COMPUTATIONAL DESIGN FOR ROBOTIC FABRICATION
PICK CUT AND PLACE
ASCEND
This project looks at robotic fabrication using the KUKA PRC robot as a design tool for construction . A design methodology of a ‘pick, cut and place’ is explored, using wooden elements of a cross sectional dimension of 45 x 45 mm. Notions of stacking, rotation and stability are tested to develop modules implementing this method.
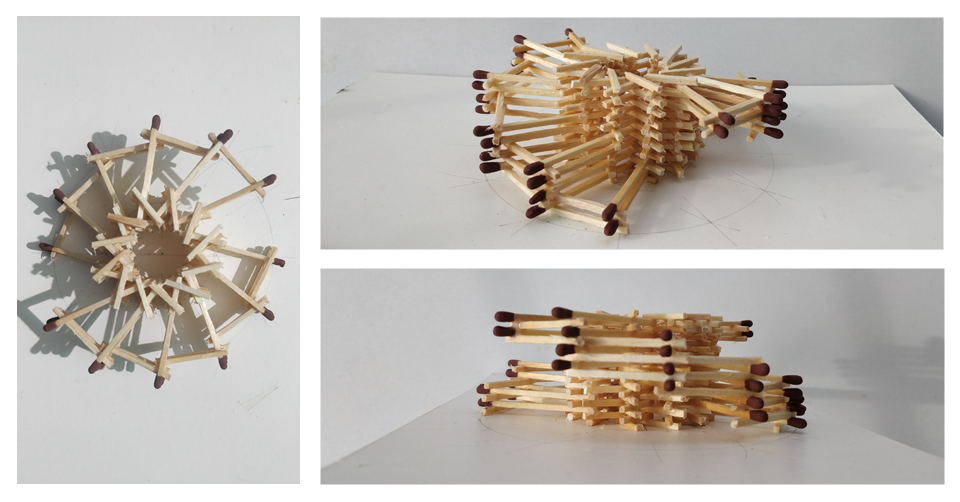
By a combination of robotic simulations and physical models, a system for aggregation is developed following the explored principles.
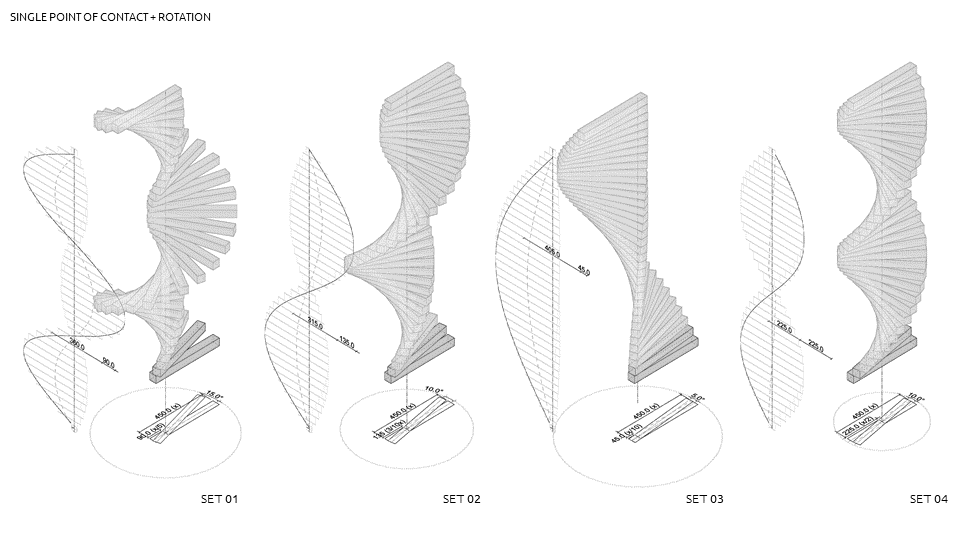
EXPLORATION 01 ROTATION
- The more the angle of rotation from the axis less stable the structure is.
