IAAC – Master in Robotics and Advanced Construction
Workshop 3.2
Tutor: Ethan Kerber / Chair for Individualized Production, RWTH Aachen University
Tutor’s Assistant: Kunaljit Chadha / IAAC
University collaborators: Chair for Individualized Production RWTH Aachen University and Robots in Architecture Research LLC
The workshop was an initial beta test of KUKA|crc (Cloud Remote Control) software development by Sven Stumm / Robots in Architecture Research LLC.
Displaced Collaboration
Designing manufacturing and programming in different places
We are experiencing incredible change in the way we work. Remote collaboration and work from home have become the new norm in office based industries. However, the construction sector comprises essential services that cannot be accomplished from a distance. Automated solutions offer the potential for remote operation and new means of human machine interaction. This workshop seeks to build remote capabilities and connections between designers and automated machines.
Concept
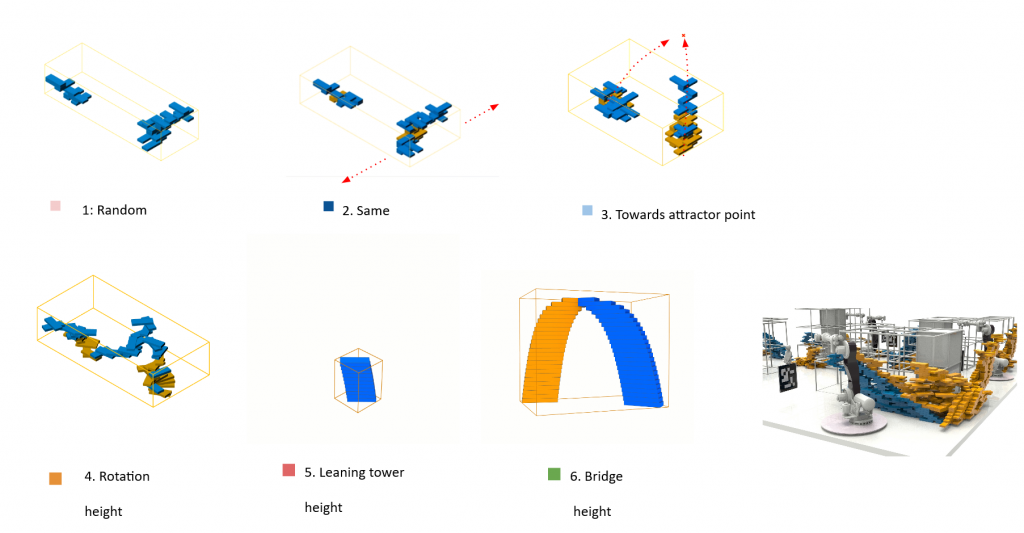
Design Options
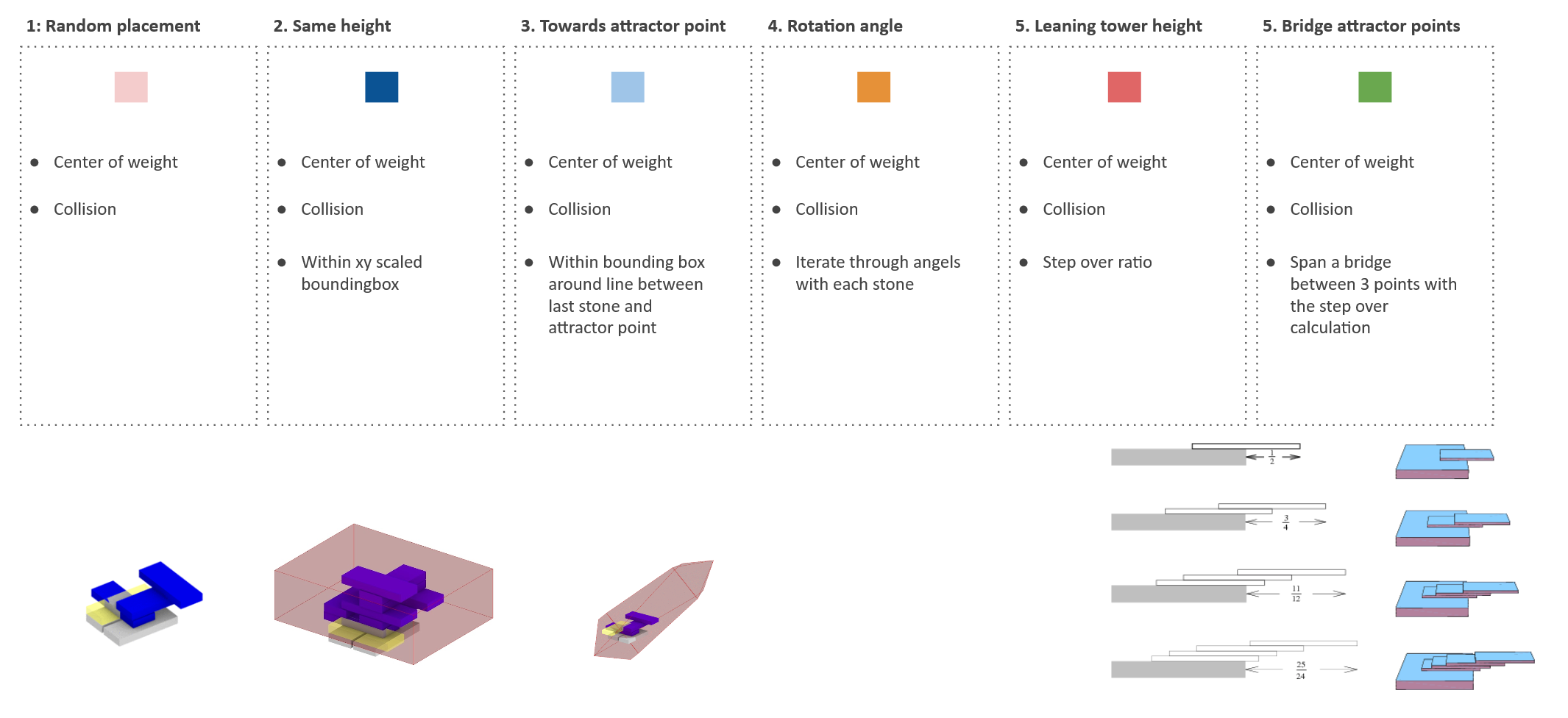
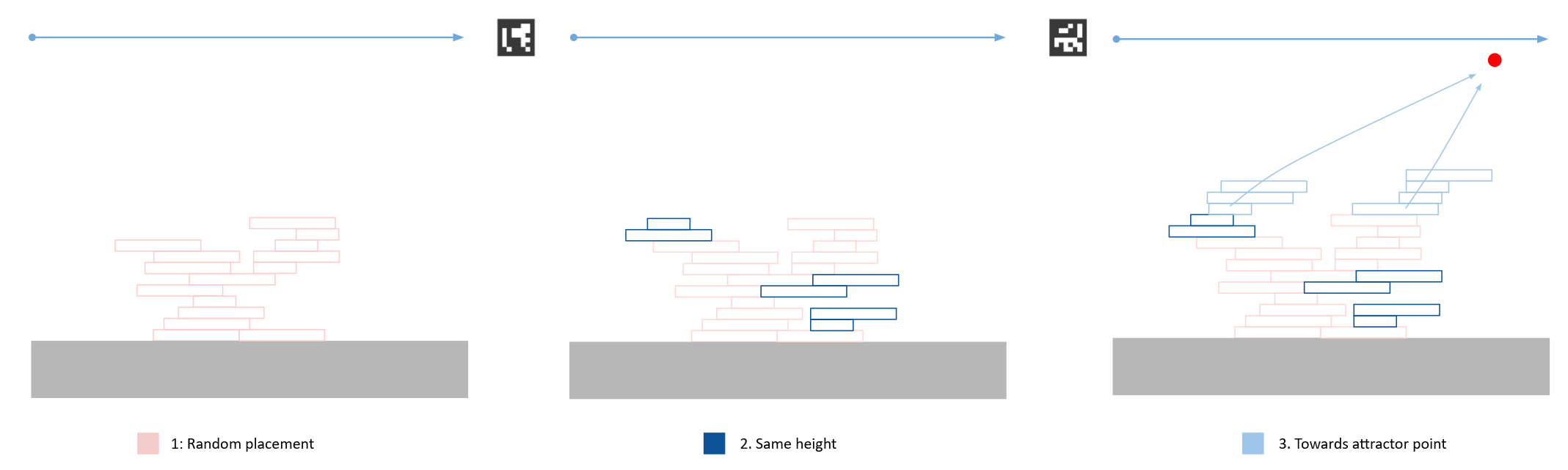
Random placement
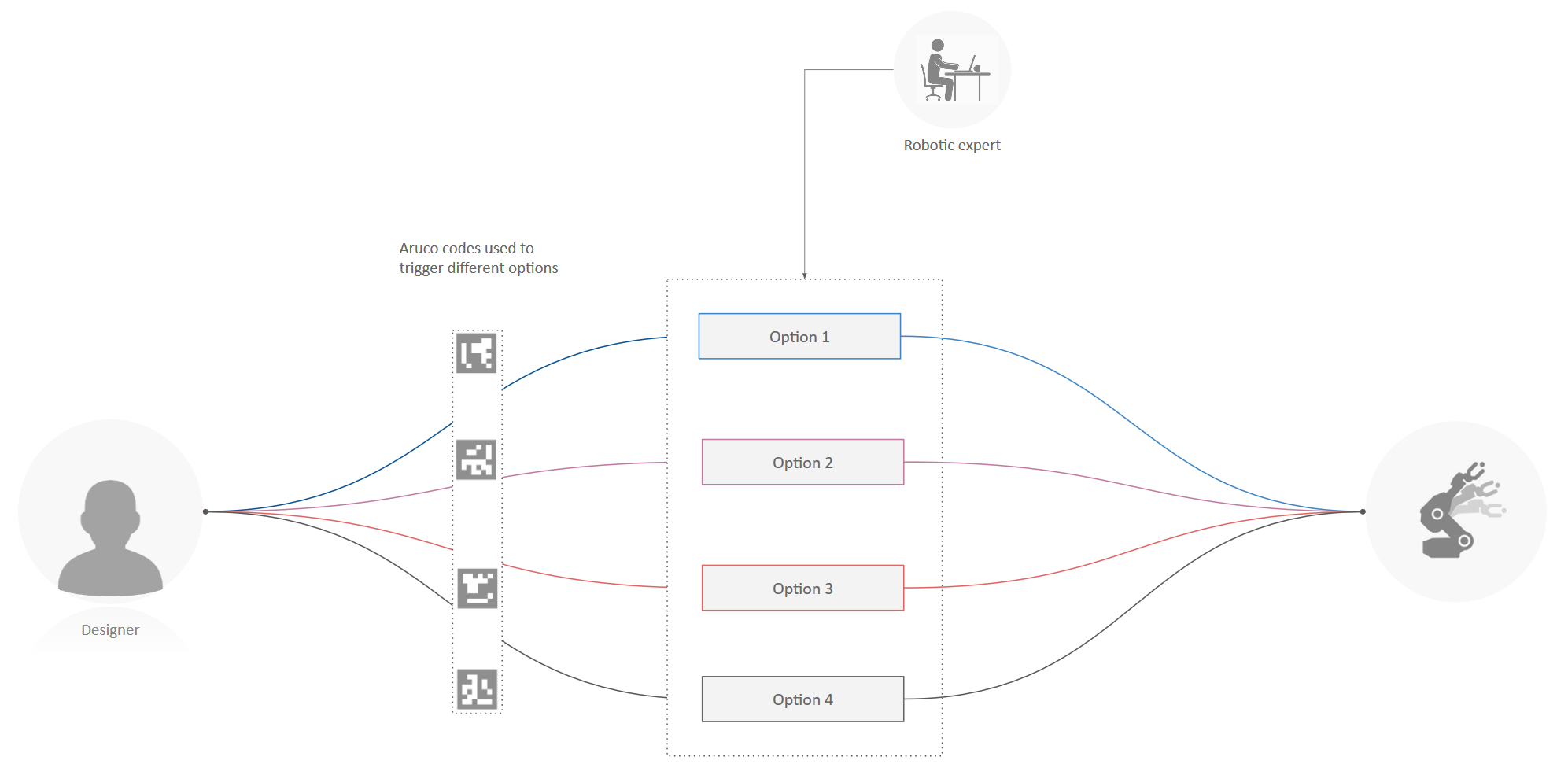
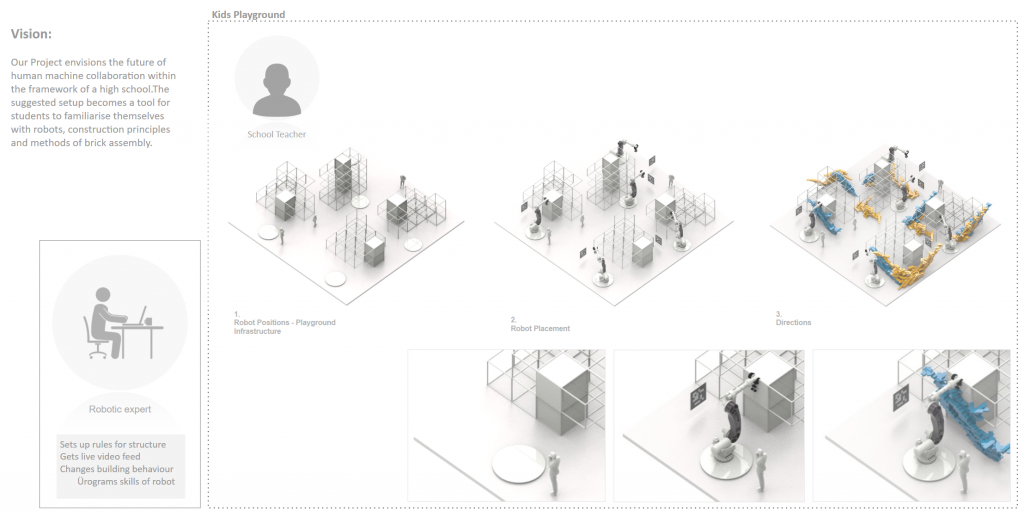
Human machine interaction
Possible objectives of robot
Idea no.2:
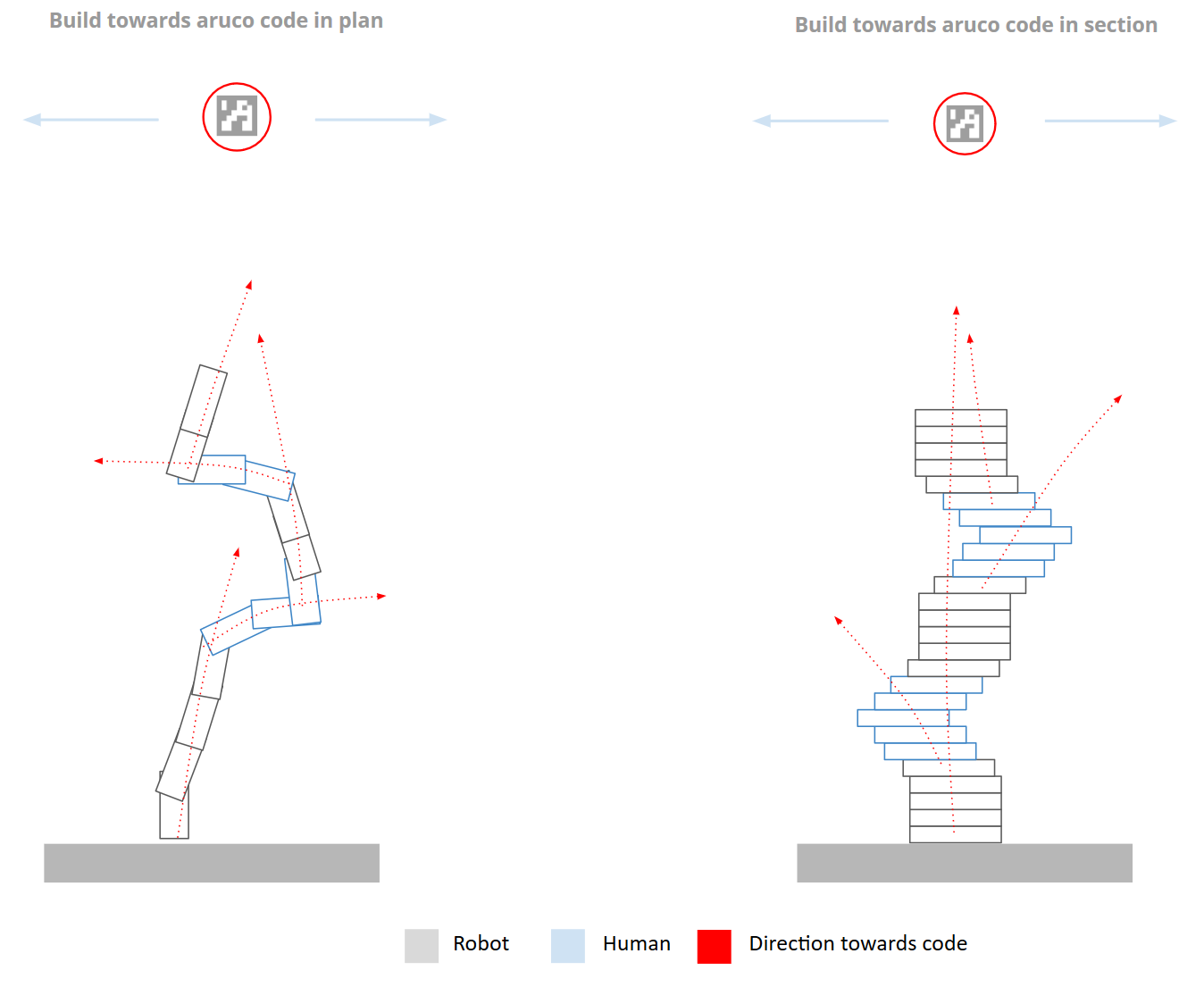
