Collaborative autonomous site assistance

 Construction sites are dynamic and challenged environment. Time management is a key aspect to solve.
Construction sites are dynamic and challenged environment. Time management is a key aspect to solve.
Wrench time of labours on construction site is 29% that means 81 % of the time is wasted in tool & material handling, material preparation and mobility This also means less productivity and less cost saving.
Complexity
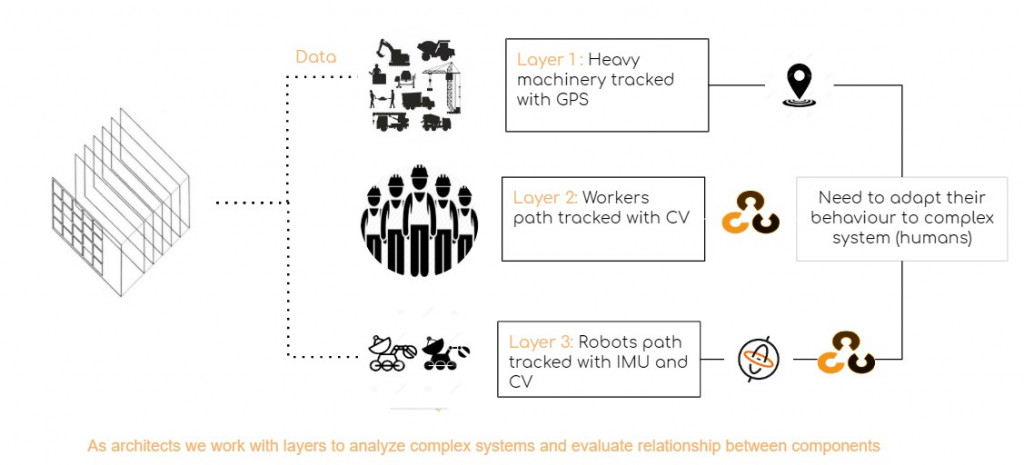
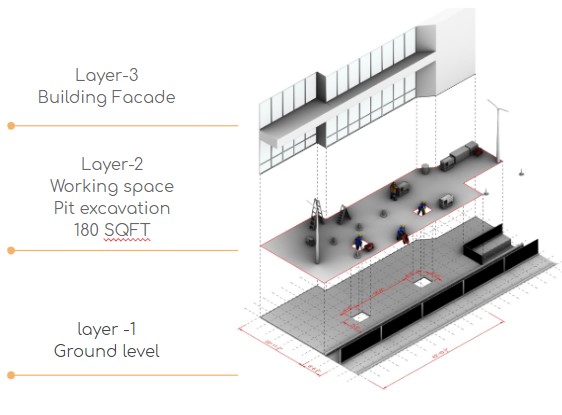
Fist we need to understand construction sites as environments. These are complex spaces, but what is complexity?
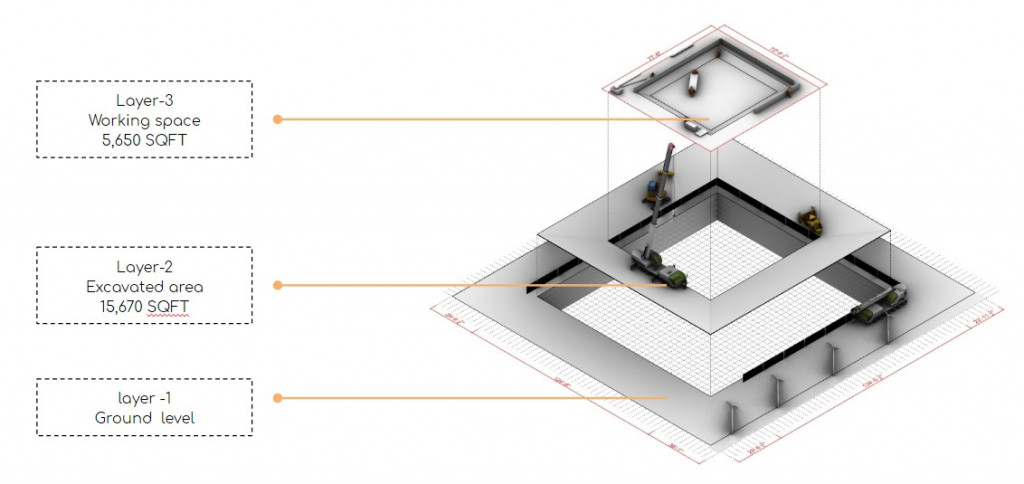
Taking construction site as a complex environment, many layers are detected. Everyone have their own behaviour, and this is the reason why find a system to track each component is neccesary. Also all this analysis implies data exchange from the layers to the system.
Market
According to the market also, analyze possible competitors to understand where is the added value of the proposal is also important.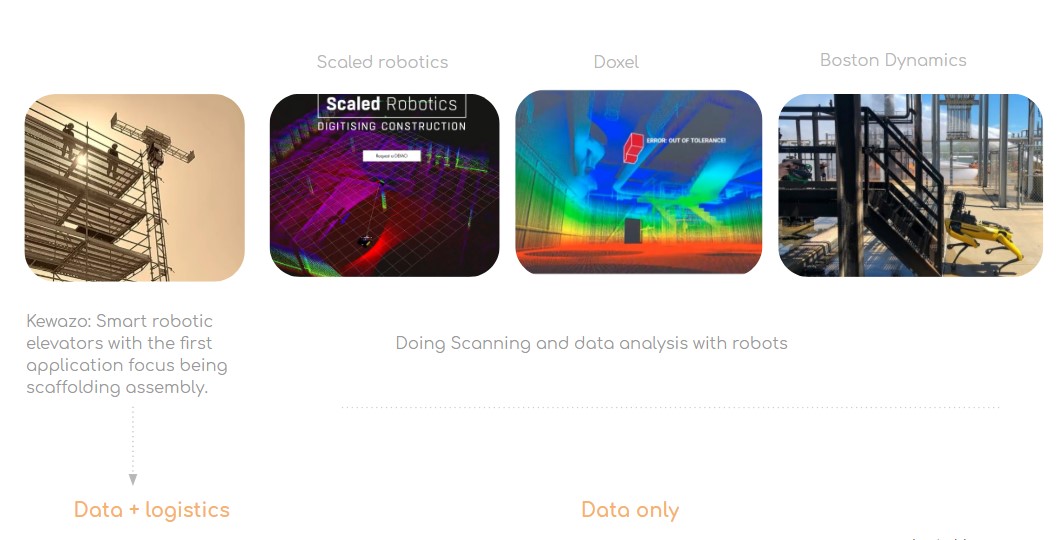
Only one company is focused on logistics and data, the others in the market are focused only in data. That means an opportunity to explore .
