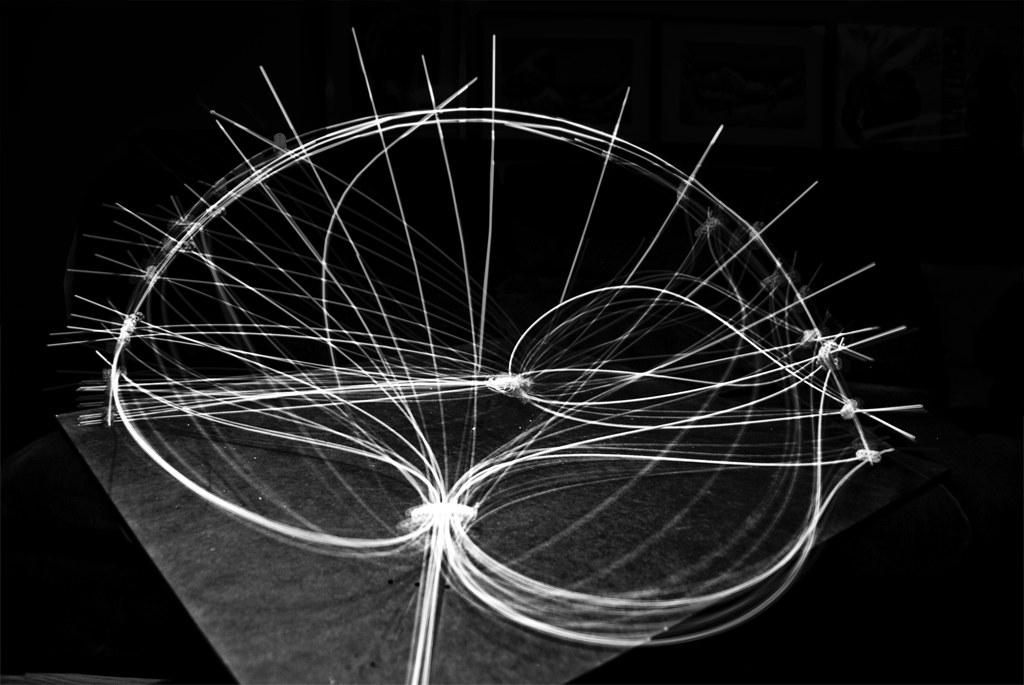
The joints were designed to take advantage of the 3d printer’s ability to create small, yet detailed 3-dimensional objects. Each joint has multiple holes to allow rods to fit in 8 different directions. The dynamic movement of the structure resembles that of a curtain. The structure can take several forms by sliding the joints through the rods: the looping (side) rods slide along a central rod arc. The transition exposed in the photo overlays is between two basic positions: one where the side rods are lying flat on the board and one where they form a full scale volume following the arc.
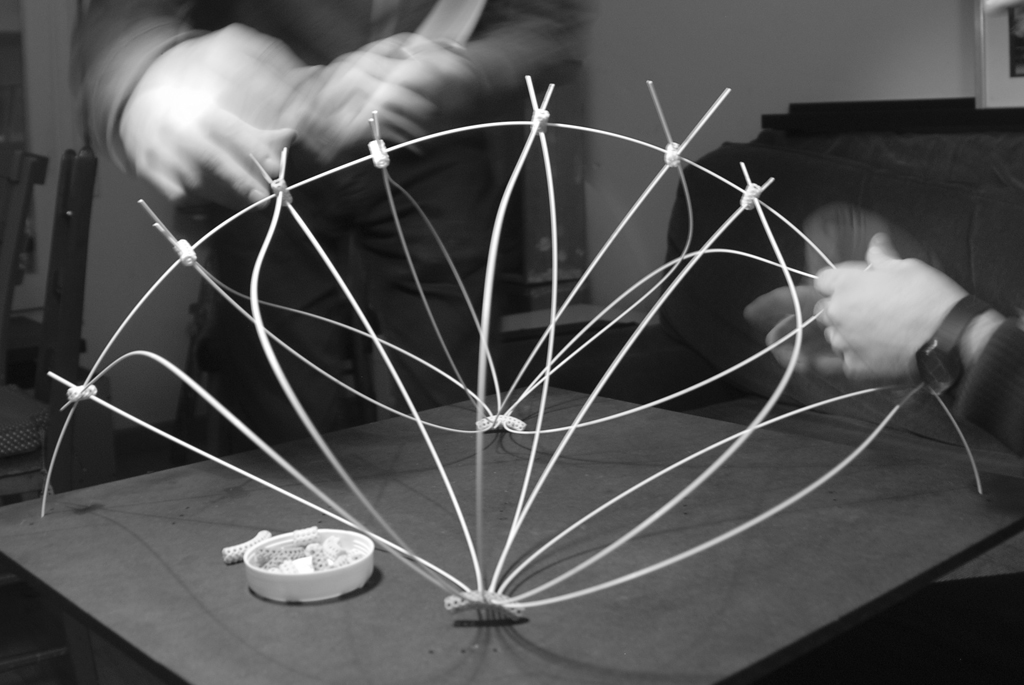
