Our approach was to create 5 large circles and to connect them to the base using a simple peg-like joint which could be moved around in our experiments and fixed for presentation. With a focus on the transition between 2 dimensional and 3 dimensional space, the intention was to create a sphere-like object out of circles that could be manipulated by a central ring through which they were threaded, and distorted by changing of their diameters.
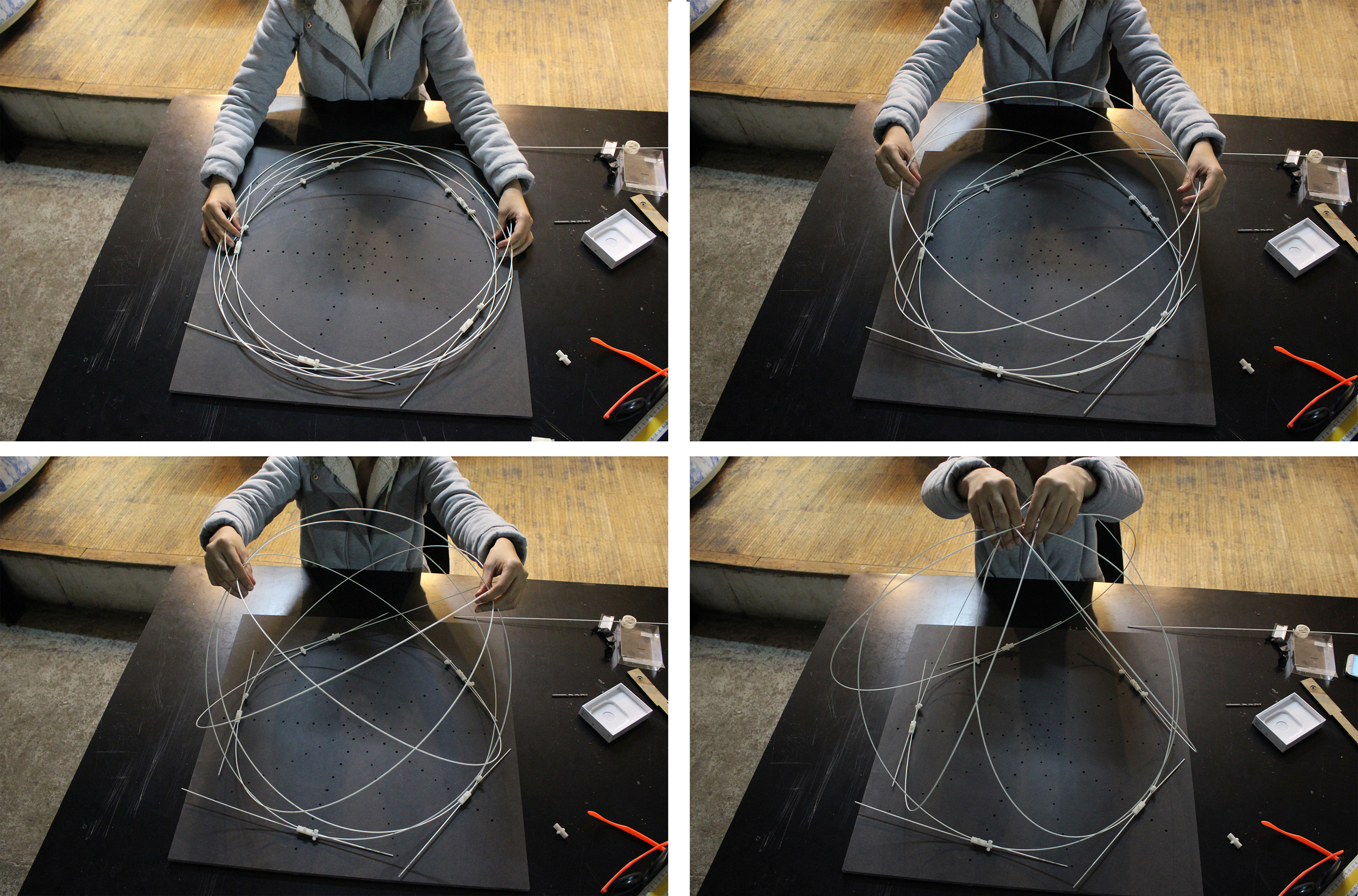
 we made a conscious decision to eliminate the need to deal with the ends of the rods, as the capacity for the plastic rods to rebound out a secure position was too great. Thus, we instead designed joints which we could feed the ends of the rods through, creating a relatively strong connection through friction which was still loose enough to allow for the pulling of the ends and the tightening of the loops. In testing our joints we bore holes into the base in a pentagonal radial grid so that we could have the regularity of a pentagonal alignment, and we achieved a number of formations which reflected our initial intent, but the circular ring joint was not as easy to move. Without the ring we created two movements (pictured), but the other joints and our base treatment afforded us more flexibility to experiment further with different formation that could be more dynamic and fun.