- More surface area in contact makes it more stable
EXPLORATION 02 STABILITY
- The module is more stable with increase in number of points of contact
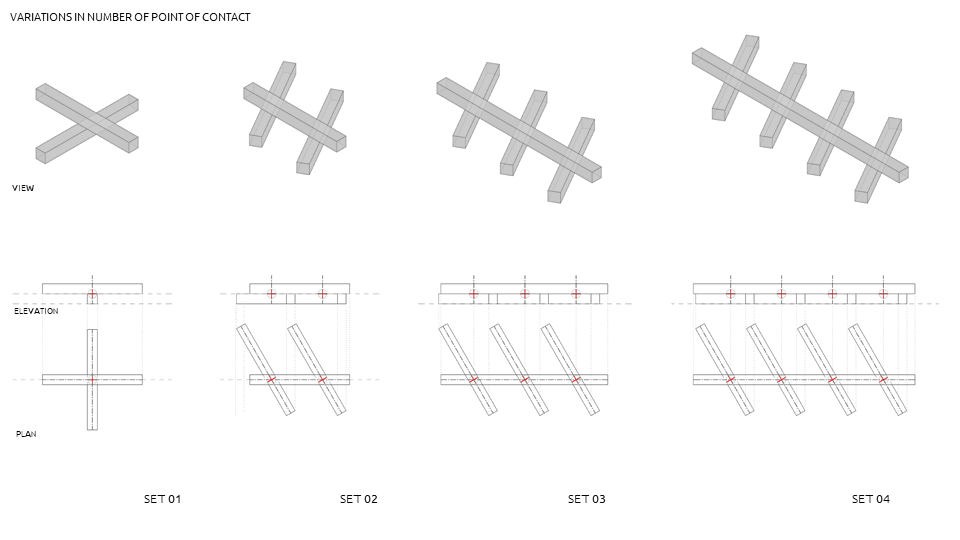
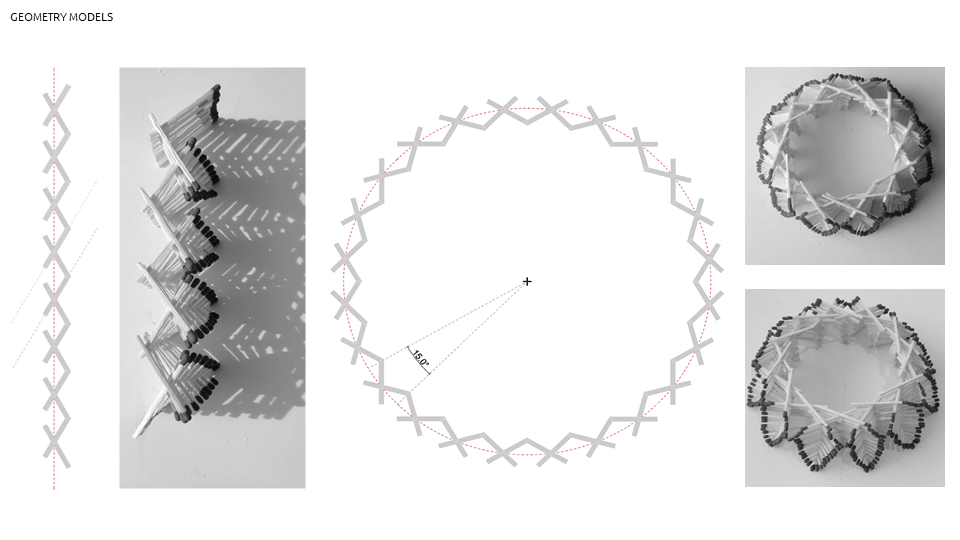
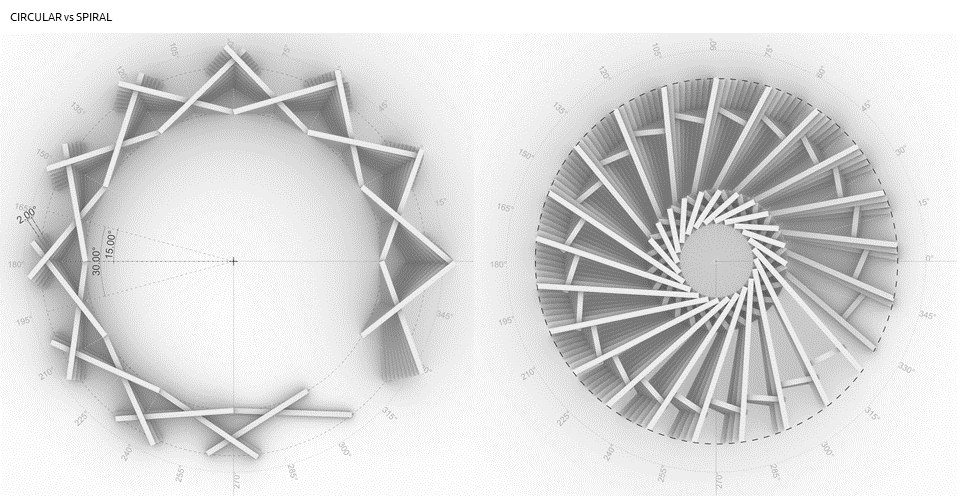
EXPLORATION 03 GEOMETRY
- Having two contact points make the the structure stable.