We created joints of 3 different sizes. Each of the two largest joints connects half of the side rods, so that they are able to rotate from a common point, whilst the smaller joints fix the ends of the rods, allowing linear movement along the arc that passes through the central joint channel.
Printing on the z-corp machine (composite powder) limited the joint’s strength, so further experimentation on possible forms was challenging due to the joints breaking, but nonetheless, we discovered the component’s tension thresholds and exploited its capabilities.
GROUP 02 Karl Francalanza Dimitrios Aidonis Tobias Grumstrup Lund Øhrstrøm
Moving rods – movie
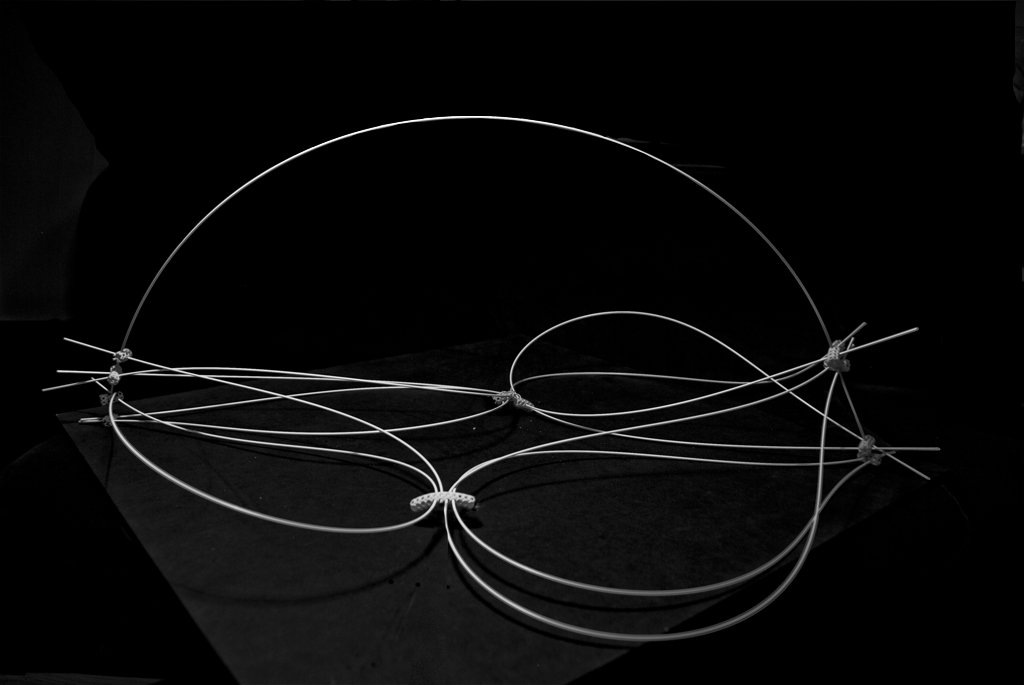
Rods are still
Structure in full shape

Joints on the structure
The printed joints