Human controls input by using aruco codes. Each code triggers a different reaction in the way of building
Objectives
-
- Create target design space
- Get computer vision feedback for what is build
- Create rules how the robot can react
Human machine interaction
Possible additions
Possible additions
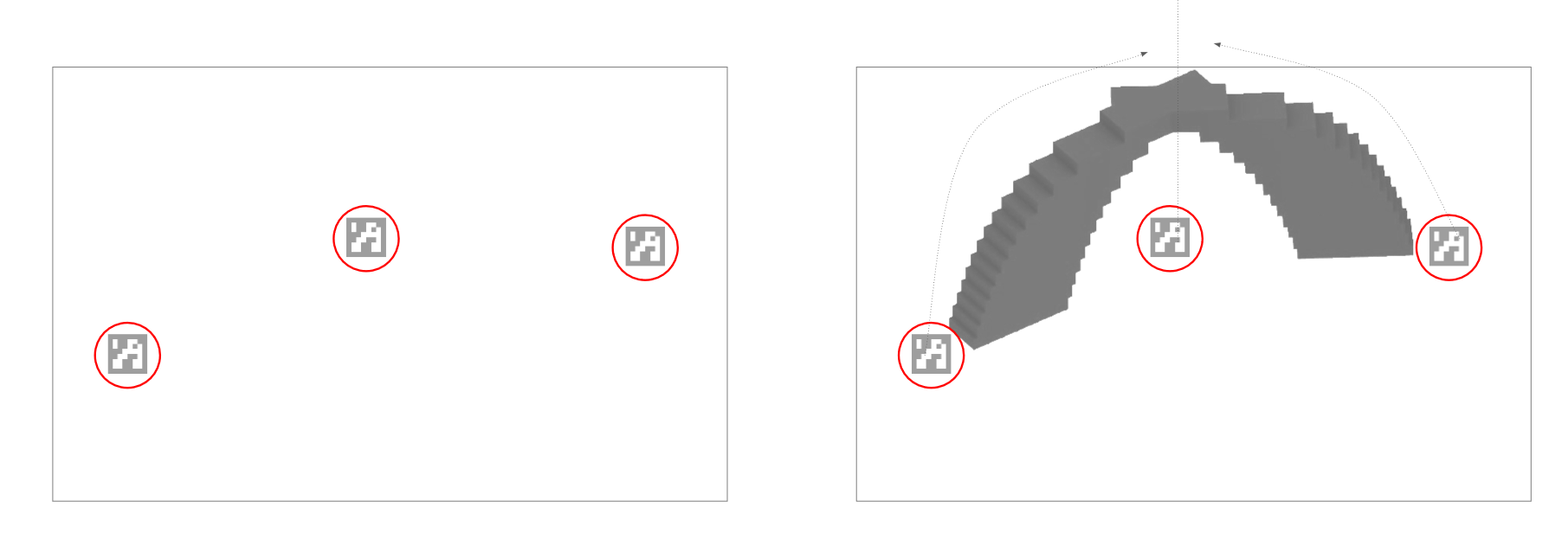