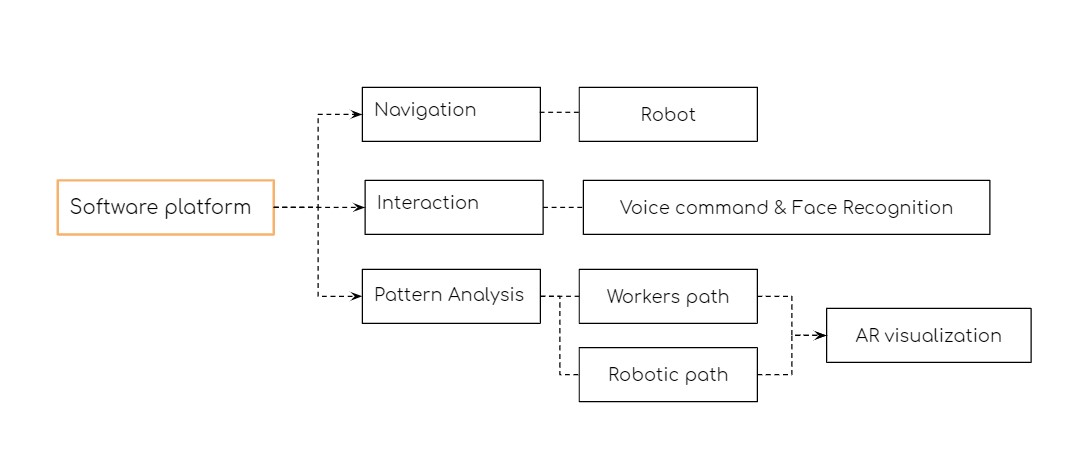
A proposed platform for construction site management has two principal components: sotfware and hardware.
With software is possible to administrate robots: how they explore and recognize the space (navigation) , how they connect with humans (interaction) and also how these robots and humans are moving in the space.
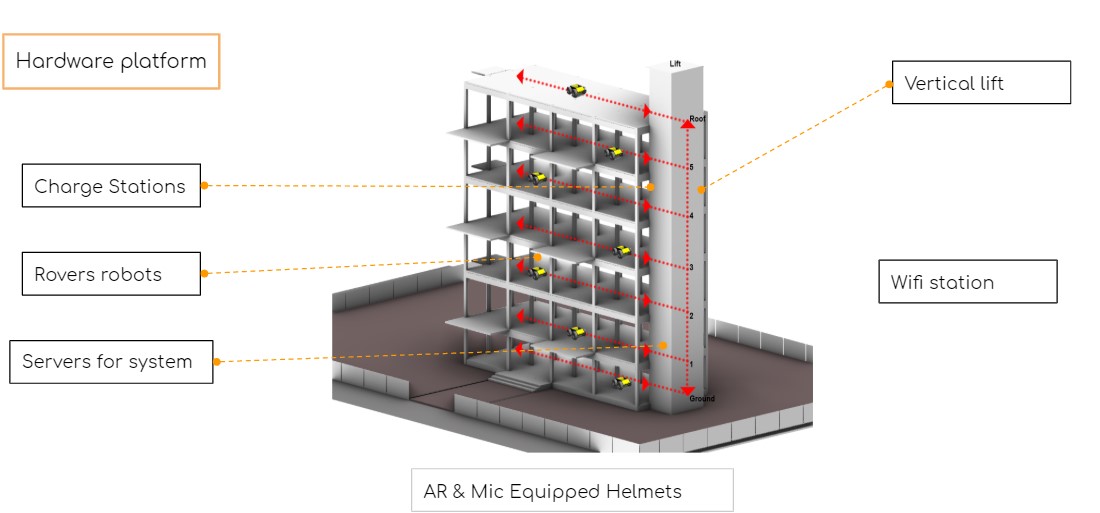
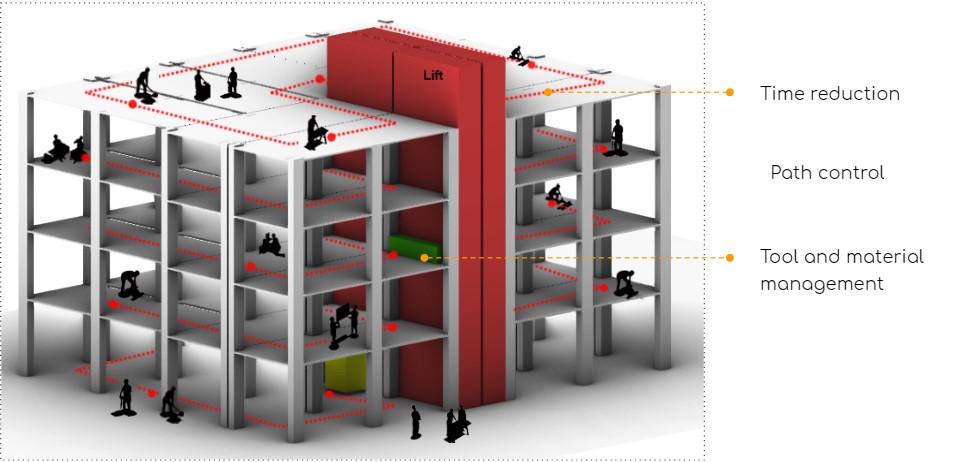
 On the hardware side, chargers stations are needed to provide energy to rovers. Also vertical connection between levels will allow robots to move in a 3d grid covering the space. The last element are the devices to connect workers with robots, helmets equiped with microphones and AR . Microphones for voice commands and AR to see robotic path in the space.
