LASER DRONE
The objective of this project was to get a monocular quad copter to align to ARuco markers and reference its position and vectors using the camera sensors and reference position alignment in space. We created a PID algorithm that checks and corrects vector alignment error.
Challenges :
- Some documentation might be outdated and not maintained anymore.
- Difficulties installing libraries and maintain compatibility.
- Ubuntu breaks easily and adds difficulties on driver installation
- Most instructions are just understandable with experience with Ubuntu and ROS.
Sequence Diagram :
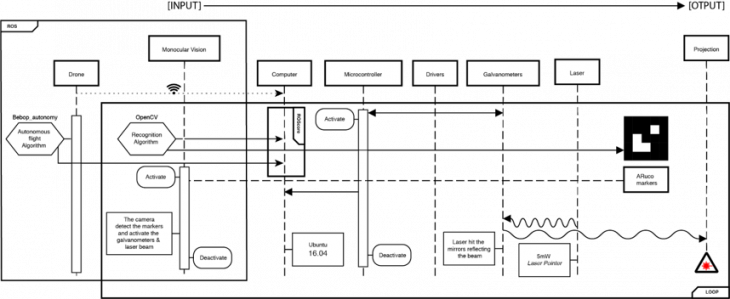
Results :
- Control the Drone with the keyboard
- OpenCV Edge detection
- OpenCV-Extraction red light from the camera in order to measure the pixels
- ARuco-Marker Detection with Bebop Camera
- Realignment of a Pan&Tilt system with laser projector to the ARuco marker
Description of the solution :
Parallel alignment allows better flexibility aligning to the orientation constraints, by detecting the normal vectors and align to the surface to obtain a better sharpness of the projection, maintaining an optimal focus in the laser.
This simple solution, is a first step to achieve better object recognition and obstacle avoidance.
Learned Topics, used technologies or algorithm used :
- Ubuntu OS environment.
- ROS basics.
- Terminal Operations and jargon.
- Computer Vision basics: Opencv: 1. Camera Calibration a. Marker Detection & b. Distance Recognition 2. Edge Detection
- G-Code to HEX-Code for Cartesian projections.
- Tests of calculating the distance with OpenCV with the projected laserlight
Application :
For the construction industry there are many possible applications for this idea. First of all you can project AR for a bigger group of people on building site to visualize a floorplan, building informations or simple measurements without the need of expensive AR-Glasses for every single persons.

Image : Shape Projection
Next steps:
- Have the alignment algorithm fully working.
- Combine laser implementations with the monocular camera vision of the drone.
- Have a SLAM implementation in the node.
- Laser scanning & Object Recognition
- Obstacle Avoiding & Distortion Correction
Potential Improvements:
- Create a dynamic range of projections working in combination of the object recognition and possibly with BIM.
Laser Drone is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction (M.R.A.C.) in 2019 by,
Student: Subhash Prajapat, Stefano Meloni, Sebastian Voigt, Luis Pacheco
Faculty: Daniel Serrano & Jose Starsk Lara