- More the polar angle more number of overlaps between two layers
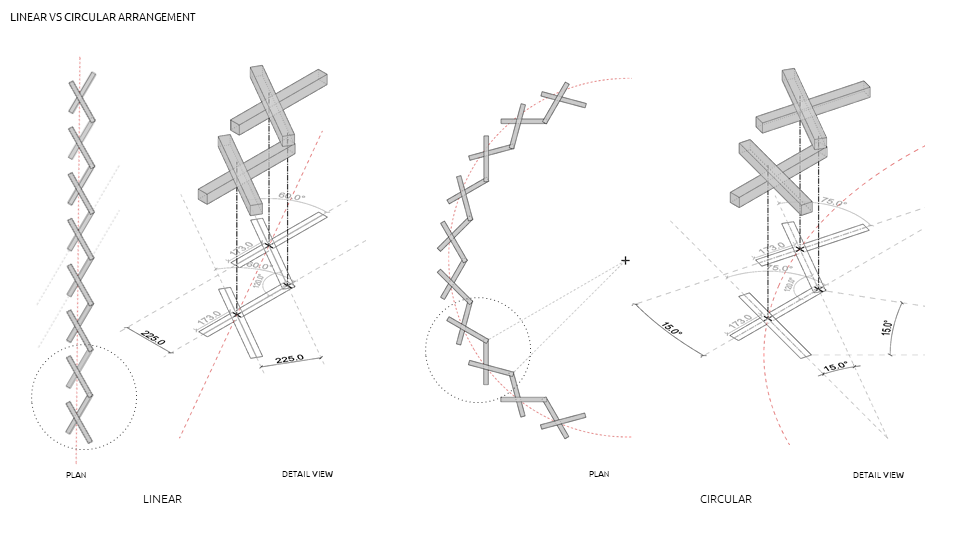
- Circle provides a closed loop which does not need extra elements in structure
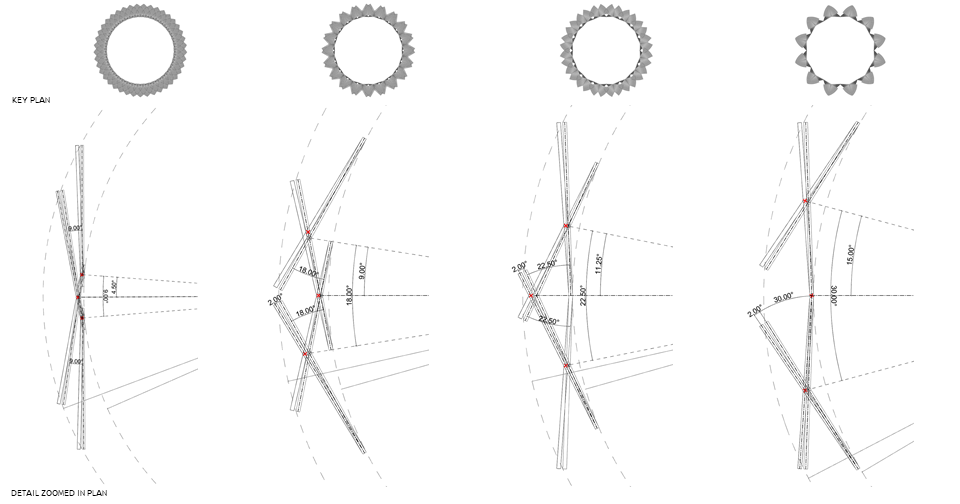
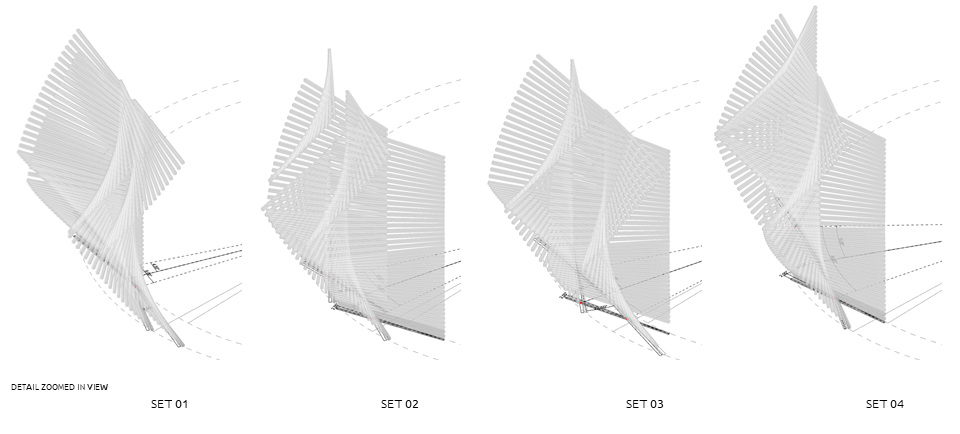
EXPLORATION 04 FORM
- Changing polar angle of rotation and distance between the sticks creates different patterns