On the hardware side, chargers stations are needed to provide energy to rovers. Also vertical connection between levels will allow robots to move in a 3d grid covering the space. The last element are the devices to connect workers with robots, helmets equiped with microphones and AR . Microphones for voice commands and AR to see robotic path in the space.
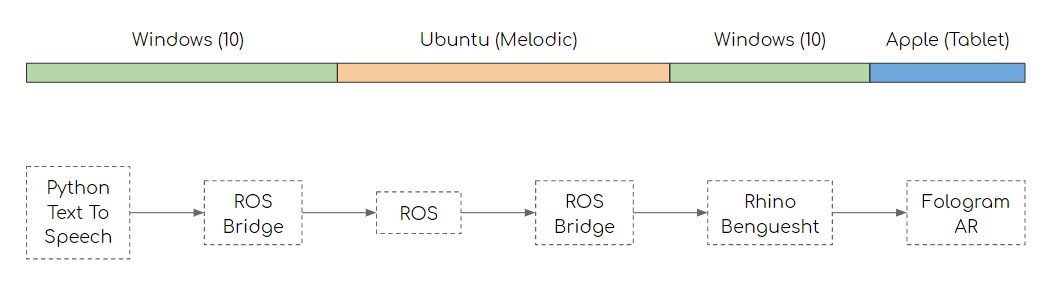
Robots are data driven collecting data for the system. Is possible to identify a local behaviour and a general one 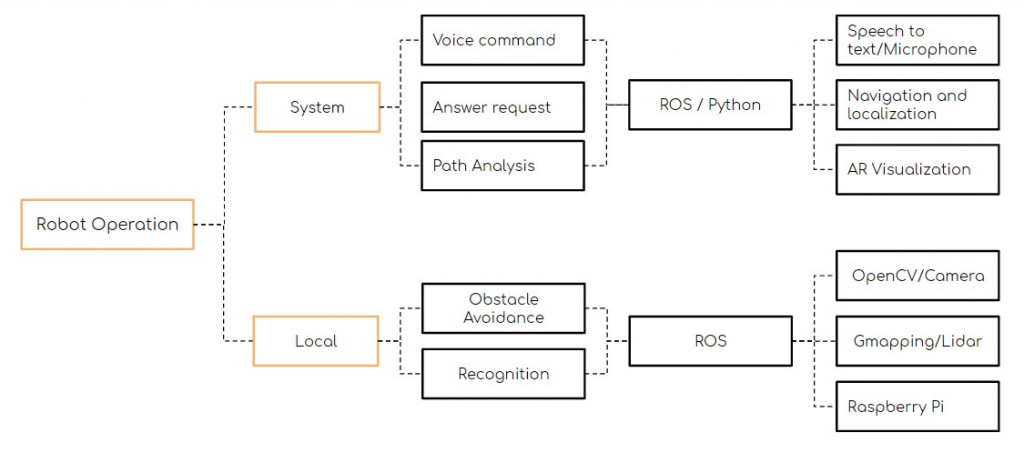 System is connected to robots through voice commands, when a worker need a tool or material, send the request using the mic on helmet to the system. The system analyzes it and send the robot to cover it. System uses several technical tools to allow this process as is observed on the graphic.
System is connected to robots through voice commands, when a worker need a tool or material, send the request using the mic on helmet to the system. The system analyzes it and send the robot to cover it. System uses several technical tools to allow this process as is observed on the graphic.
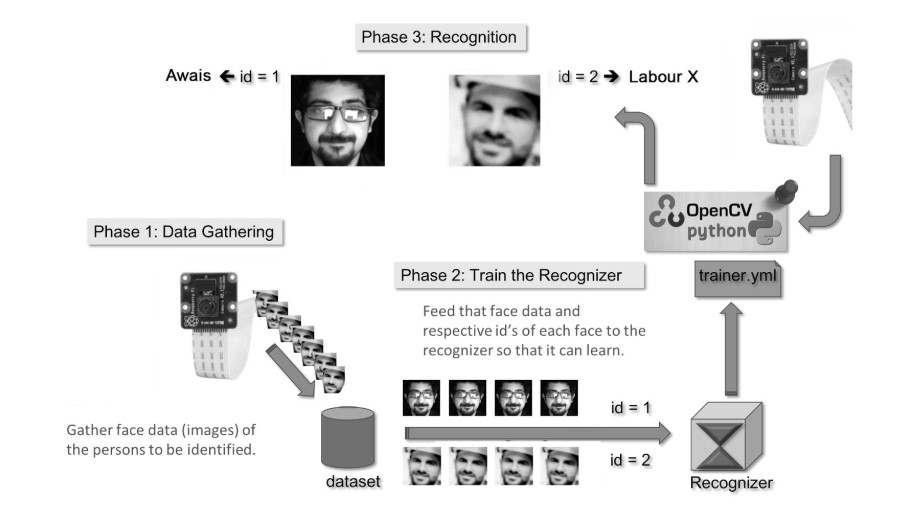
Robot also has a local level connection, because to reach destination use of local navigation is needed. This is an autonomous process, the path is the input for the system. When robot reach the worker, need to identify him to release the tool or material, using face recognition as local process and sending information to the system to get the approval .
The added value of our proposal is based on
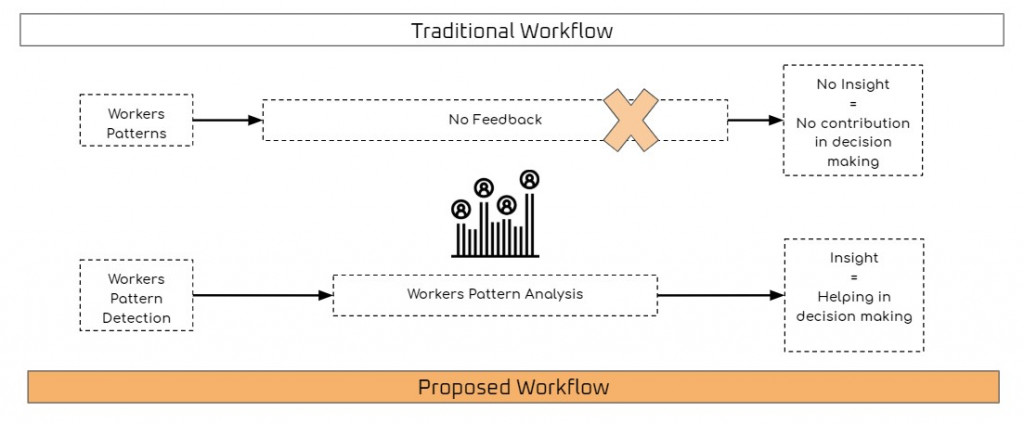
 Why resarch is needed? At the moment the traditional workflow on construction site, has no feedback to understand how workers behave loosing valuable data.
