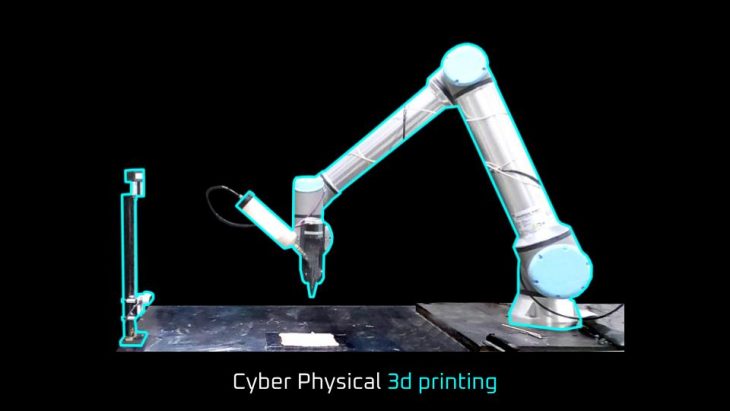
Setup – Adaptive 3d Printing
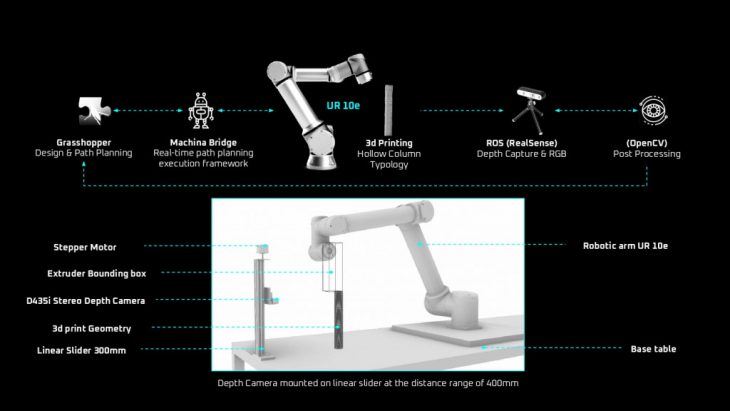
On the top is the workflow in which the communication between the robot and path planning system is described. Machina bridge make the action and response in real time. And in the bottom is the diagram showing the setup used in the process. The robot used in this test is UR10e which has built in force torque sensors in it. On the left in the lower diagram is the position of depth camera mounted on linear slider. The purpose of the linear slider is to align the depth camera with the 3d printing which help helps in the post processing of captured frames.
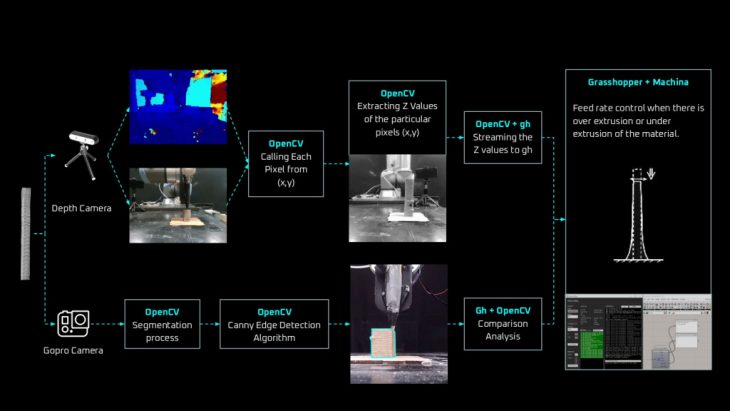
Setup – Realtime Sense & Response Protocol
There are 2 cameras. One is feeding the system with high resolution live stream to implement the canny edge detection algorithm which compares the area it detects and the the other is the stereotype depth camera providing with depth.