- A 2 degree increase with each stacked layer creating a twist as it rises

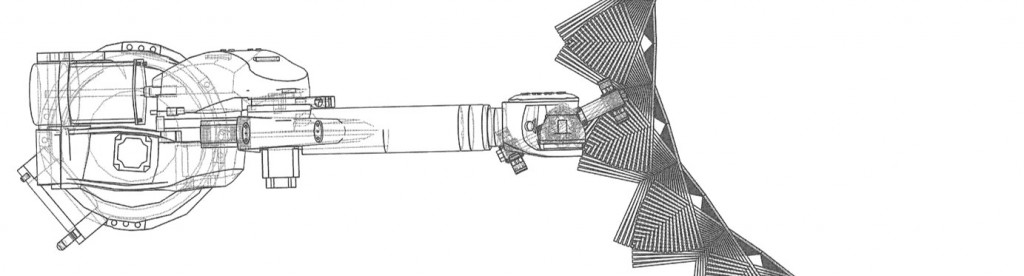
ROBOTIC SIMULATION MODULE

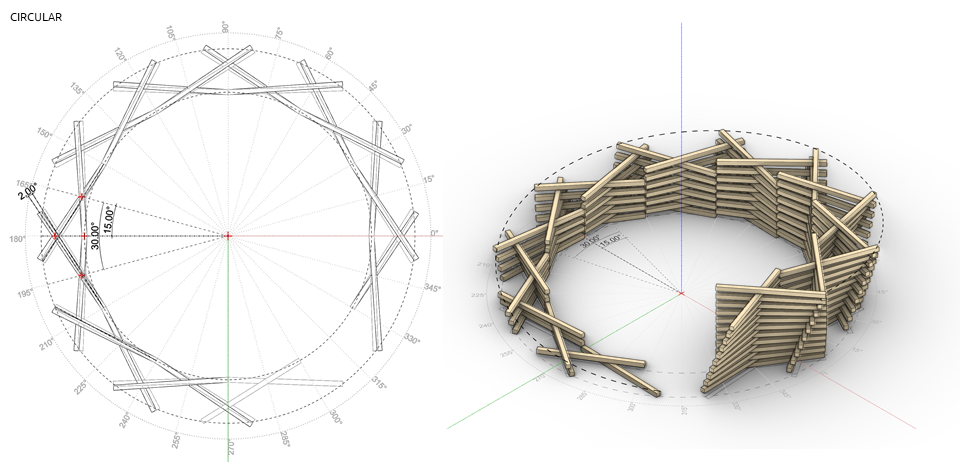
EXPLORATION 05 ARCHITECTURE
Circular ascending structure
- Levels are at different angles making addition of surfaces irregular
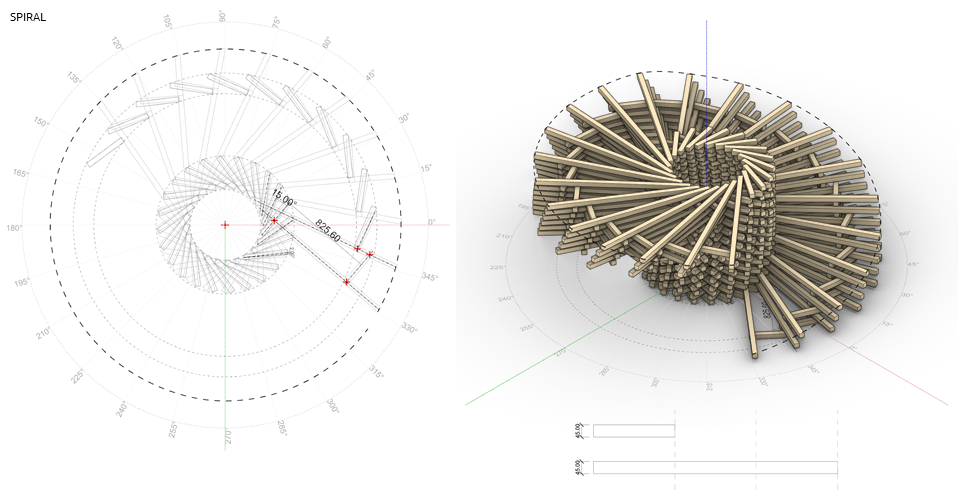
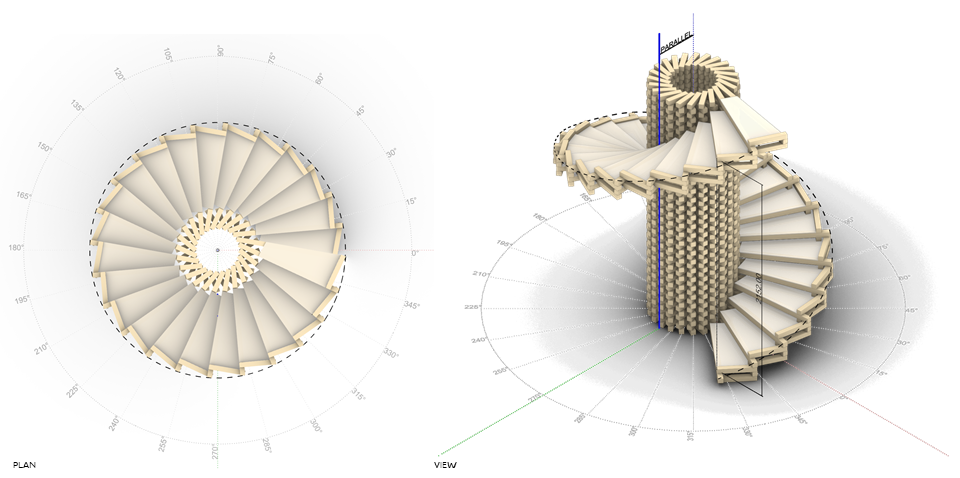
Spiral Ascending Structure
