Cost Effective Non-Elastomeric Laser Welded Pneumatic Robotic System
The new semester brought us fresh challenges. After the first experiments using Arduino in the first one, we were encouraged to use sensors in order to get feedback.
Inspired by the Javier or Guijarro research at Fab Academy in 2018, we decided to combine laser sintering of plastic foil, Arduino and sensors to create a robot capable to move alone. It was the perfect solution for us because it provided very low production costs and a satisfactory repetition of experiments.
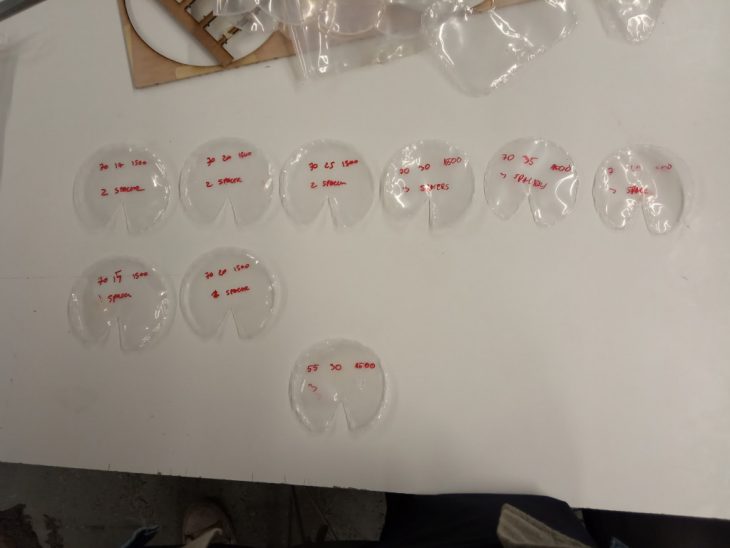
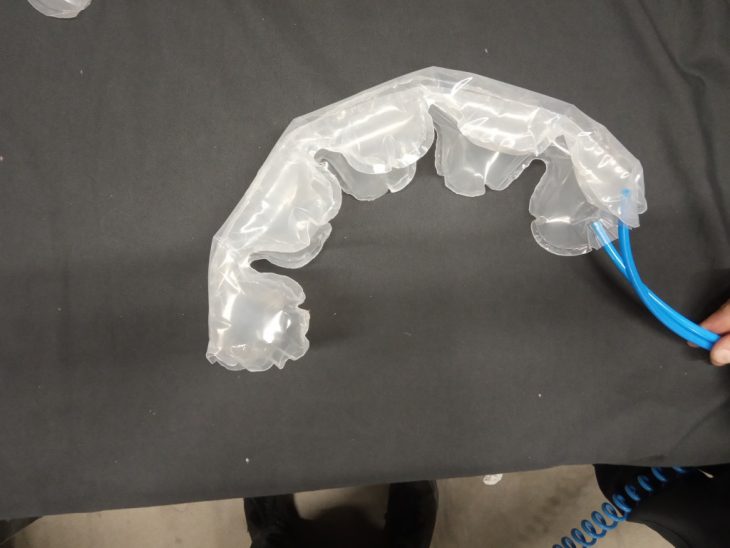
The first attempts were to recreate the Javier experiment and adapt it to our needs. We later started to test different shapes in order to get a movement, capable to move our robot. The biggest success was to get a complex three-dimensional movement.

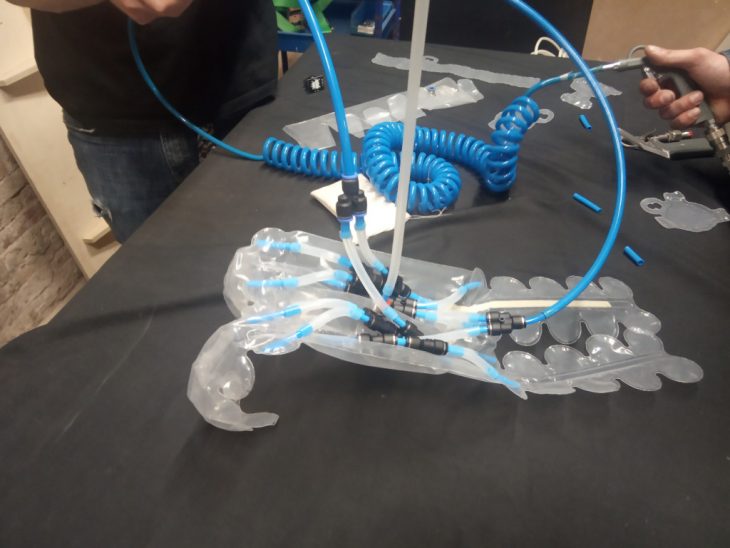
Then we started to build a system that could gain freedom of movement with a pneumatic valve. Observing the world of animals, and other similar robots, we have created a main chamber system and four independent legs of each one can bend or straighten. This allowed us for a lot of different combinations and attempts to get a walking process. Unfortunately, despite many attempts, it was not possible to reach satisfying distances. Despite some successes, the tightness of the system, its weight, and motor coordination remain to be refined.
Students: Filip Bielicki, Jean-Nicolas Alois Dackiw, Andrzej Foltman, Soroush Garivani
IAAC Faculty: Angel Muñoz