Why resarch is needed? At the moment the traditional workflow on construction site, has no feedback to understand how workers behave loosing valuable data.
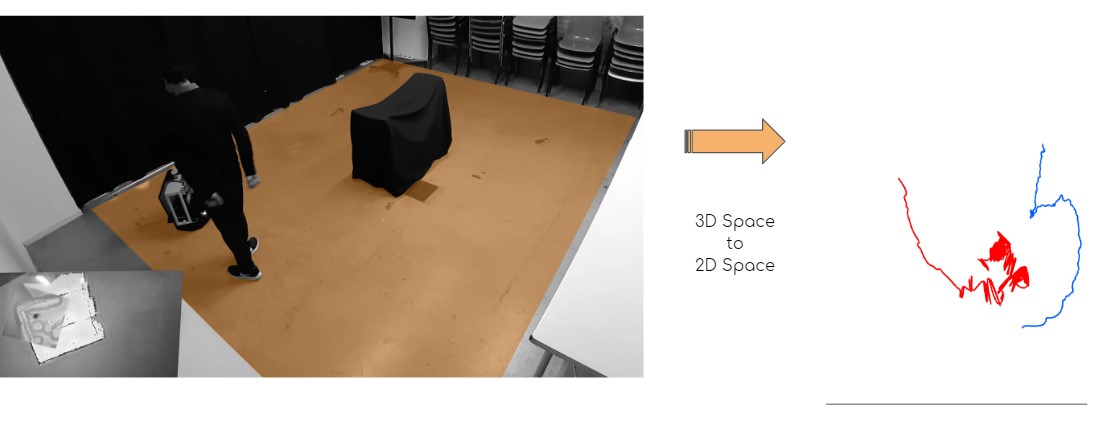
The process to get pattern is in showed in the following graphic.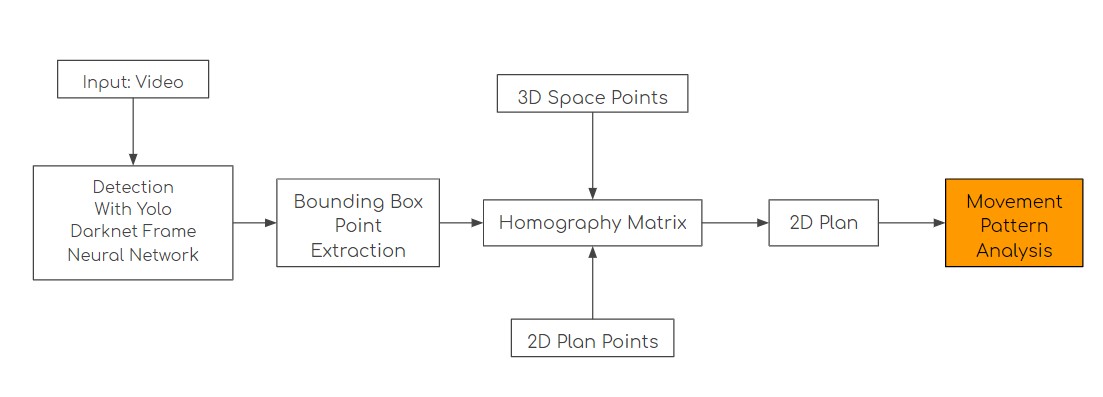
To understand better work patterns in construction, 3 cases are analyzed.
#CASE 1
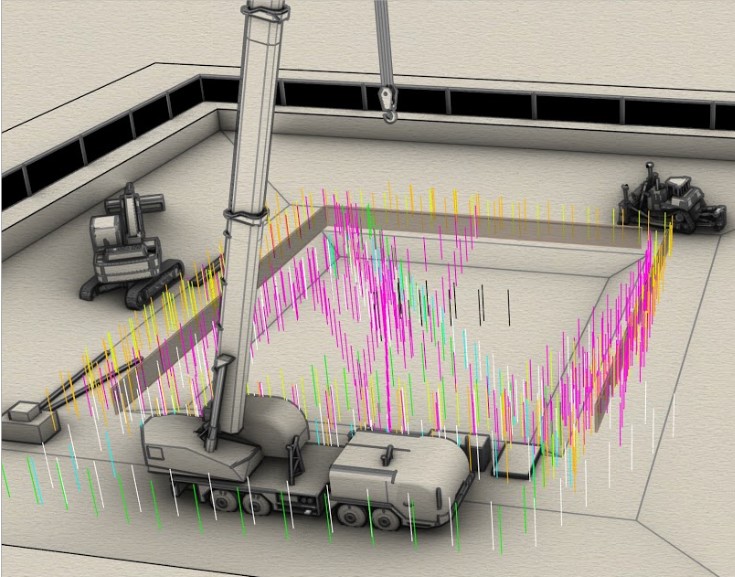
Analysis of San Francisco Hospital case. Axonometric , working space definition and worker path analysis and heat map.