- Addition of central core gives stability to system
- Requires variation in lengths of components to achieve this geometry
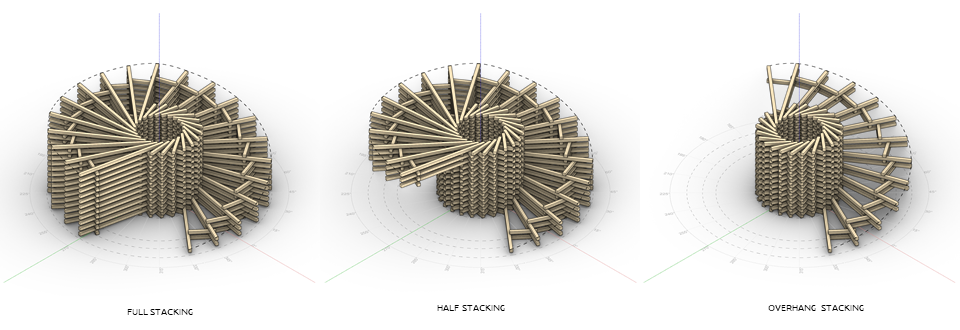
Variation in Stacking Criteria
The overhang system is lighter, requires less material and is more elegant, but will require additional temporary supports
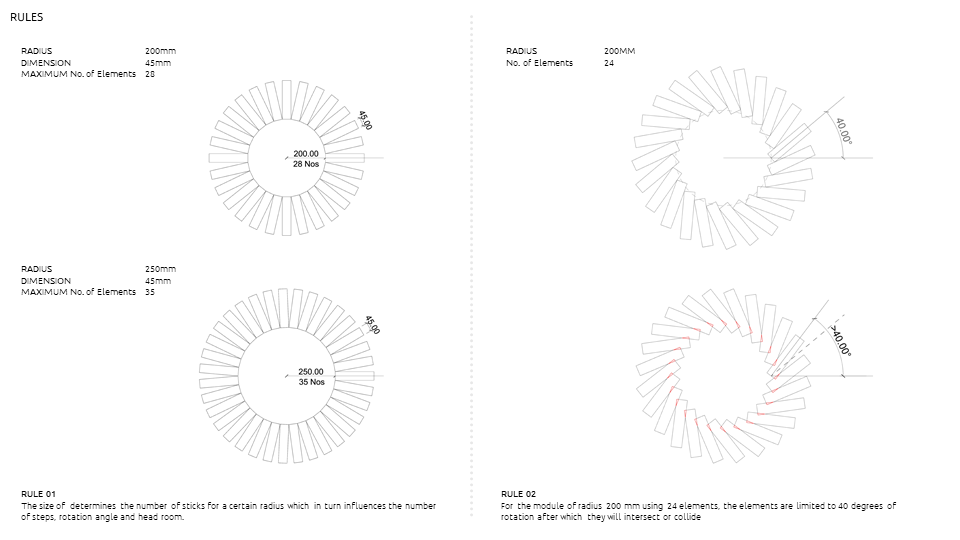
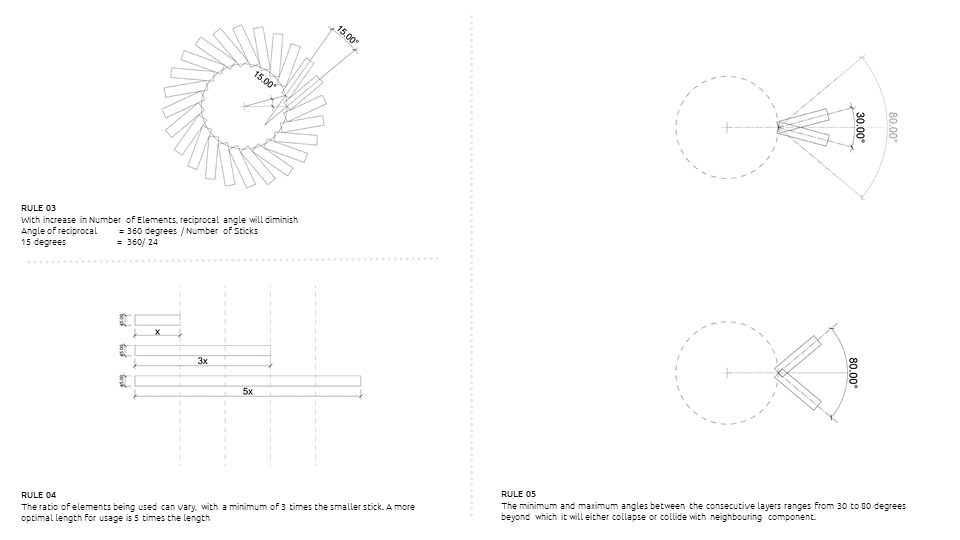
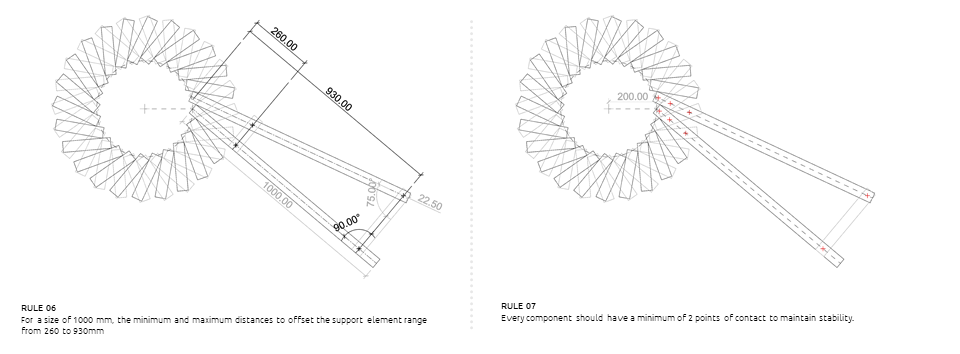
