In this project a controller was developed for Parrot bebop II drone, in order to navigate autonomously to the users desired locations and collect data from the environment, such as object recognition, photogrammetry, etc.
The following diagrams show the workflow of the project and more specifically, the workflow of controller.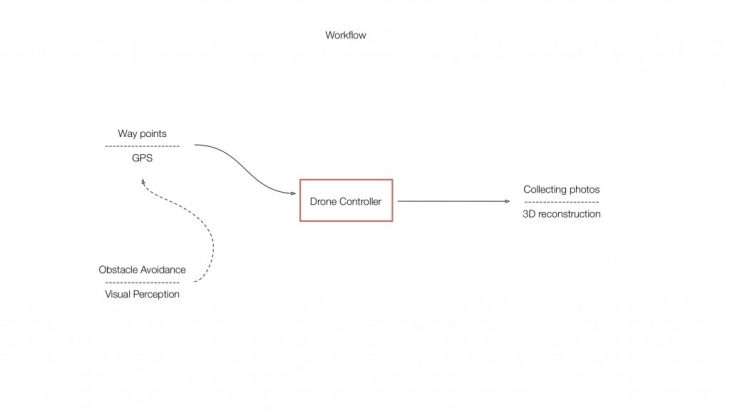
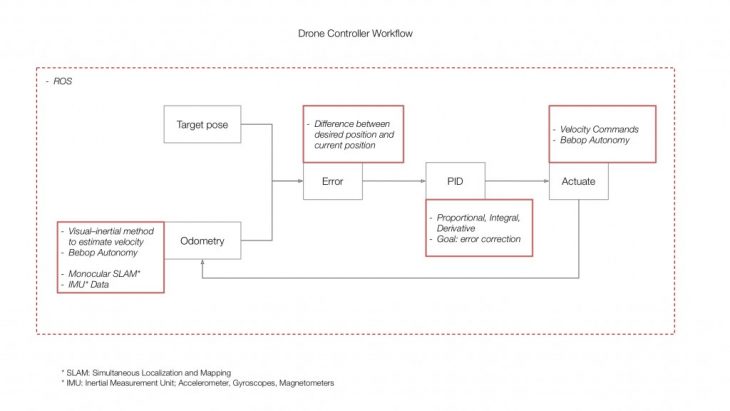
Different Odometry methods was tested for this controller:
- Bebop visual-inertial odometry
- ORB SLAM
- LSD SLAM
The controller computes the error between odometry and desired position, and corrects the error with a PID controller.
Through Bebop-Autonomy driver for parrot bebop, it activates the drone to move towards desired position.

Here is a video of the final test:
Students: Soroush Garivani, Jean-Nicolas Dackiw, Andrzej Foltman, Filip Bielicki
Tutors: Daniel Serrano Lopez, Starsky Lara
SOFTWARE II SEMINAR | MRAC 2018-2019