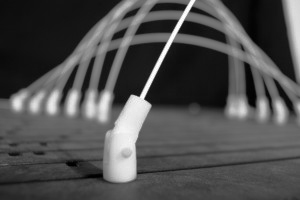
 Catenary curve is the curve that an idealized hanging chain or cable assumes under its own weight when supported only at its ends. While freely hanging catenaries have more often than not elastic physical properties, we decided to explore the abilities of fiberglass rods acting as catenary arches, partially mimicking Gaudi’s research. Fiberglass rods, despite their small cross-sectional diameter, have an inherent ability to return to their original flattened state after mechanical deformation has been applied to them. Thus, to make this experiment possible we attempted to develop the above mentioned side supports of the arch and make them kinetics, to further allow unconstrained movement of the arch along its longitudinal axis. The most efficient mechanism that facilitates the “flattening” movement of the arch is the hinge-joint. Due to the high precision of the 3D-printing techniques we were able to create a kinetic joint that consists of a “plug-fork” element that fits into the base, a pin, and a top “hollow cone” element that houses one end of the fiberglass rod. The pin connection allows relative rotation of the two elements only along the axis of the pin-hole. The two holes of the “fork” and “cone” assembly are bolted and can be considered as fully constrained. Having an identical 3D-printed joint assembly at each end of the 30 cm long fiberglass rod allowed for a numerous number of designs and various configurations.
Catenary curve is the curve that an idealized hanging chain or cable assumes under its own weight when supported only at its ends. While freely hanging catenaries have more often than not elastic physical properties, we decided to explore the abilities of fiberglass rods acting as catenary arches, partially mimicking Gaudi’s research. Fiberglass rods, despite their small cross-sectional diameter, have an inherent ability to return to their original flattened state after mechanical deformation has been applied to them. Thus, to make this experiment possible we attempted to develop the above mentioned side