RULES
The rules and conditions that determine our module development are as follows
DETAILS
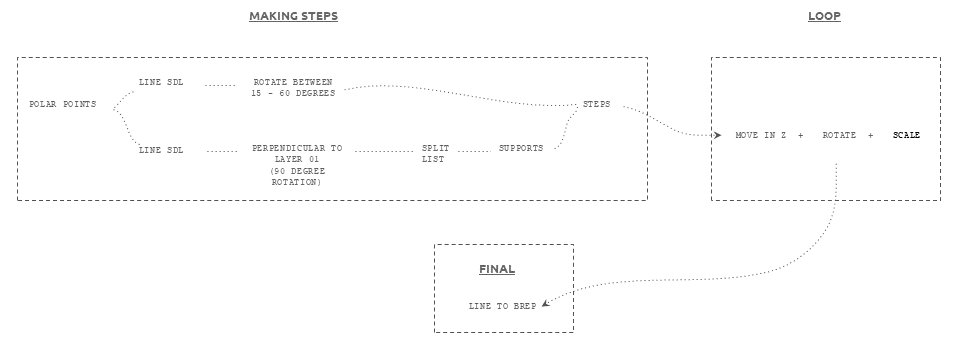
PSEUDO CODE
FINAL DETAIL
This module is optimized based on size of elements and staircase norms. Using a maximum length of 1000 mm, a usable spiral staircase can be derived. The outcome is a customized staircase, with variations in the center of mass and polar curve paths.