Build bridges between aruco codes
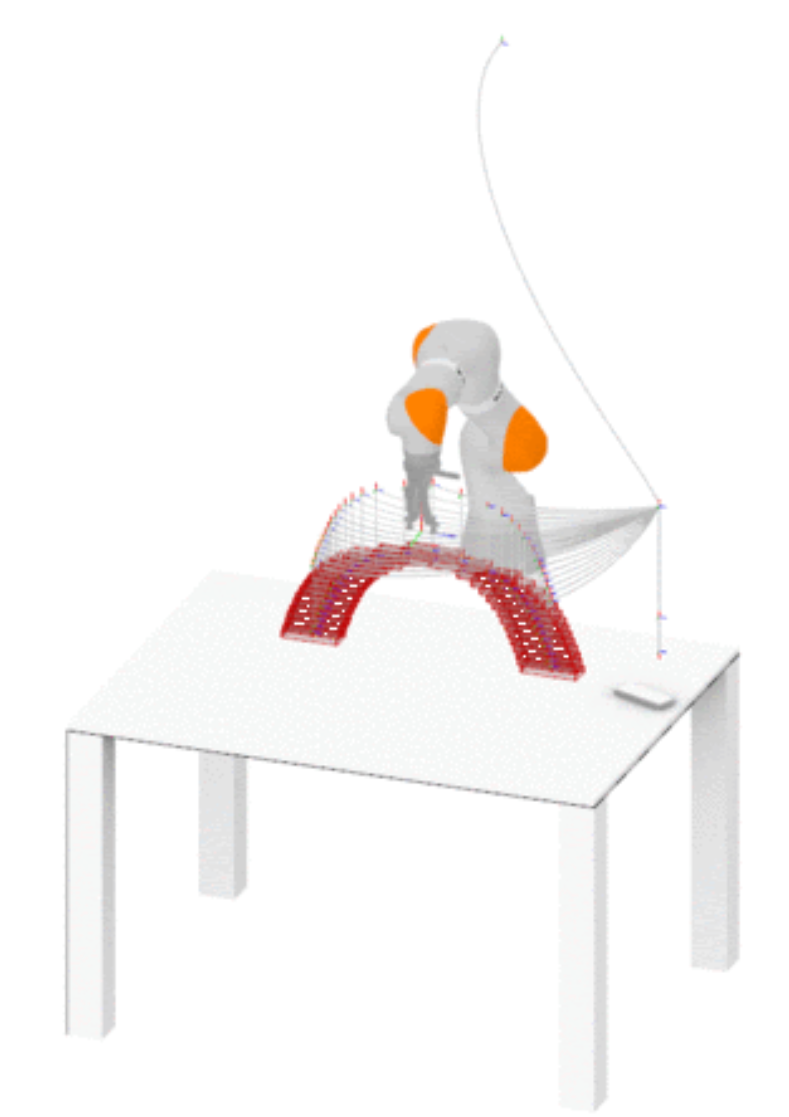
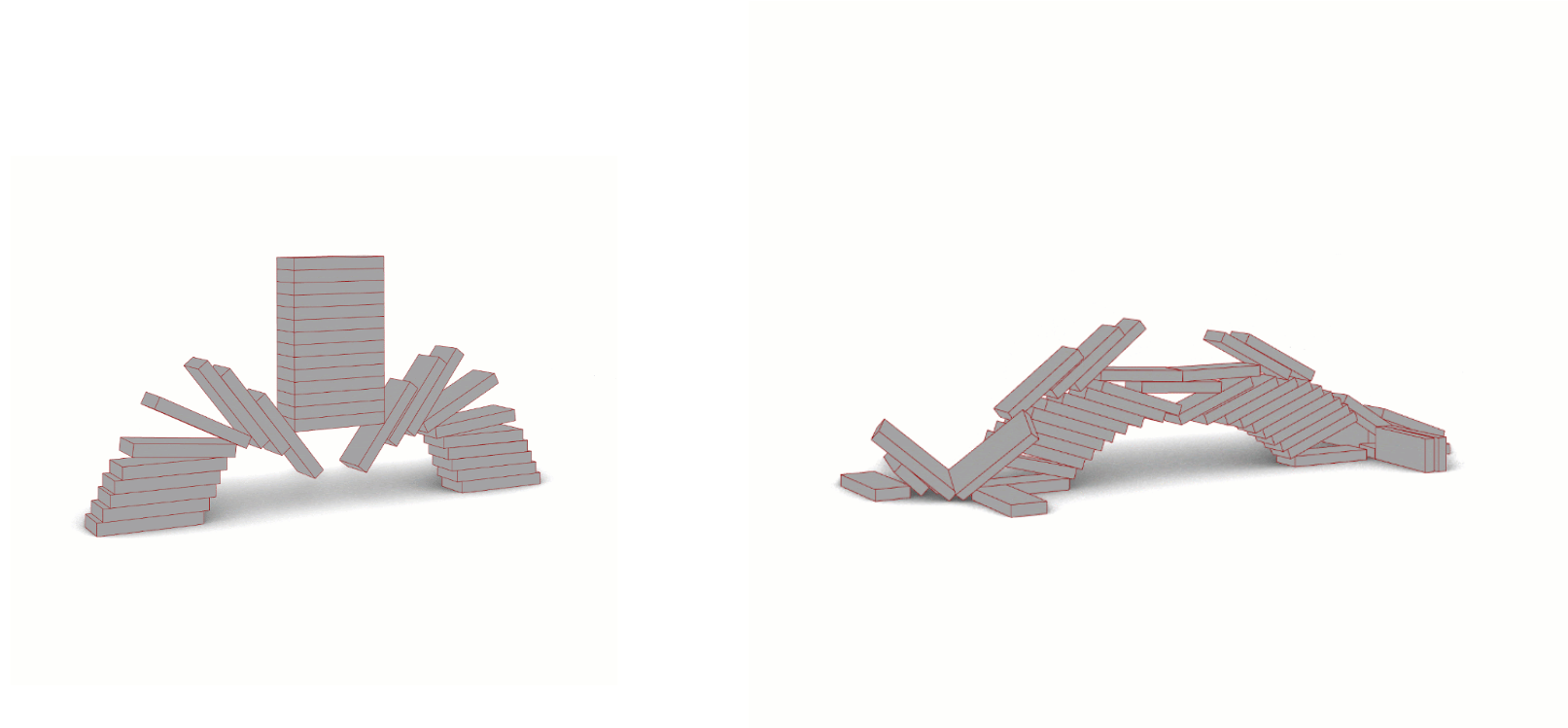
Geometry simulation
Rigid body stacking
Kangaroo:
Kangaroo is an interactive physics/constraint solver and Grasshopper plugin for designers
Parameters
-
- Collisions
- Goals-angle
- Goals-position
- Goals-meshes
Pro
-
