This project explores the intuition of muscle memory with hand movements and finger gestures through robotic interactions to provide opportunities for craftsmen and laborers to replicate handcrafts in large scale design processes.
</p>
FRAMEWORK

Focusing on activities that are carried out by hand such as texturing, carving and painting, the vision of ROBOMANO was to create a synergy between the human and the robot. Extracting the fluidity and emotion from the human tasks and replicating these motions using the robot in a back and forth relationship between man and machine. Through this project, we foresee an increase in productivity for labor intensive design processes.
INTERFACE
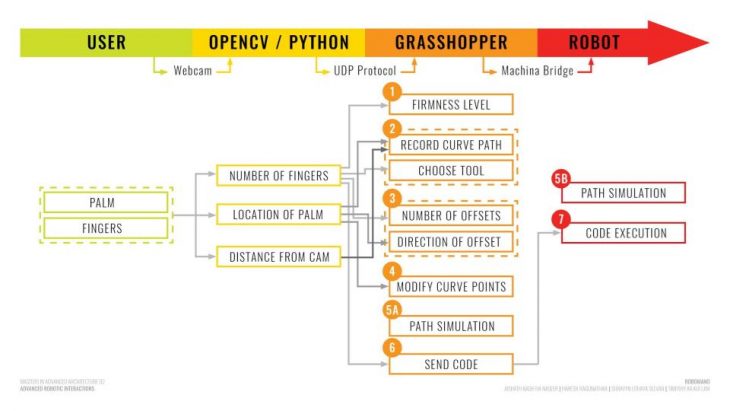
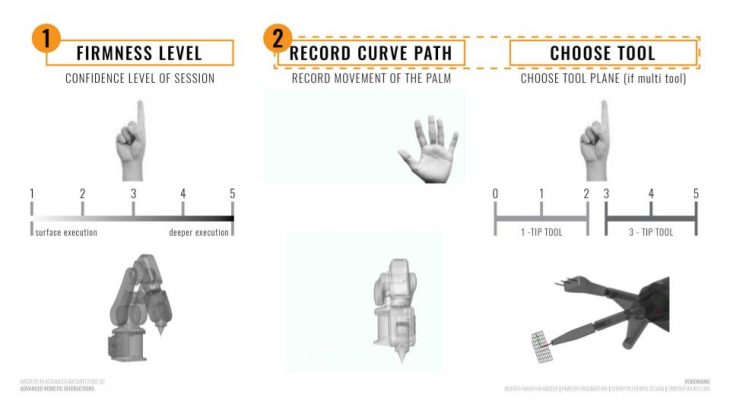
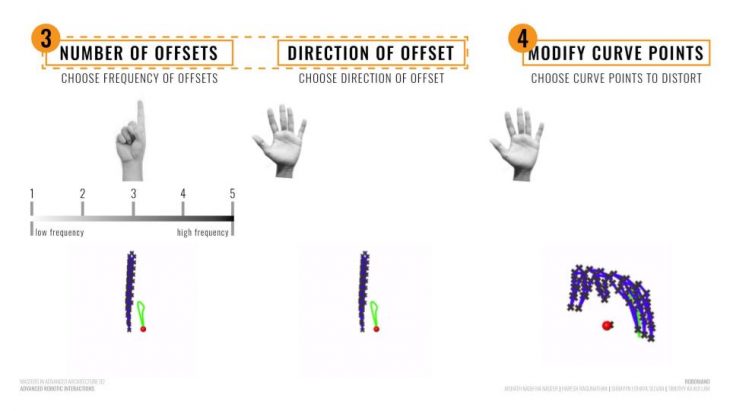
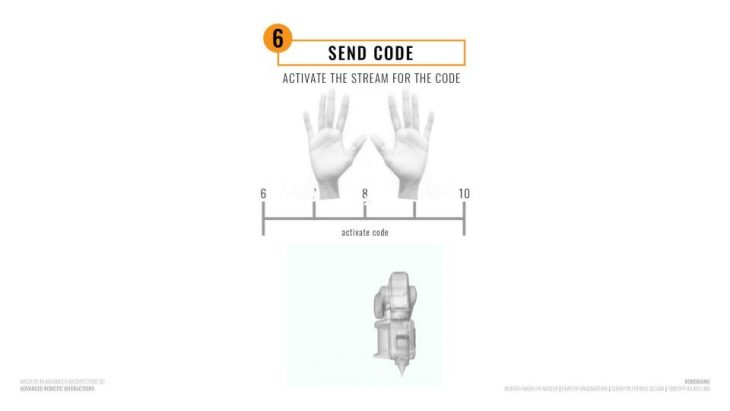
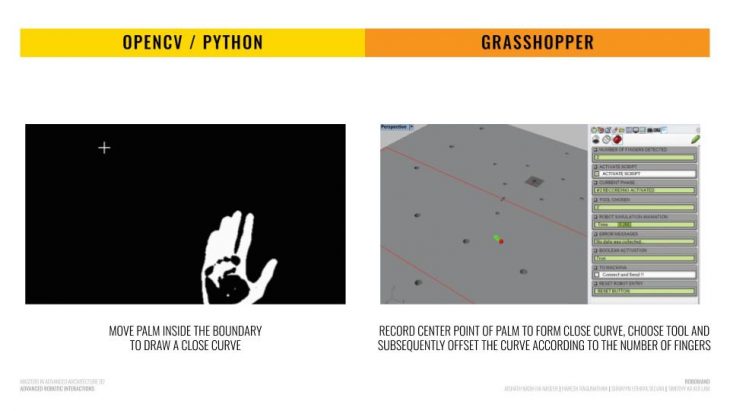
Using visual feedback from the user’s hand, an OpenCV for python code is able to extract data such as the number of fingers, location of palm and the distance from the cam to inform design decisions before sending it to the robot through machina bridge. The data is as follows:-
SANDBOX PROJECT
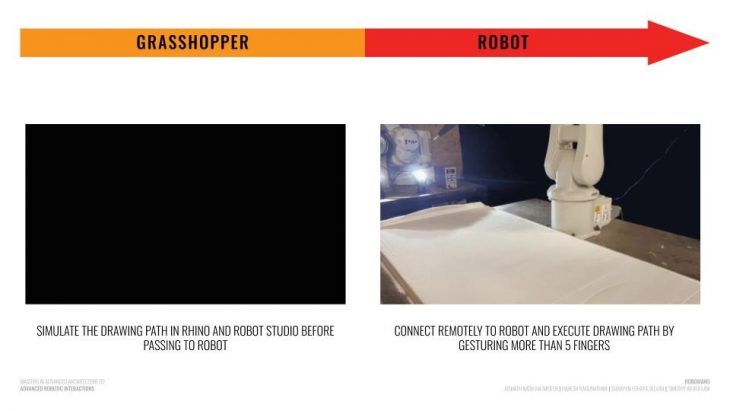
With the context and constraints of the Post-COVID strategy for the seminar, a sand box set up is used to execute our project strategies. Here is the process executed with the SANDBOX project context:-