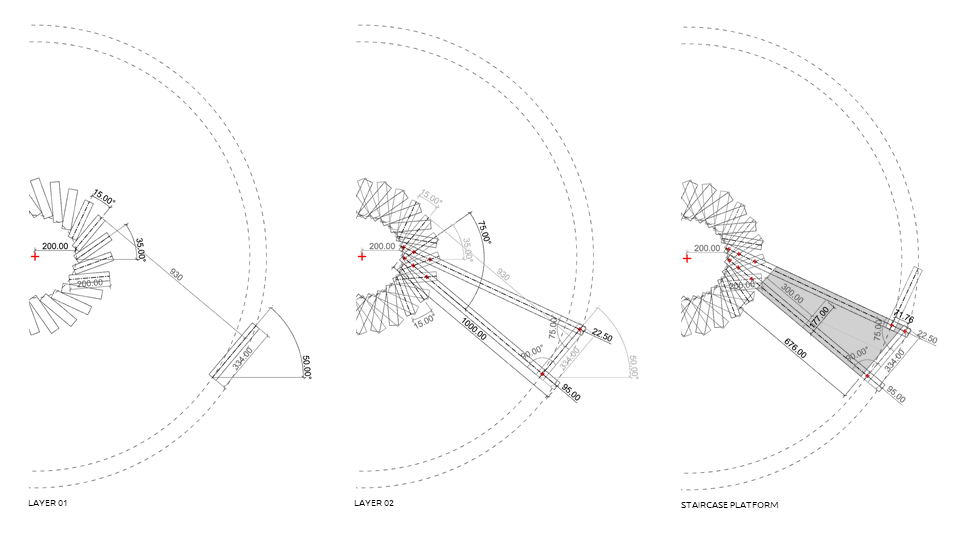
Aggregation by alternating rotated stacking.
ITERATIONS
A catalogue based on variations in central axis polar curve, and center of mass are developed.
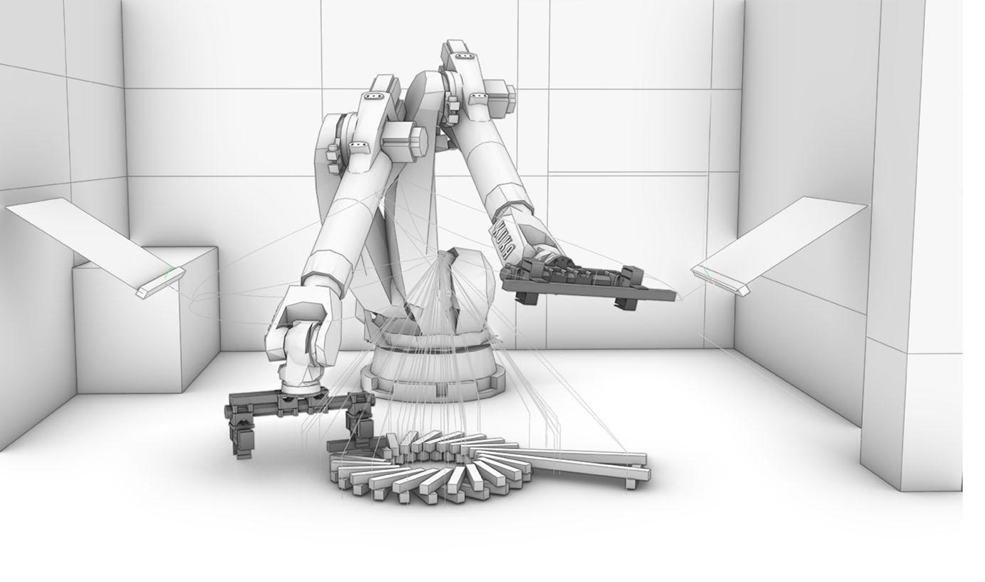
ROBOTIC SETUP
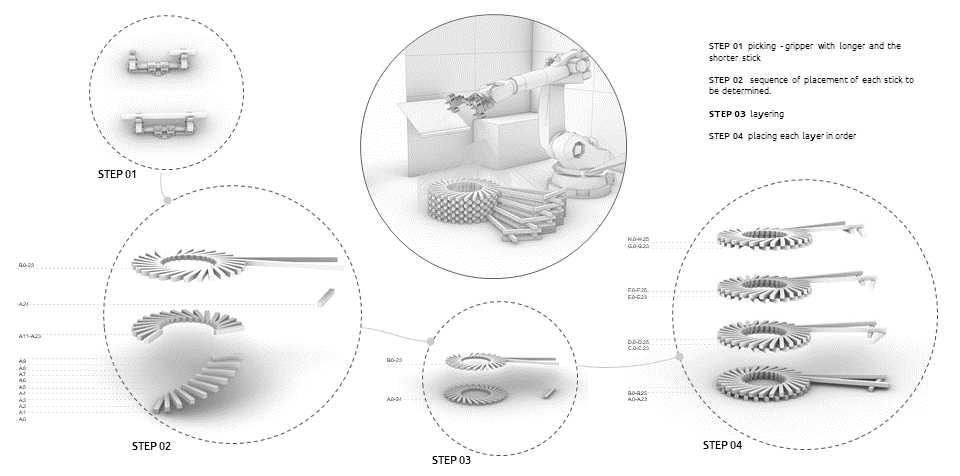
OPTION 01
- Pick and place setup using 2 feeder tables with different size elements on each.
- One whole step ( 2 layers of stacking) is assembled by the robot individually before being stacked as a whole.
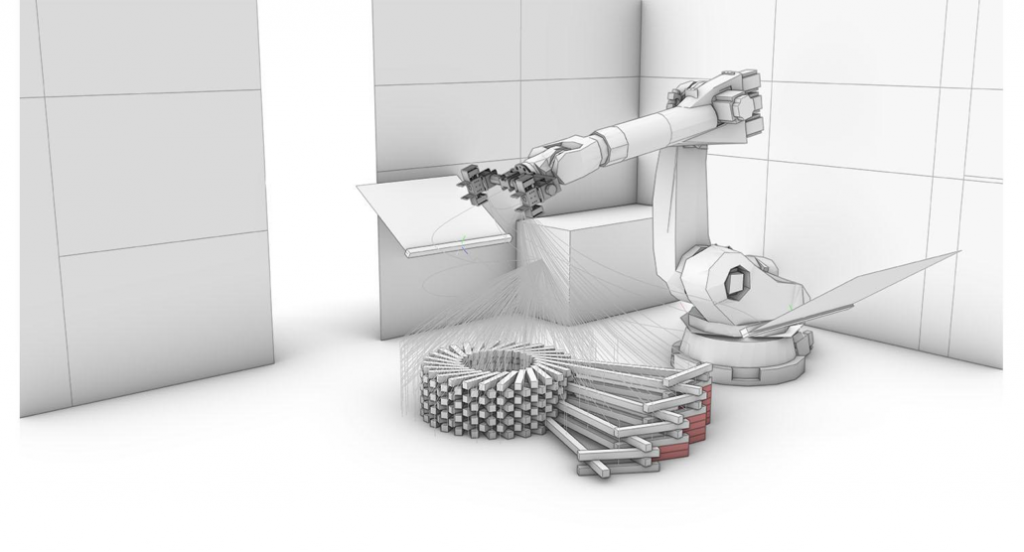
OPTION 02
- Pick and place setup using 2 feeder tables with different size elements on each.
- Continuous stacking process with addition support for stacking.
ARCHITECTURAL APPLICATION VISUALIZATION
The final system developed can be used for various architectural applications that entail vertical development at different scales.



‘Ascend’ is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the MAA01 2019/20 by Students: Madhavi Ojha, Poojitha Tadshina Reddy and Faculty: Alexandre Dubor, Ricardo Mayor