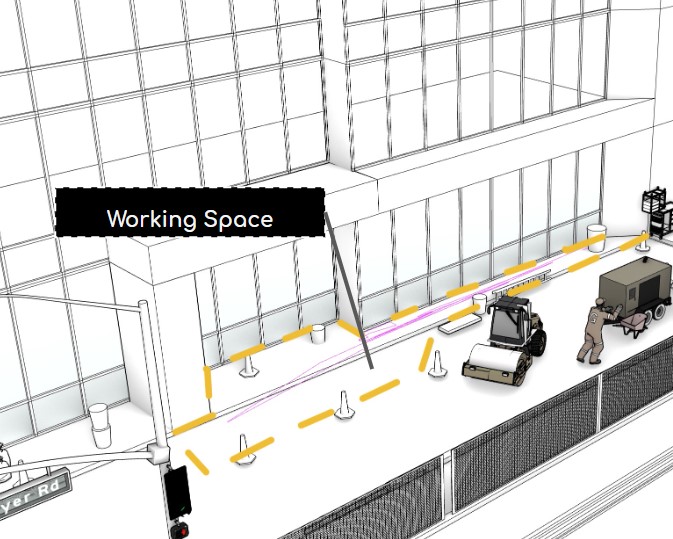
Distance Traveled: 51 meter Transporting & Making Material
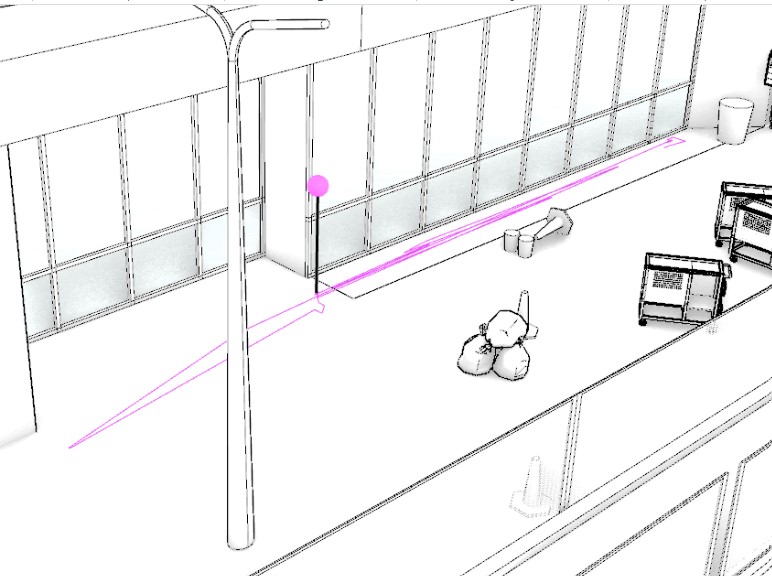
#CASE 2
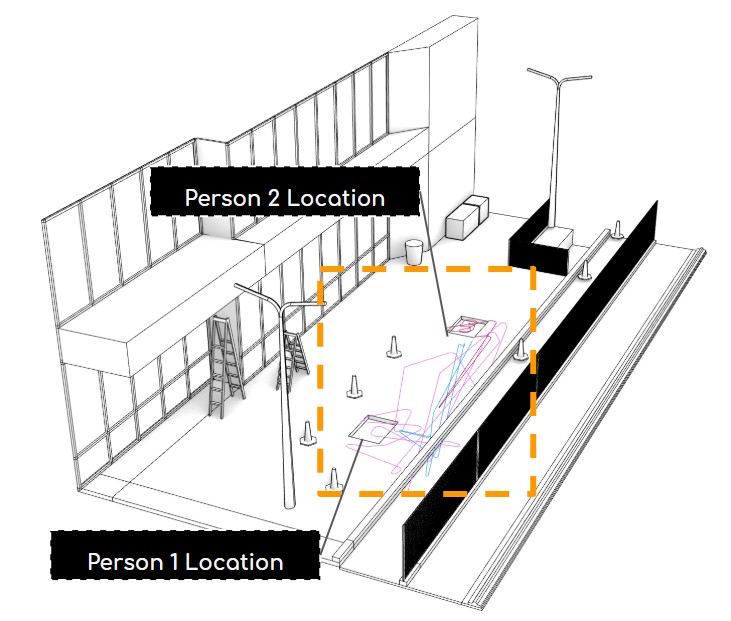
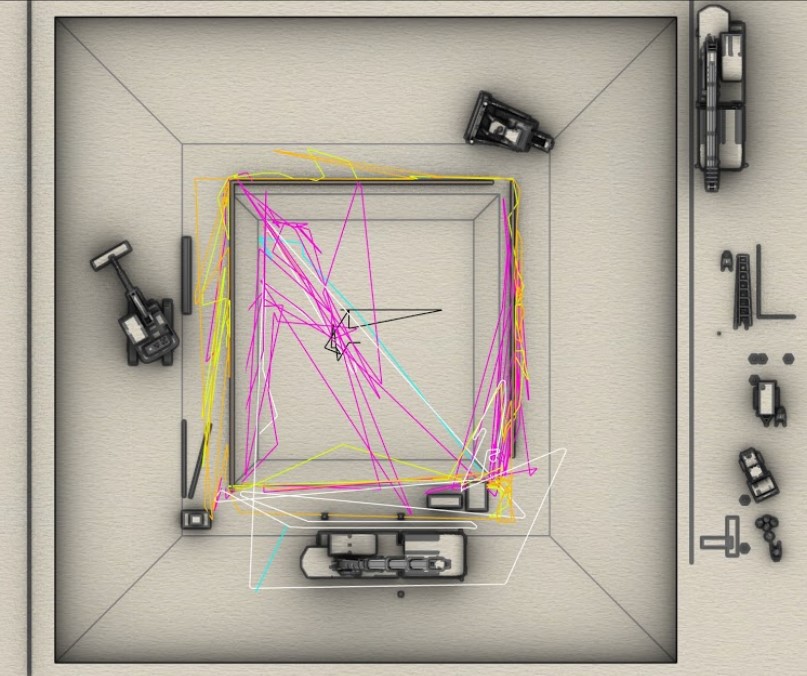
Footprint Pattern
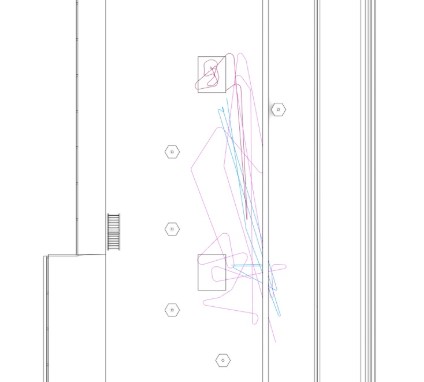
Trolley : Distance Traveled: 17 meter, person 1: distance traveled: 53 meters, person 2: distance traveled: 25 meter
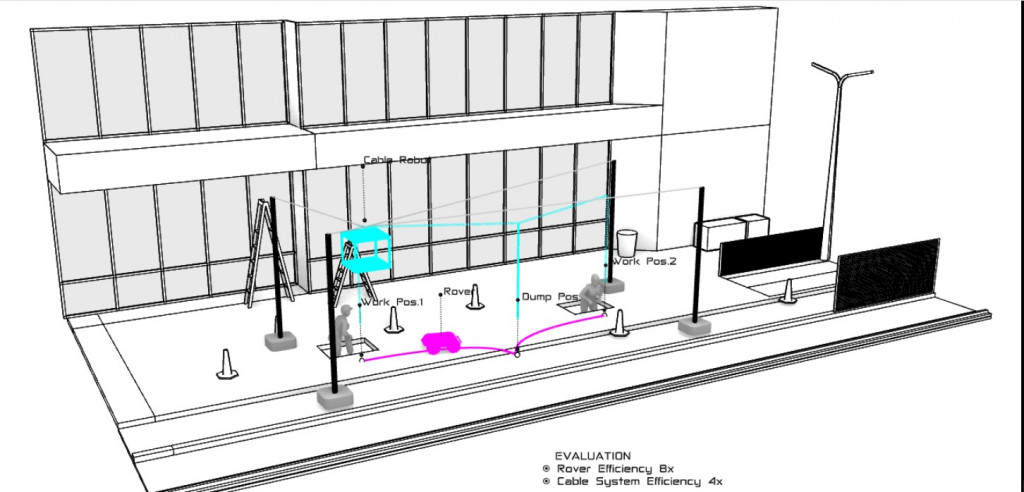
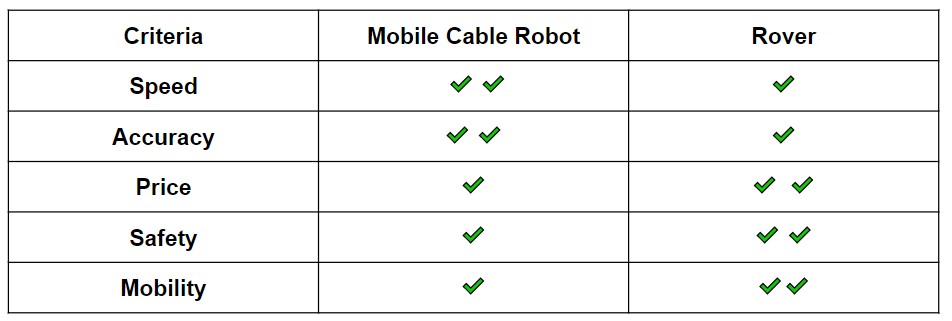
Comparing performance between two possible solutions: cable robot and rover has a better performance
