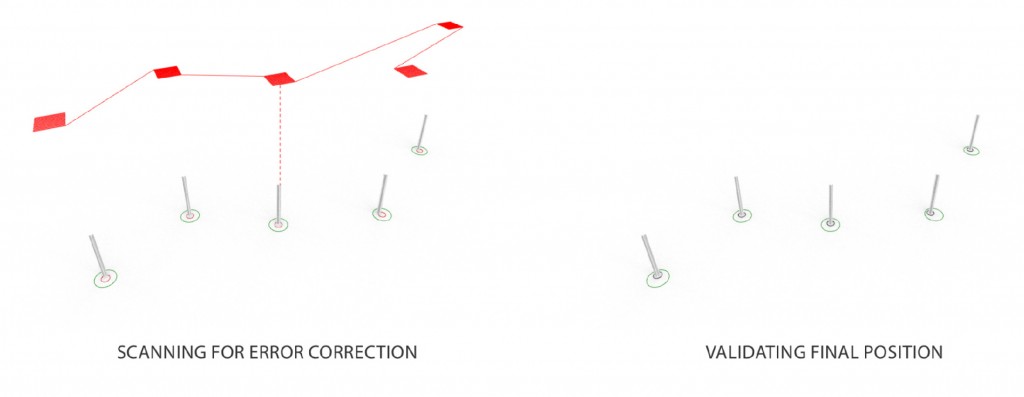
Path Generation
 Parameters For Robotic Path
Parameters For Robotic Path
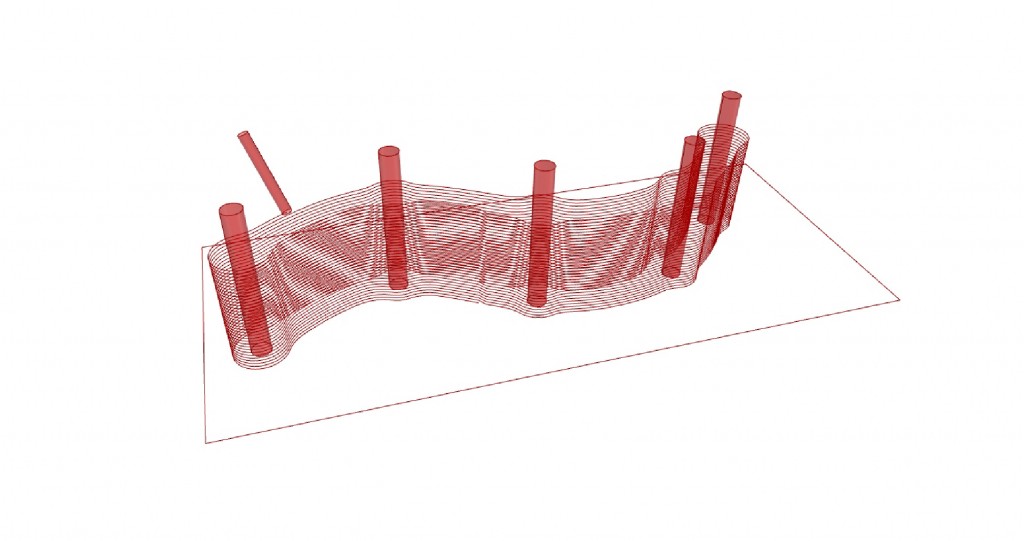
- Ensure Z – Axis is not 90 deg to prevent collision with the reinforcement
- Point of entry shall be at an inclined angle not more than 20 deg
- Define a reference path to generate the inclined axis
- A nozzle path tangential to the geometry is preferred
- Change in velocity should be monitored to prevent large deposition of material and abrupt change in velocity should be avoided
Printing Process
- Clay Mix: %10 water by weight to ensure consistent print between 4 to 6 bars pressure
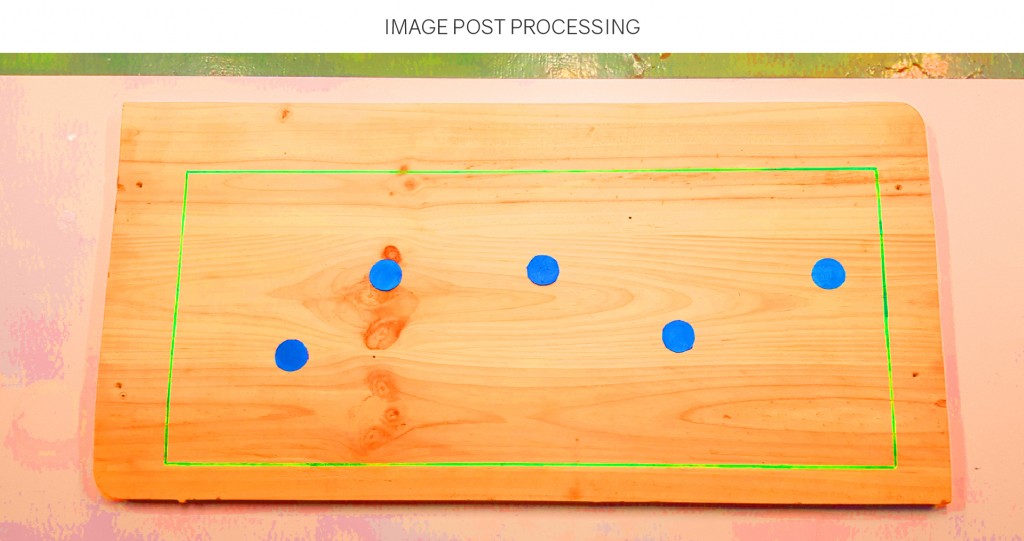
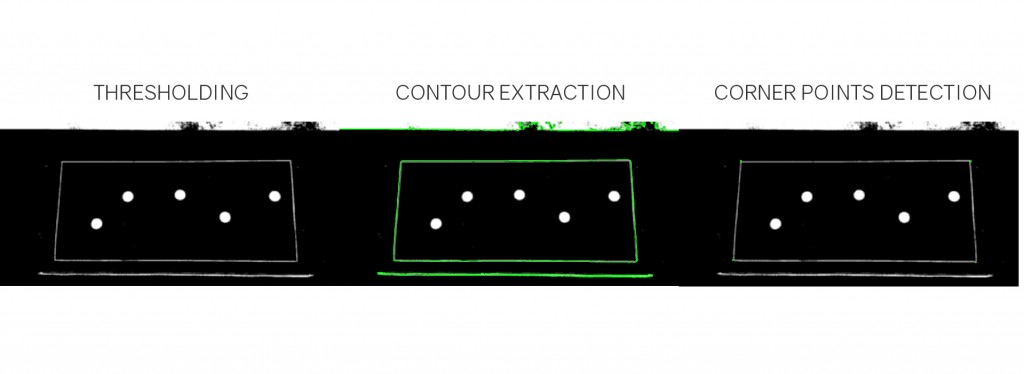
- Run scan of the board to identify the position of reinforcement using computer vision
- Run pre printing laser scan to configure error correction and final location of the reinforcement
- Run print