supports of the arch and make them kinetics, to further allow unconstrained movement of the arch along its longitudinal axis. The most efficient mechanism that facilitates the “flattening” movement of the arch is the hinge-joint. Due to the high precision of the 3D-printing techniques we were able to create a kinetic joint that consists of a “plug-fork” element that fits into the base, a pin, and a top “hollow cone” element that houses one end of the fiberglass rod. The pin connection allows relative rotation of the two elements only along the axis of the pin-hole. The two holes of the “fork” and “cone” assembly are bolted and can be considered as fully constrained. Having an identical 3D-printed joint assembly at each end of the 30 cm long fiberglass rod allowed for a numerous number of designs and various configurations. 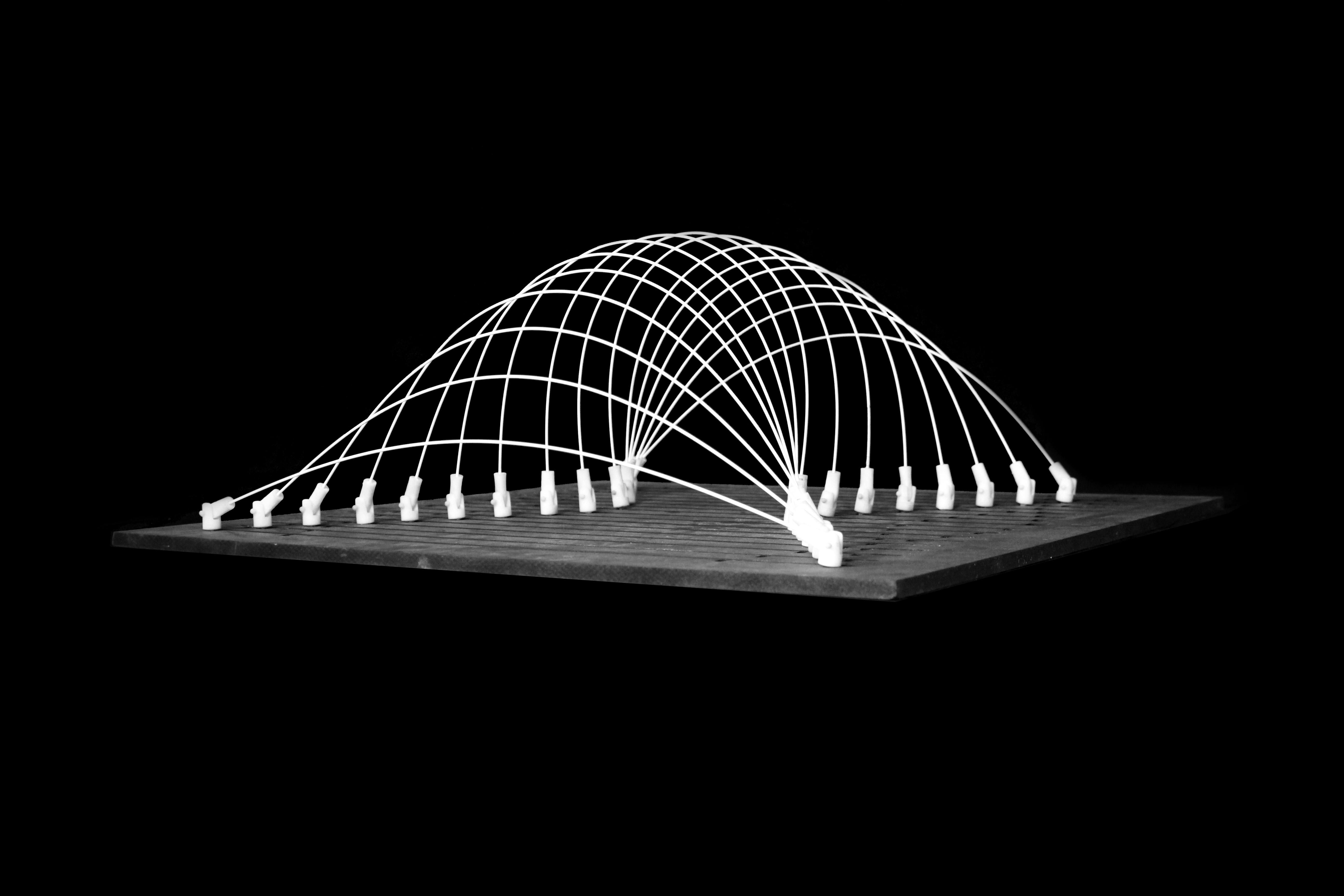
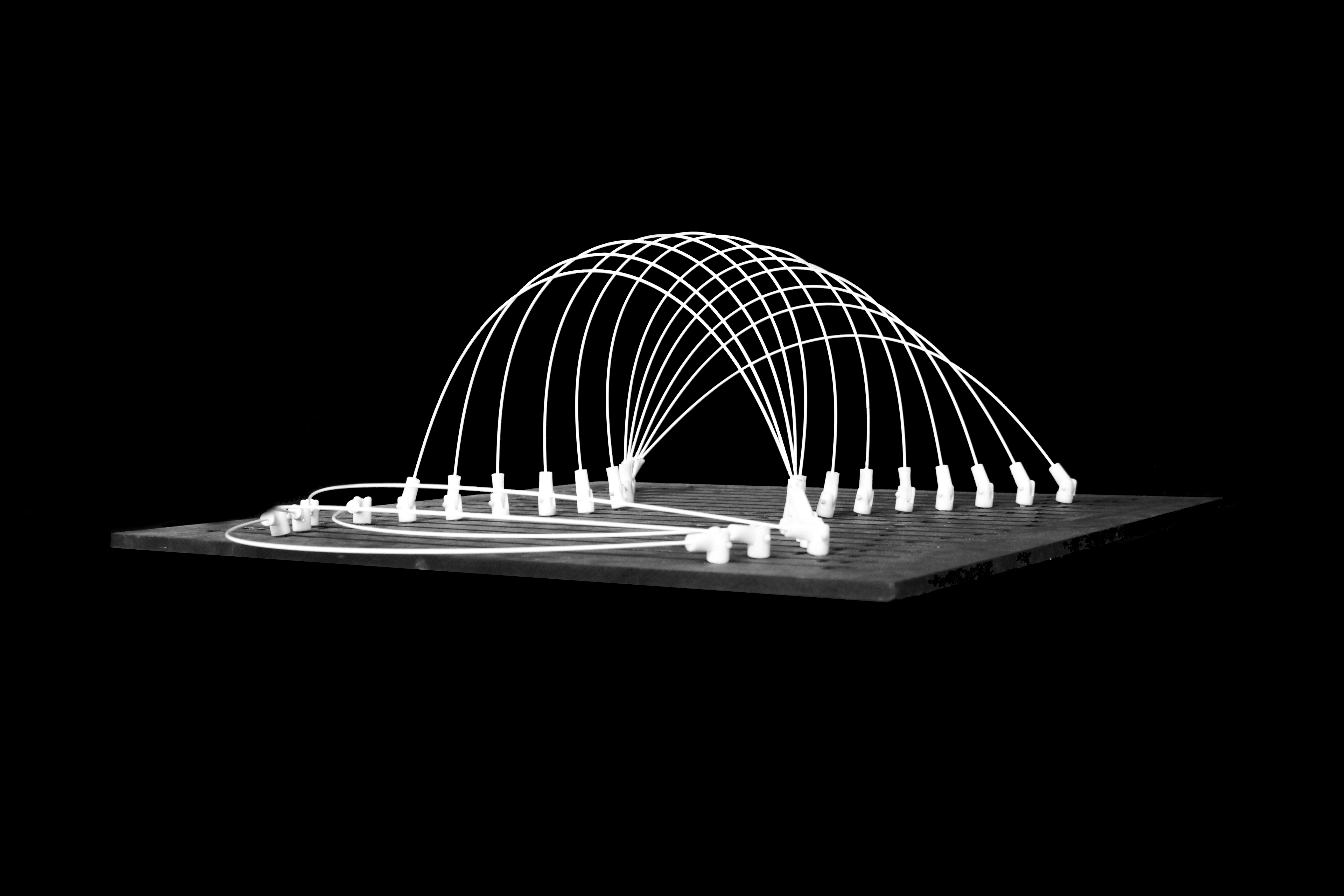
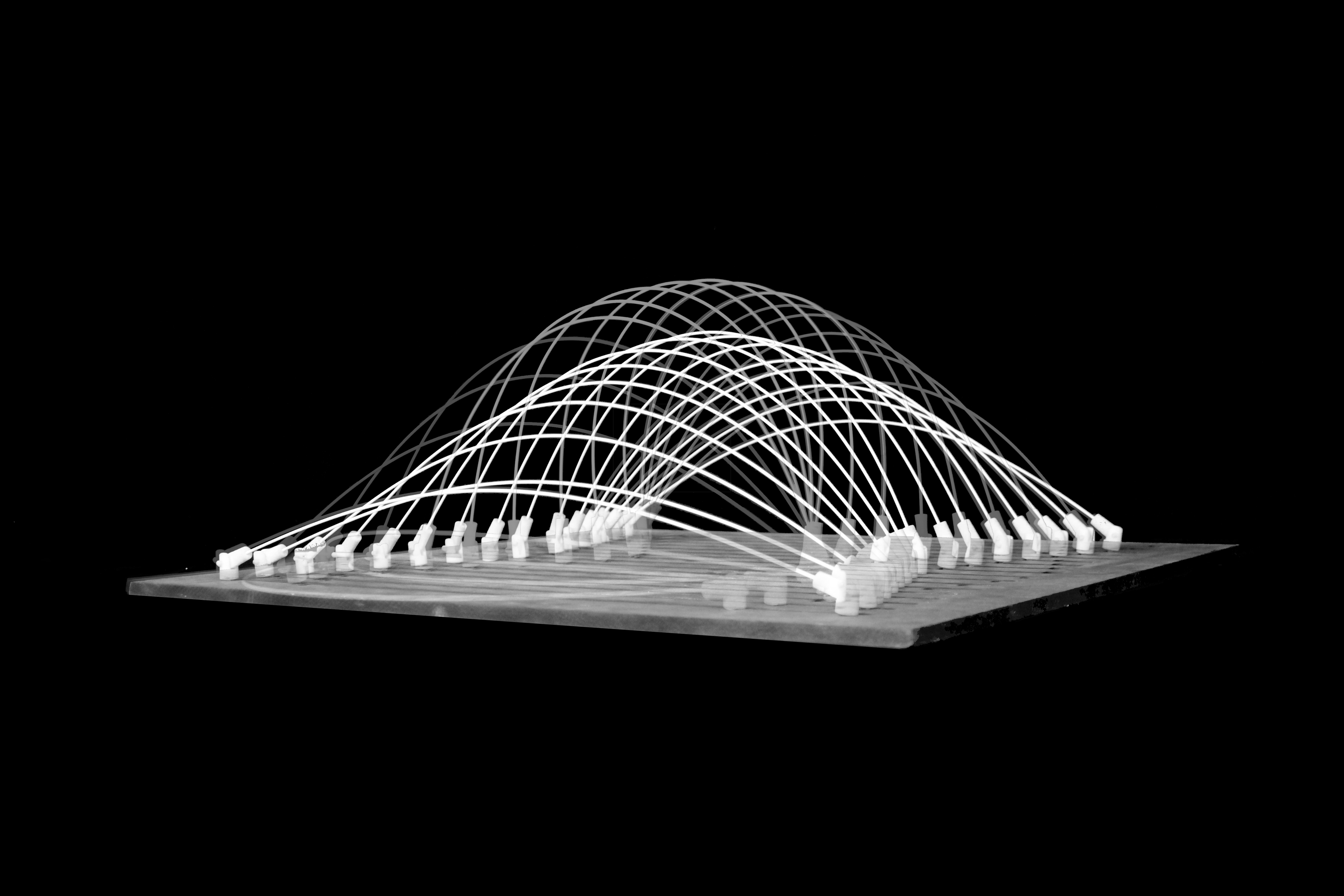