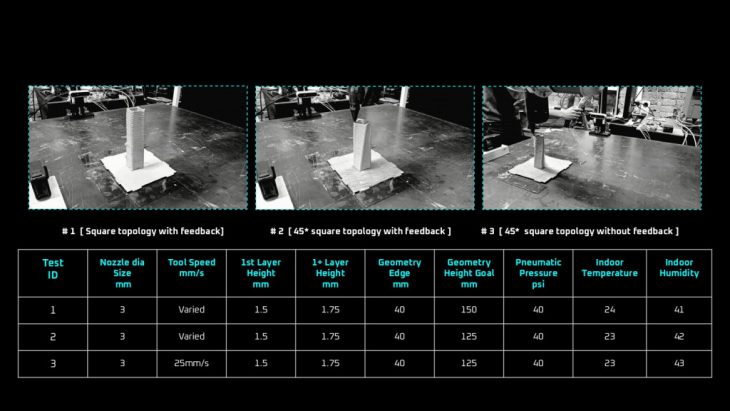
3d Printing – Hollow Column Typology with & without feedback loop
Here are some test with and without the feedback loop. In the first 2 test the system is intelligent to cover up the errors automatically and no interference is required. Where as in the 3rd case no implementation of feedback loop and the errors due to the inconsistency of material are evident in the geometric shape.
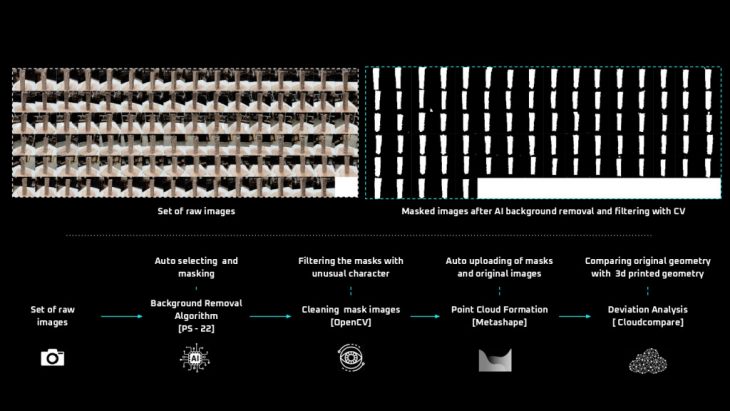
3d Print Post Analysis – Semi Automated Photogrammetry
As already explained the real time processing of data so there is also a post analysis in which photogrammetry is used to observe the deviation and to also quantify the performance of the system. Normally the method of photogrammetry takes lot of time in the processing of visual data before it’s being used. So the process is semi automated to the extent that it saves 50% of the time incase of large dataset by auto removing the background with PS 22 Algorithm and filtration process with computer vision.
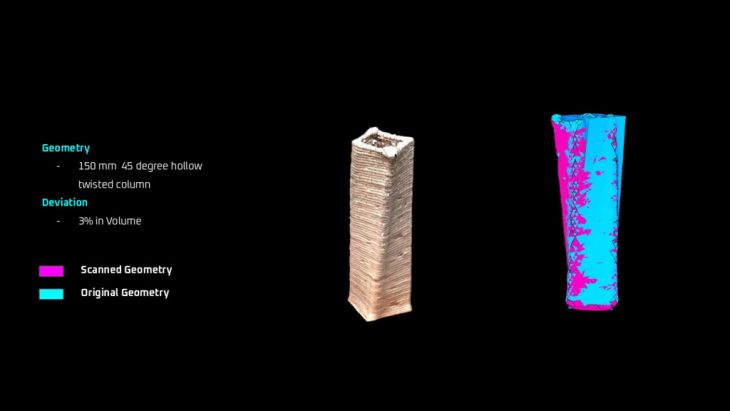
3d Print Post Analysis – Deviation Comparison
Here is the result of one of the 3d printed geometry with feedback loop. The 3d printed geometry when compare with original geometry the deviation observed is 3% in volume despite the fact that the material mix has inconsistency.
Cyber Physical 3d Printing is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Robotics and Advanced Construction 2019/21 by:
Research Students: Mansoor Awais
Faculty: Raimund Krenmueller, Angel Muñoz, Soroush Garivani