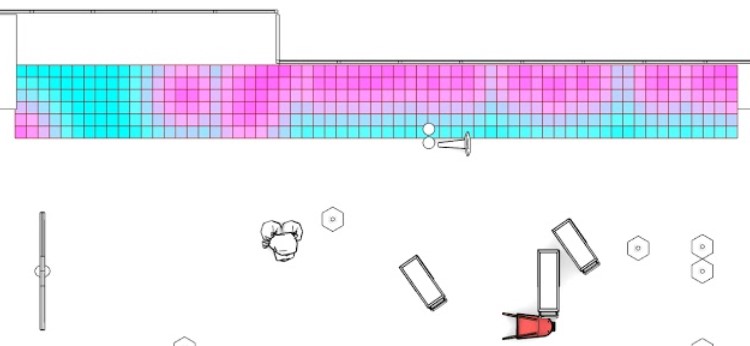
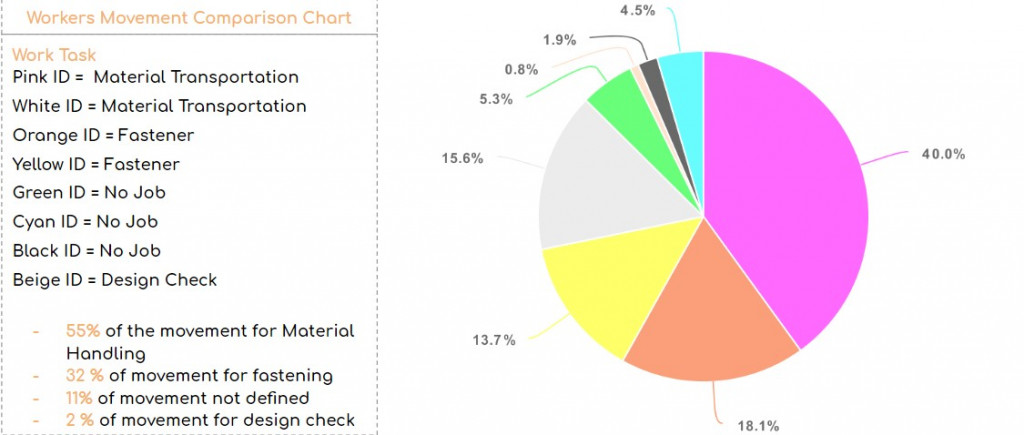
#CASE 3
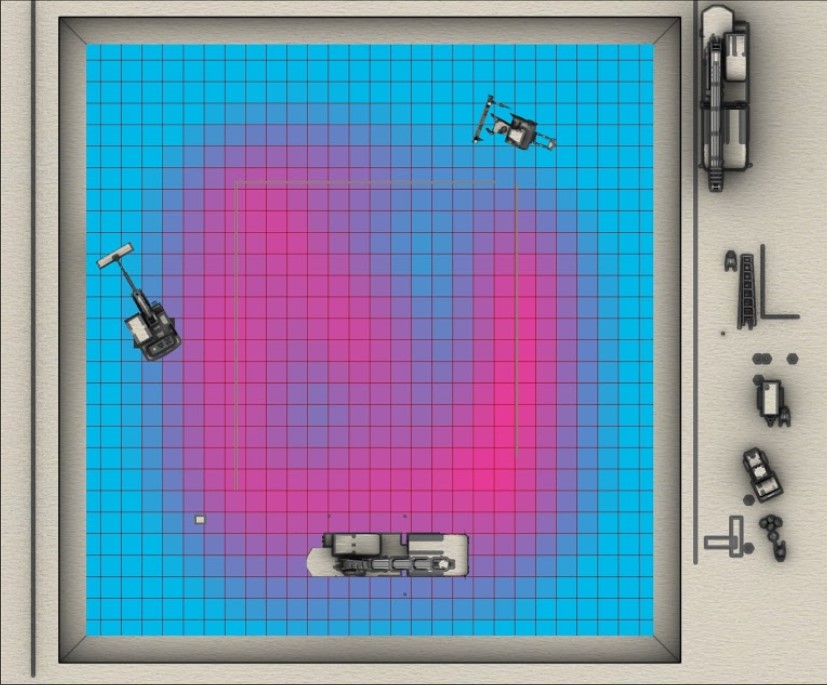
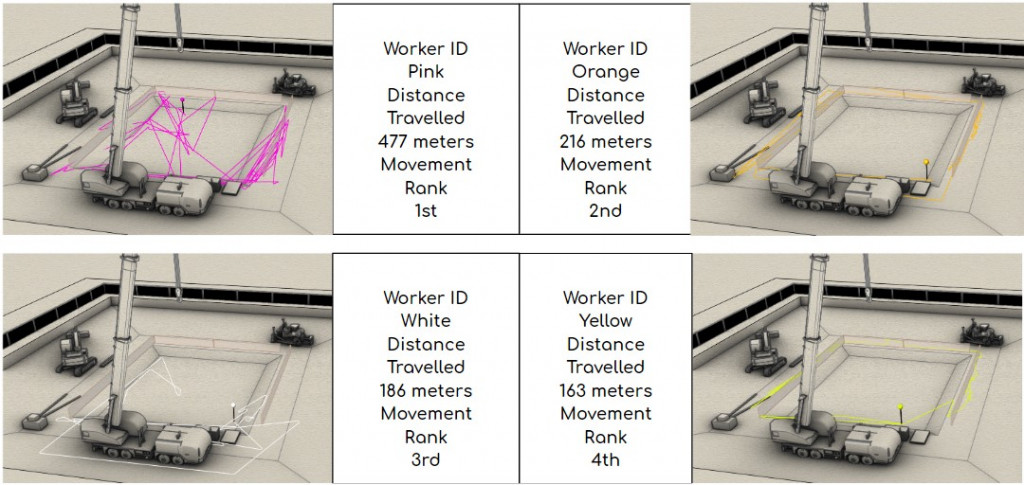
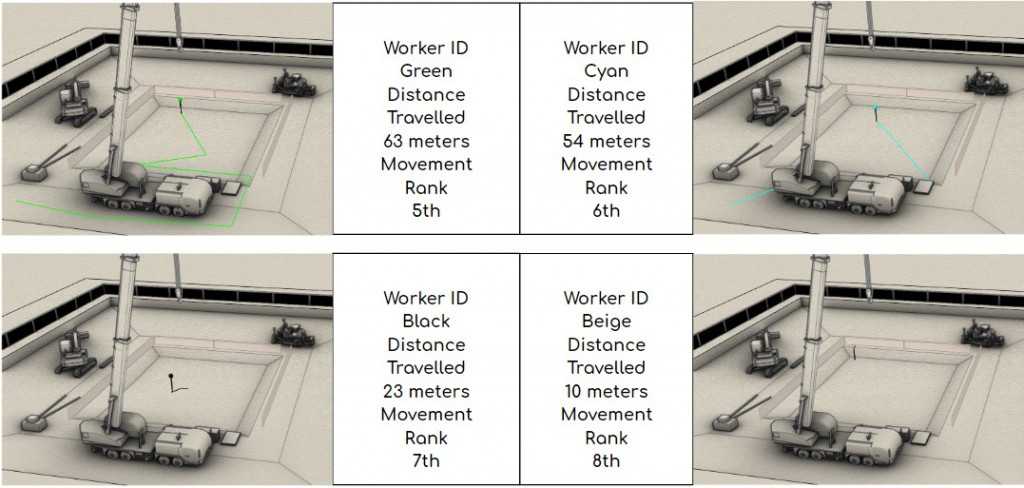
Workers tracking comparison

To develop this system, the above technologies were used
Human following
Autonomous Navigation with & without Obstacle Avoidance
Self learning Navigation with Machine Learning
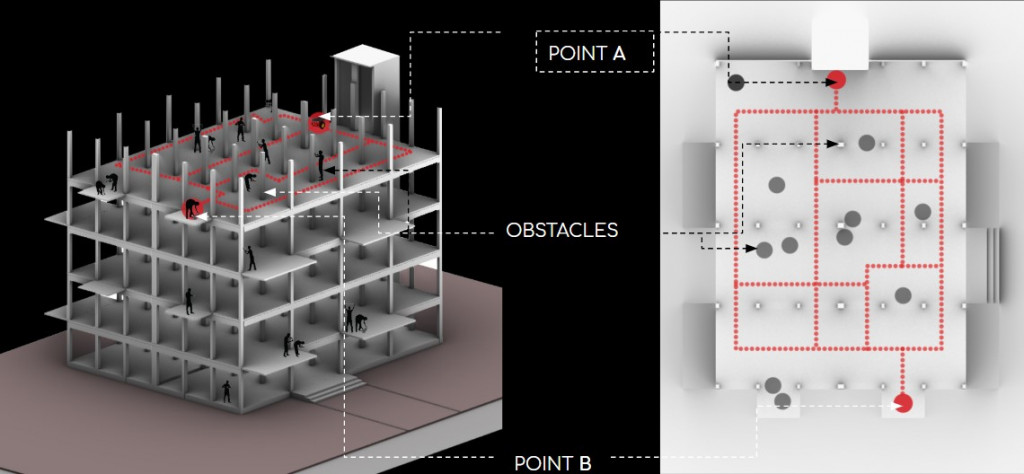
Goal :Reach final position with self learning by taking shortest path and minimum time