- Lot of simulations available
- Differents weights
- Differents forces
Con
-
- No friction
- No different weights

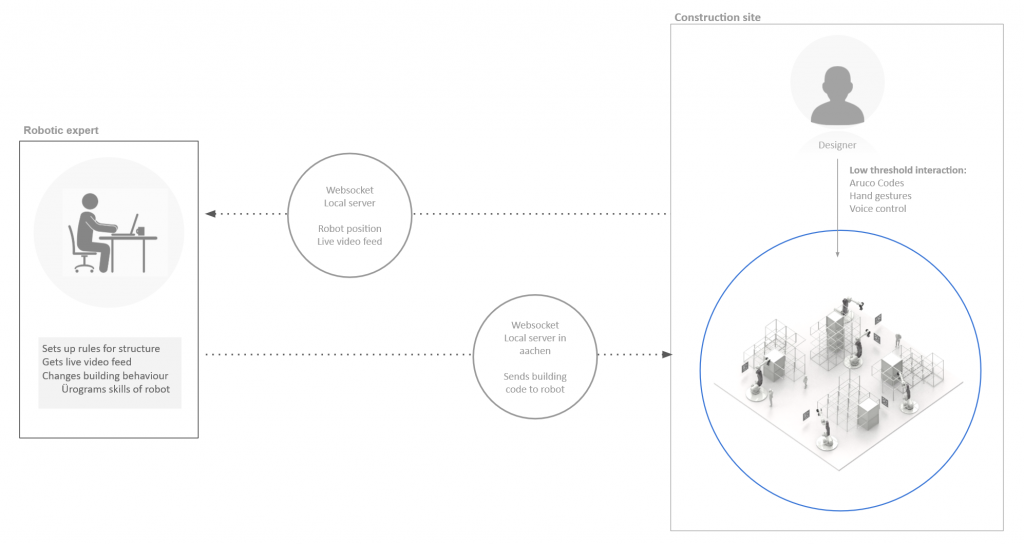
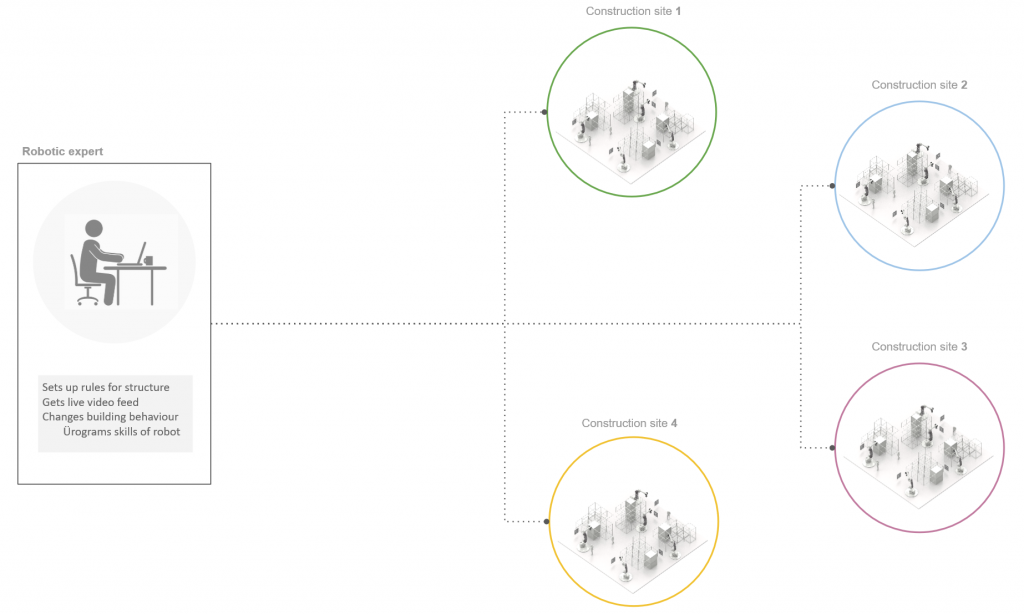
Human machine interaction
Remote Location
Physical test
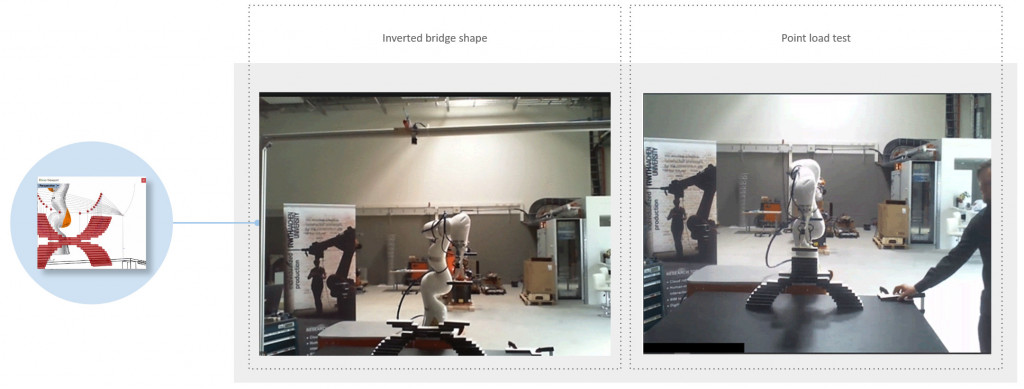
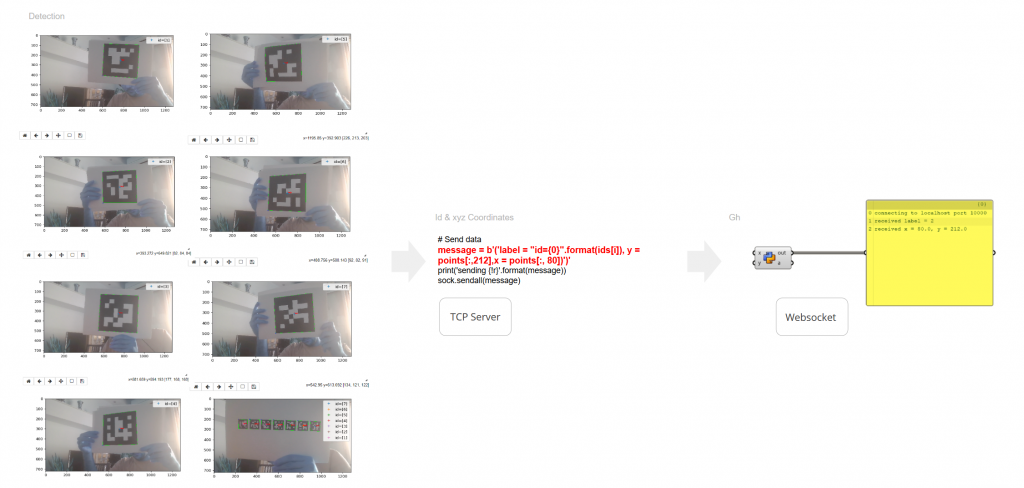
Designer – robot – communication