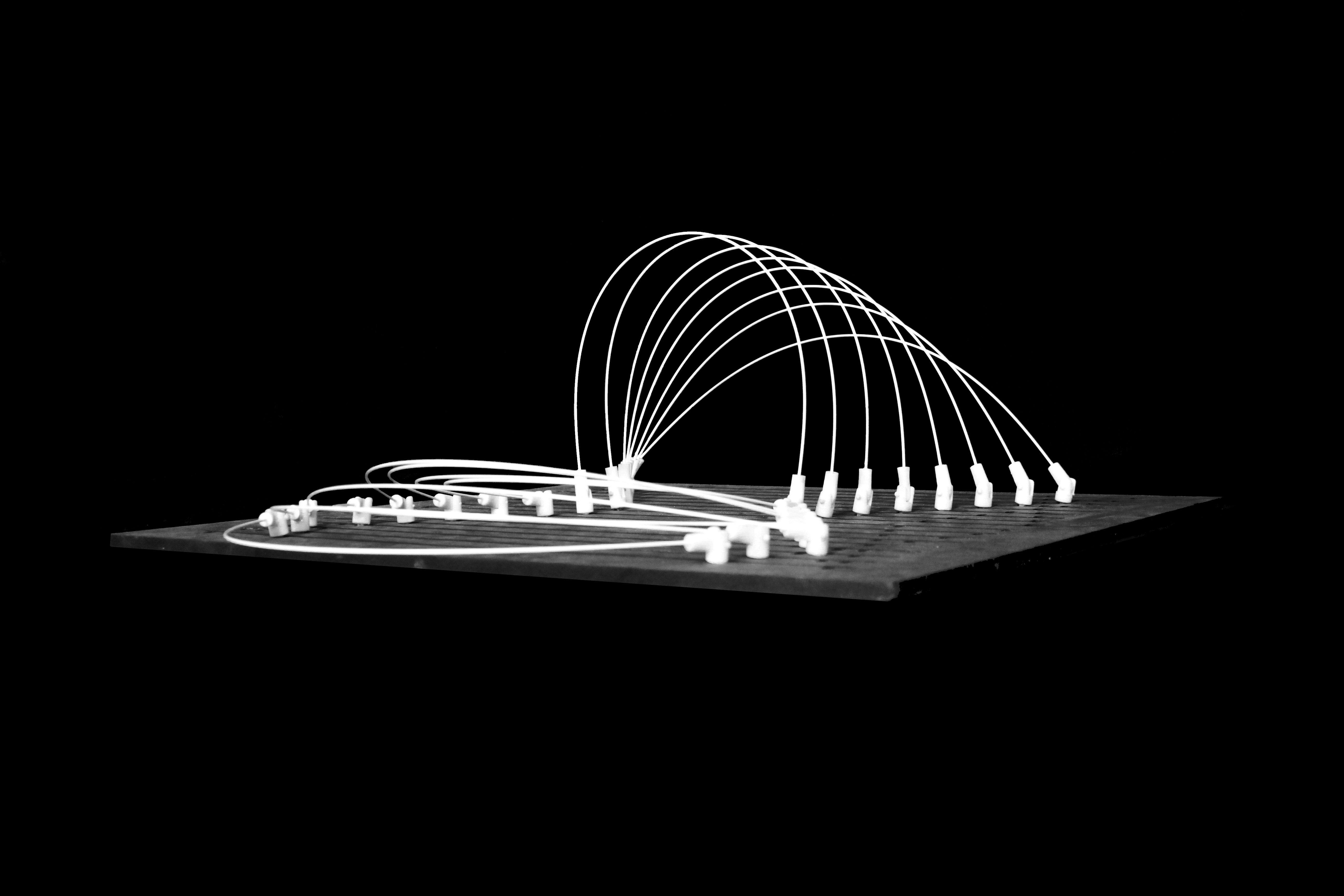 _STATE 01_ VERTICAL_all rods are in a vertical position. The bending degree of each rod is defined by the pre cut tracks and slots on the plywood base. A series of 18 rods takes on 3 degrees of extremes formed by the “colonnade” of catenary arches, each differing with vertical projection vector, while the number of rods remains the same. _STATE 02_ FALL DOWN_ all rods fall flat onto the board, following the domino effect. This motion is possible due to the hinge nature of the 3D-printed joints that serve as connectors between the rods and base. _STATE 03_ OVERLAPPING CATENARY_ this state emphasizes the elegant interweaving nature of the catenary arches when the hinge joint is being placed in every other neighboring slots rather than the one immediately next to it. Thus, we were able to explore the combination of both STATES 01+02, with an additional twisted fall down movement of the arch series. The grasshopper Catenary definition was used to simulate different configurations made possible by this component system of 18 rods and 36 joints – and a board with tracks!
_STATE 01_ VERTICAL_all rods are in a vertical position. The bending degree of each rod is defined by the pre cut tracks and slots on the plywood base. A series of 18 rods takes on 3 degrees of extremes formed by the “colonnade” of catenary arches, each differing with vertical projection vector, while the number of rods remains the same. _STATE 02_ FALL DOWN_ all rods fall flat onto the board, following the domino effect. This motion is possible due to the hinge nature of the 3D-printed joints that serve as connectors between the rods and base. _STATE 03_ OVERLAPPING CATENARY_ this state emphasizes the elegant interweaving nature of the catenary arches when the hinge joint is being placed in every other neighboring slots rather than the one immediately next to it. Thus, we were able to explore the combination of both STATES 01+02, with an additional twisted fall down movement of the arch series. The grasshopper Catenary definition was used to simulate different configurations made possible by this component system of 18 rods and 36 joints – and a board with tracks!