we made a conscious decision to eliminate the need to deal with the ends of the rods, as the capacity for the plastic rods to rebound out a secure position was too great. Thus, we instead designed joints which we could feed the ends of the rods through, creating a relatively strong connection through friction which was still loose enough to allow for the pulling of the ends and the tightening of the loops. In testing our joints we bore holes into the base in a pentagonal radial grid so that we could have the regularity of a pentagonal alignment, and we achieved a number of formations which reflected our initial intent, but the circular ring joint was not as easy to move. Without the ring we created two movements (pictured), but the other joints and our base treatment afforded us more flexibility to experiment further with different formation that could be more dynamic and fun. 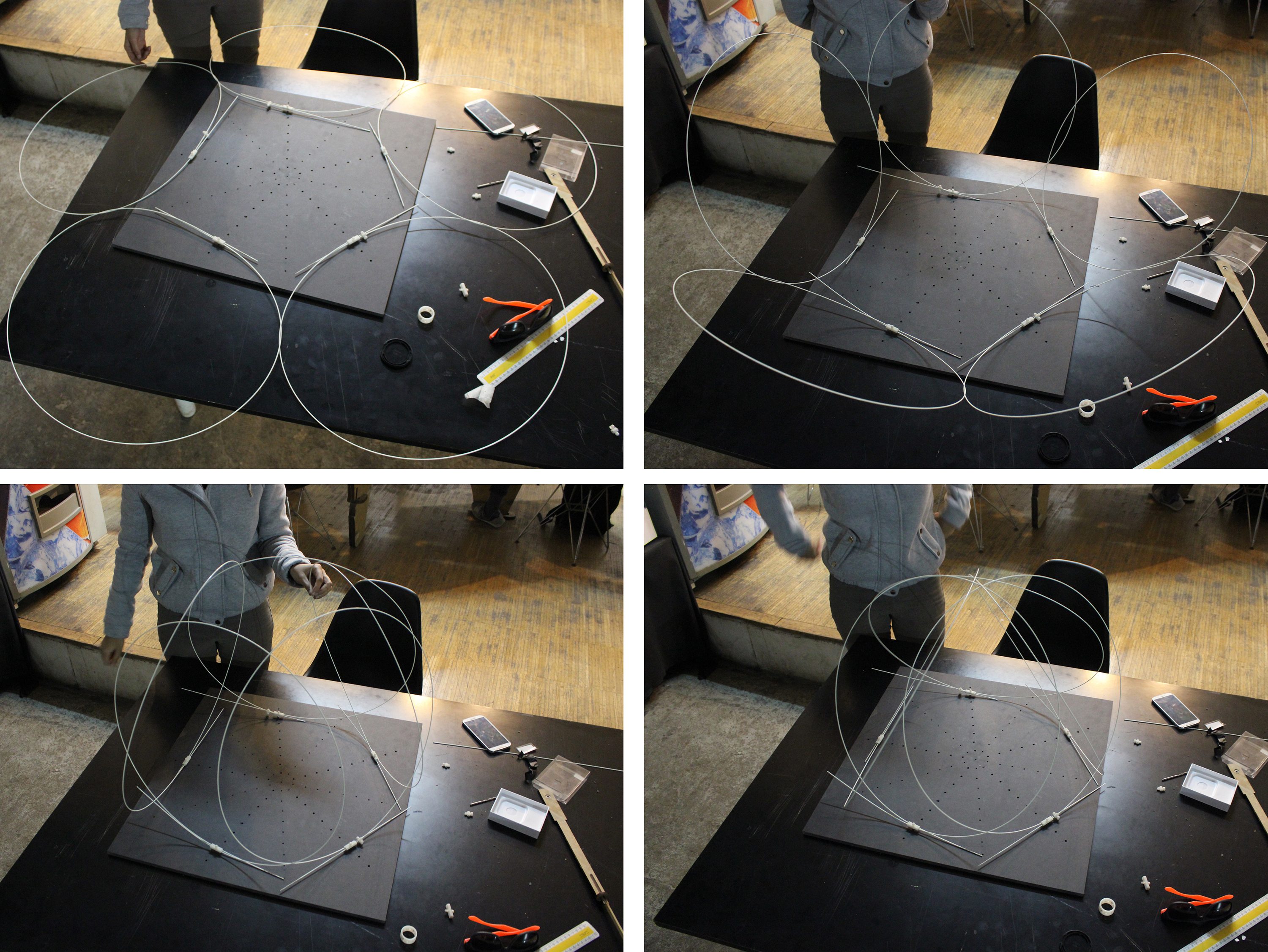

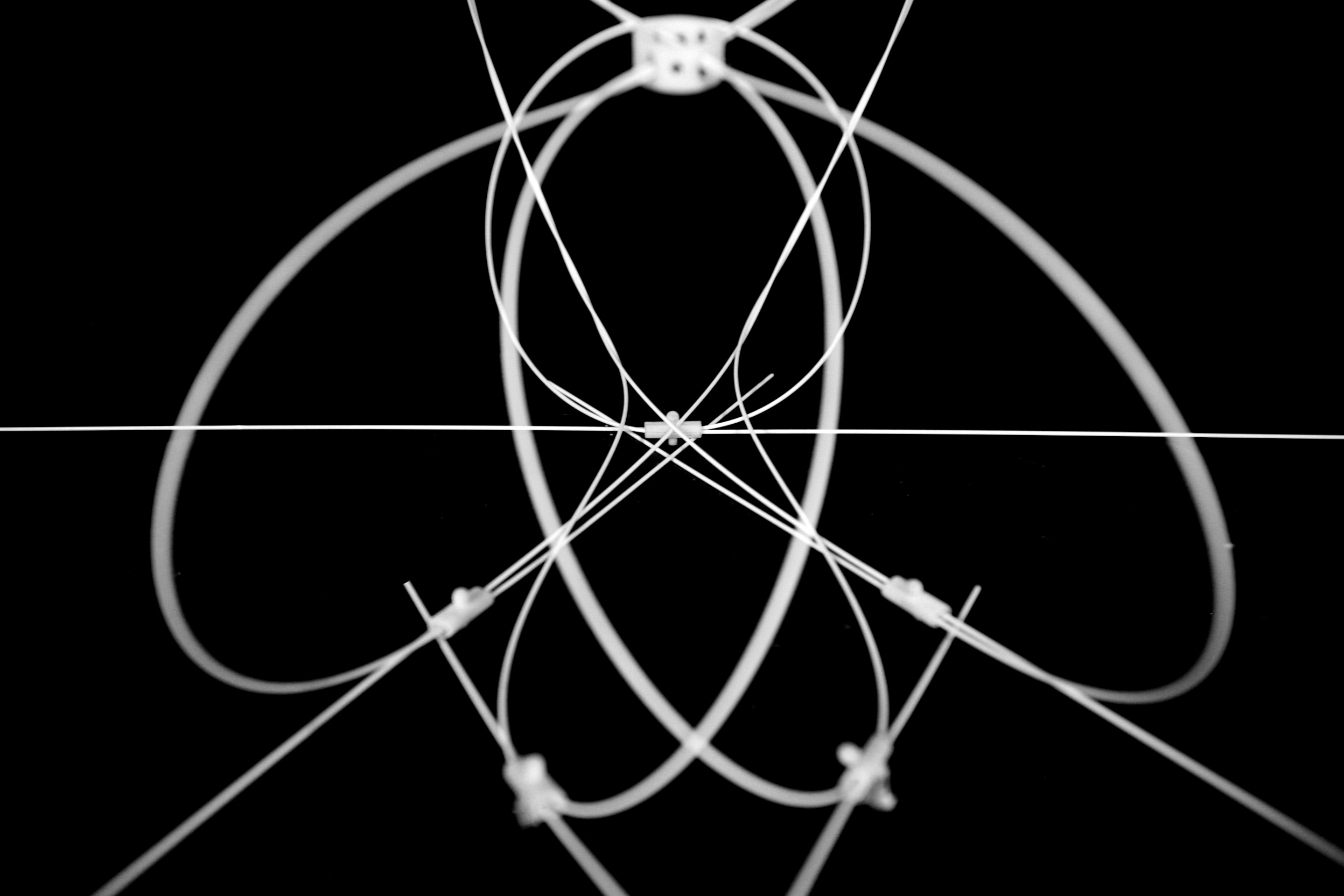
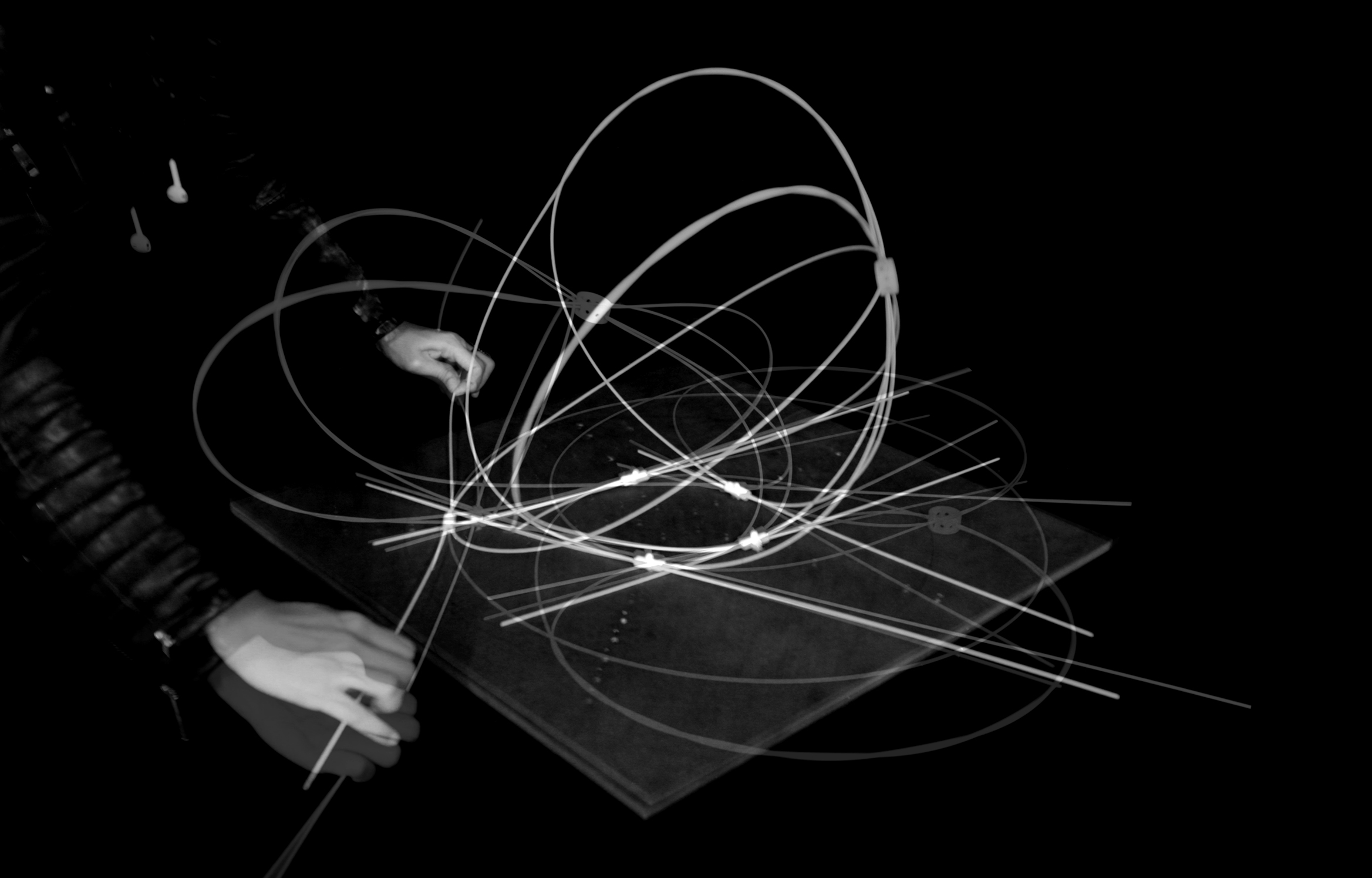
The product is the result of our experiments with different configurations on the base and different levels of interation between the circles. Linking and twisting them together counteracted the rebounding forces of the rod and reduced the number of counteracting angles threading through the central circle. As a result we achived assisted movement from 2d to 3d using the ring as a control point. As this movement involves only four rods, the 5th is introduced as a control device activated by tightening of the circle.
(Click to see animated gif. of the movement)
(Click to see animated gif. of the movement)
(double click to animate!)