Aruco Codes – Setup
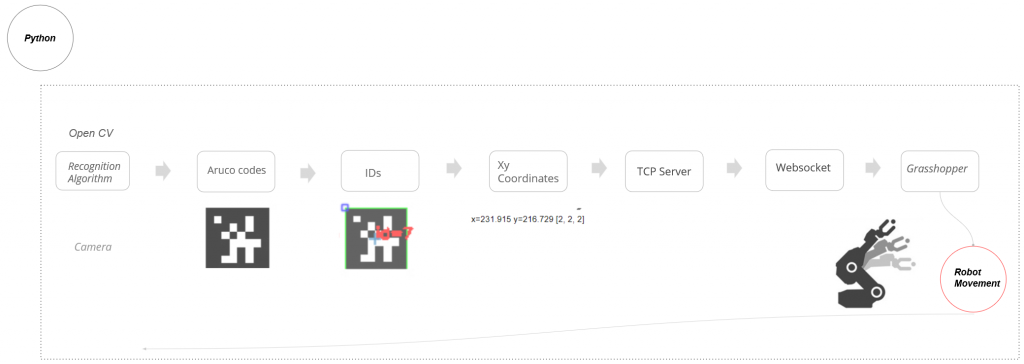
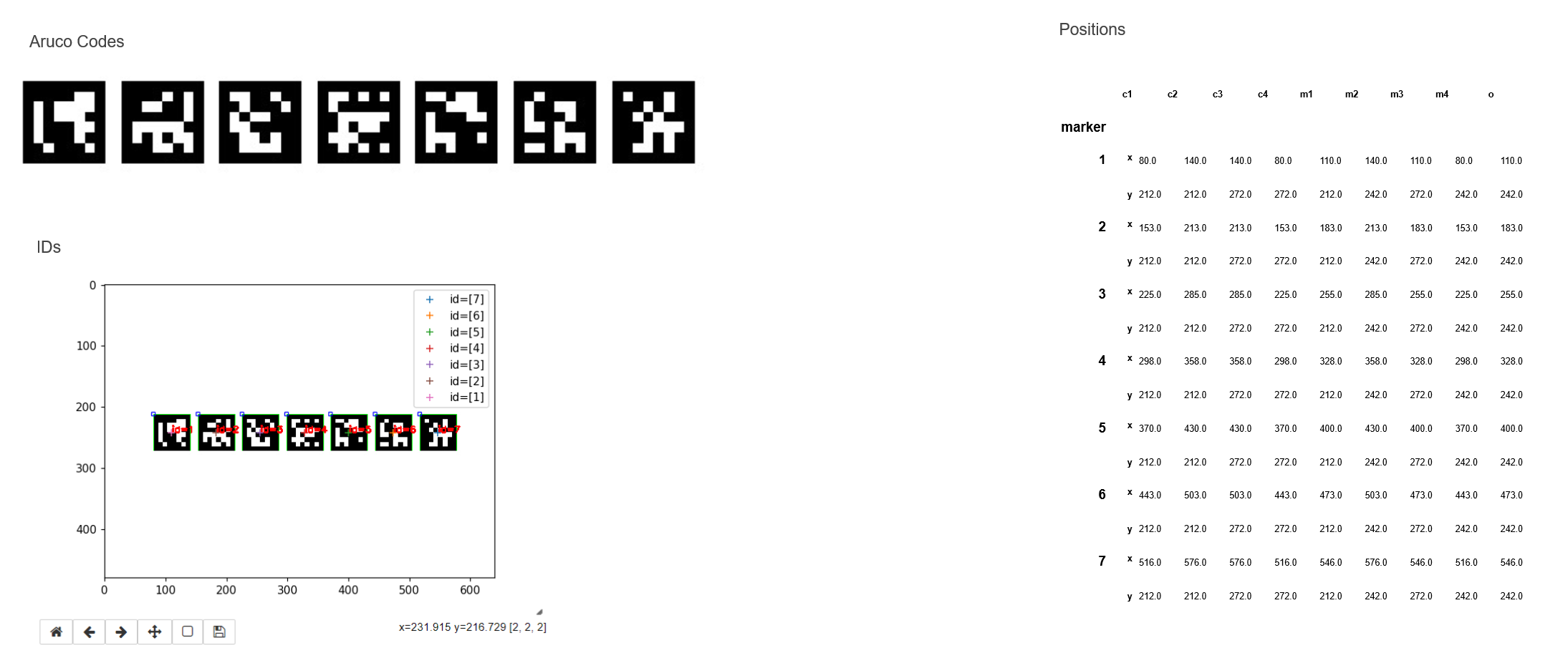
Open CV – GH
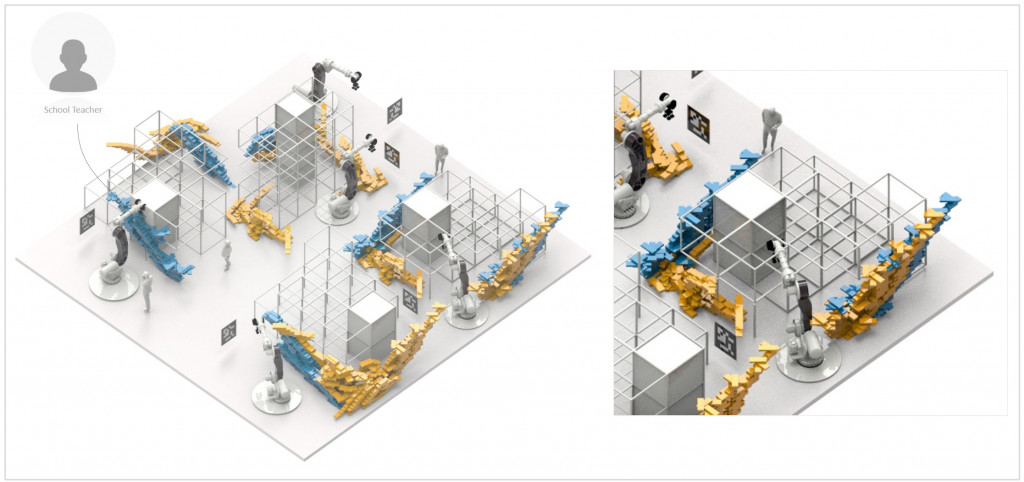
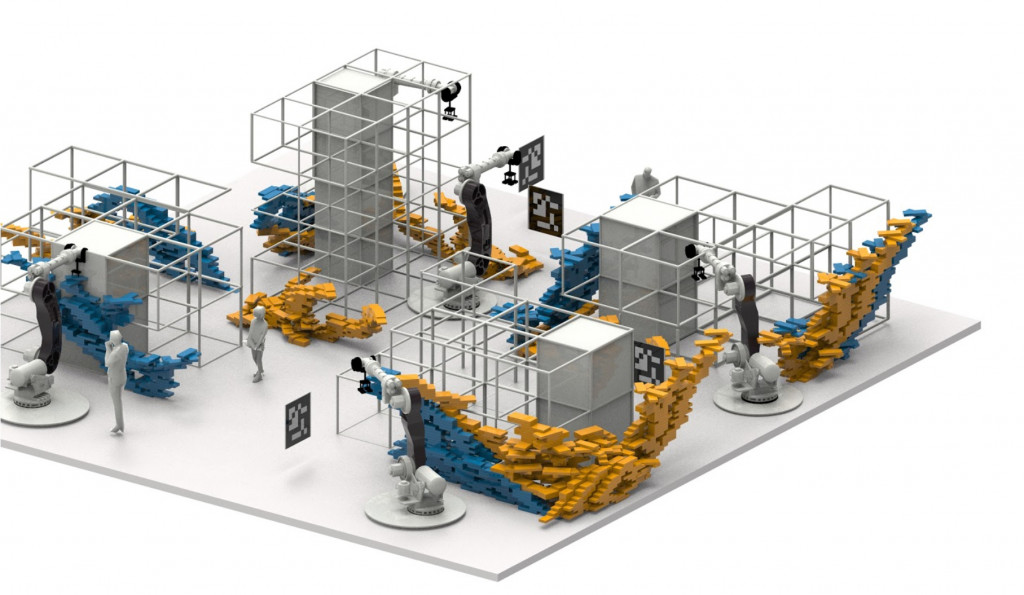
Future Vision
Vision – Setup
Students:
Lorenzo Masini
Cedric Droogmans
Elena Jaramazovic
Luis Jayme Buerba
Alexandros Varvantakis