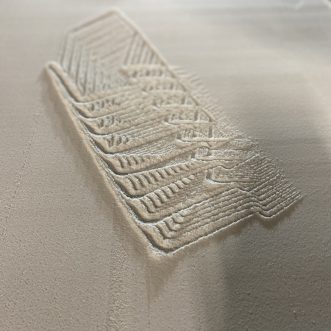
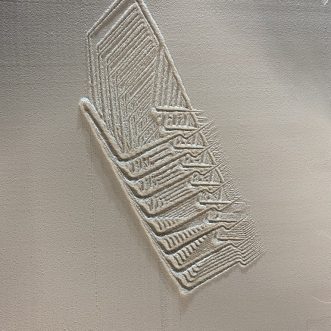
RESULTS OF SAND PATTERNS

HOW DO WE FORESEE THIS PROJECT?

We envision artisans and laborers using personal camera devices to record and identify their movements that would be executed by the robot in large scale developments. This would present these artisans and laborers with a new tool to develop their skills and crafts through the fluidity of their movements and the potentials of a robot.
REFERENCES
Chen, Y. C. ( July 2019). Opencv to grasshopper. Retrieved from
Ilango, G. ( April 2017 ). Hand gesture recognition using python and opencv – part 1. Retrieved from
https://gogul.dev/software/hand-gesture-recognition-p1
Ilango, G. ( April 2017 ). Hand gesture recognition using python and opencv – part 2. Retrieved from
https://gogul.dev/software/hand-gesture-recognition-p2
ROBOMANO is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at the Master in Advanced Architecture in 2020 by:
Student: Aishath Nadh Ha Naseer, Haresh Ragunathan, Surayyn Uthaya Selvan and Timothy Ka Kui Lam
Faculty: Alexandre Dubor, Kunalijt Singh Chahdha and Angel Munoz
Software: Rhinoceros 3D, Grasshopper 3D, Robot (GH Plugin), Machina Bridge, ABB RobotStudio, OpenCV
Hardware: Remote Laptops, Camera, ABB Robot, Router, IP Camera
A special thank you to the author of Machina Bridge, Jose Garcia del Castillo, for providing us the opportunity to realize this project.