Robot : Pioneer, Sensors: 16 , Goal: Obstacle Avoidance with shortest distance
Worker Face Recognition
Labour Face Recognition for Tool Handling
Voice commands
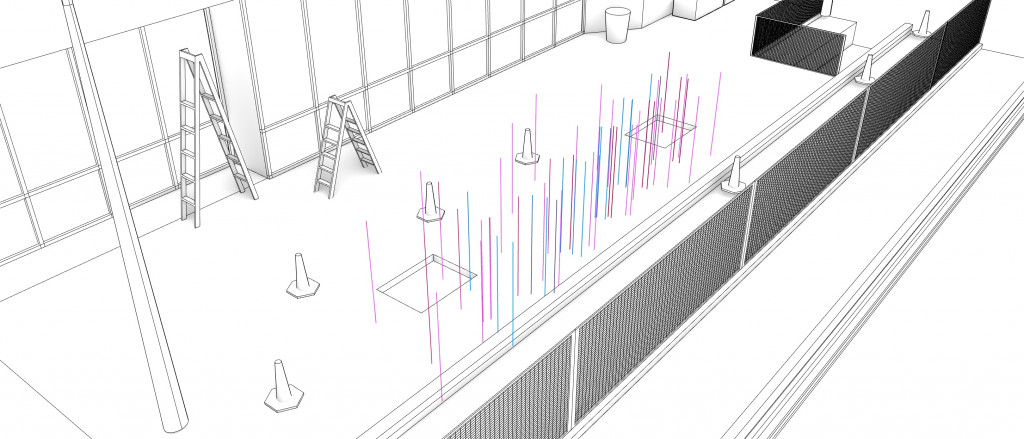
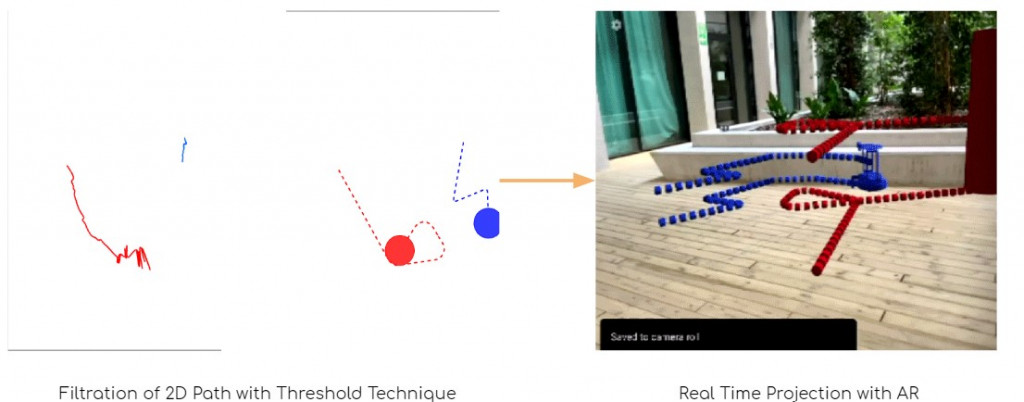
Augmented feedback of site patterns
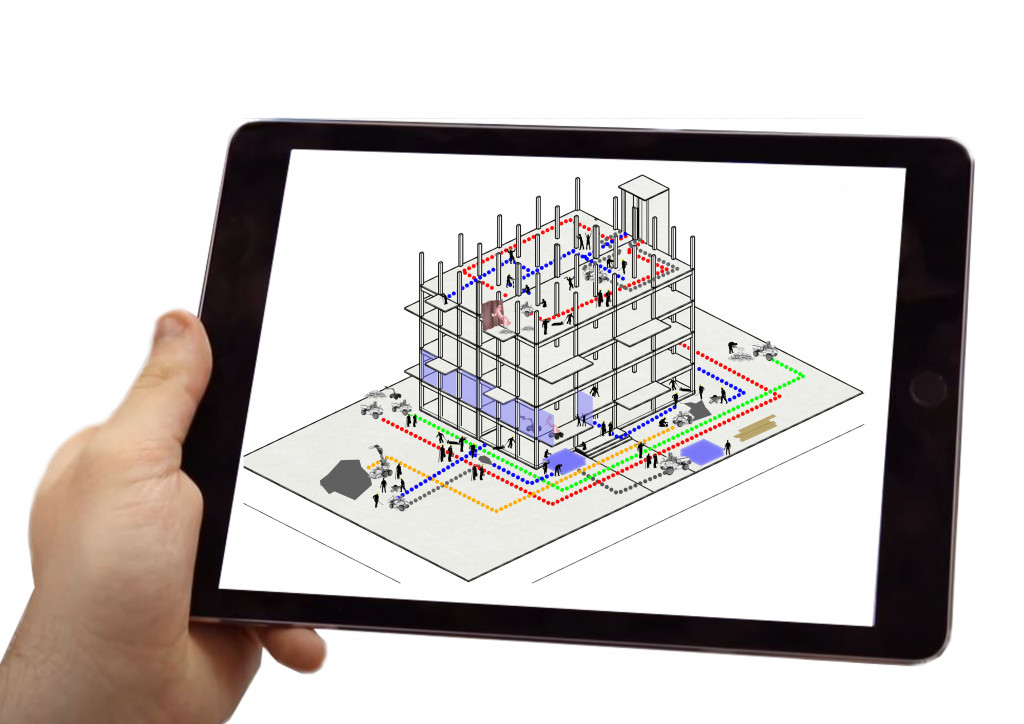 Site patterns of robot and workers can be seen in real environment on construction site with mixed reality supported mobile phones
Site patterns of robot and workers can be seen in real environment on construction site with mixed reality supported mobile phones
Our vision for a further future is a system integrating many different robots as collaborative helpers as construction site.

In a closer vision more easier to deploy in a shorter time, we can integrate rovers as helpers in construction using voice command connected with the main system an connected with workers through the use of special helmets with mic and AR view.

Collaborative autonomous site assistance is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in MRAC 2019/20 by: Students: Mansoor Awais, Amit Pattar and Isabel Cousseau Faculty: Aldo Sollazzo, Alexandre Dubor