A pavilion to navigate in the light and create an spatial experience related to the infinite.
In the Reflection Pavilion, the light is navigated through a group of mirrors, allowing the creation of a spatial experience related to the infinite.
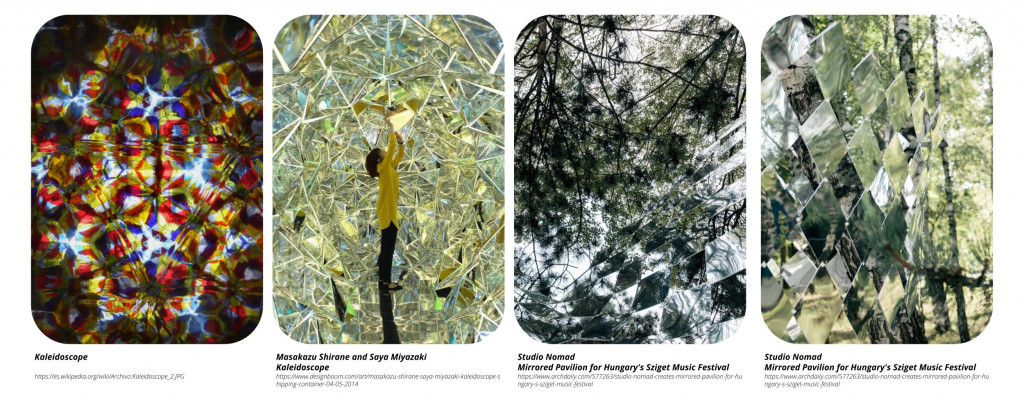
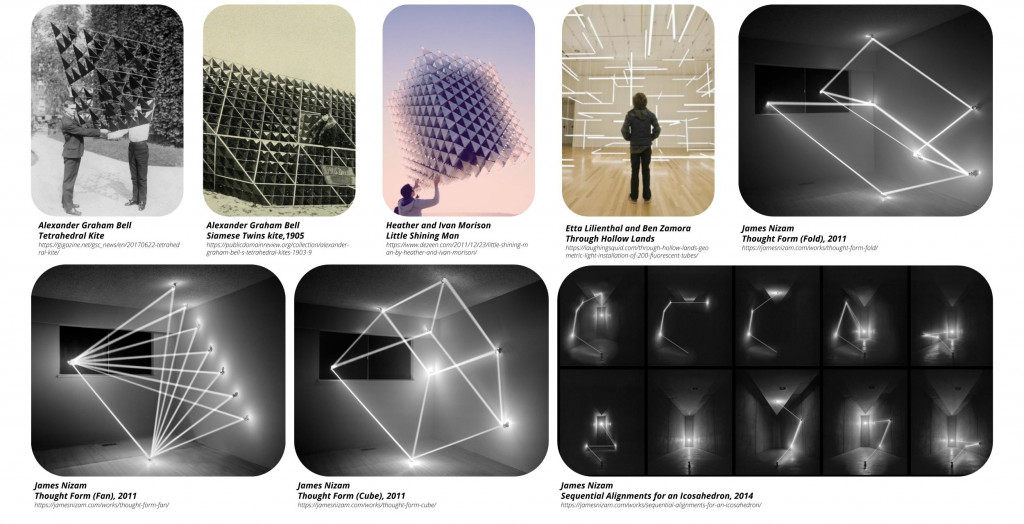
CASE STUDIES
Starting from the kaleidoscope that creates the illusion of an infinite pattern, the exploration split in two directions: the connection with architecture and the manipulation of a beam of light.
REFLECTION PRINCIPLES
The first step of the digital exploration was to gather the basic principles of the reflection. After understanding the connection between the input and the reflected line we can manipulate the reflection direction by rotating the mirrors.
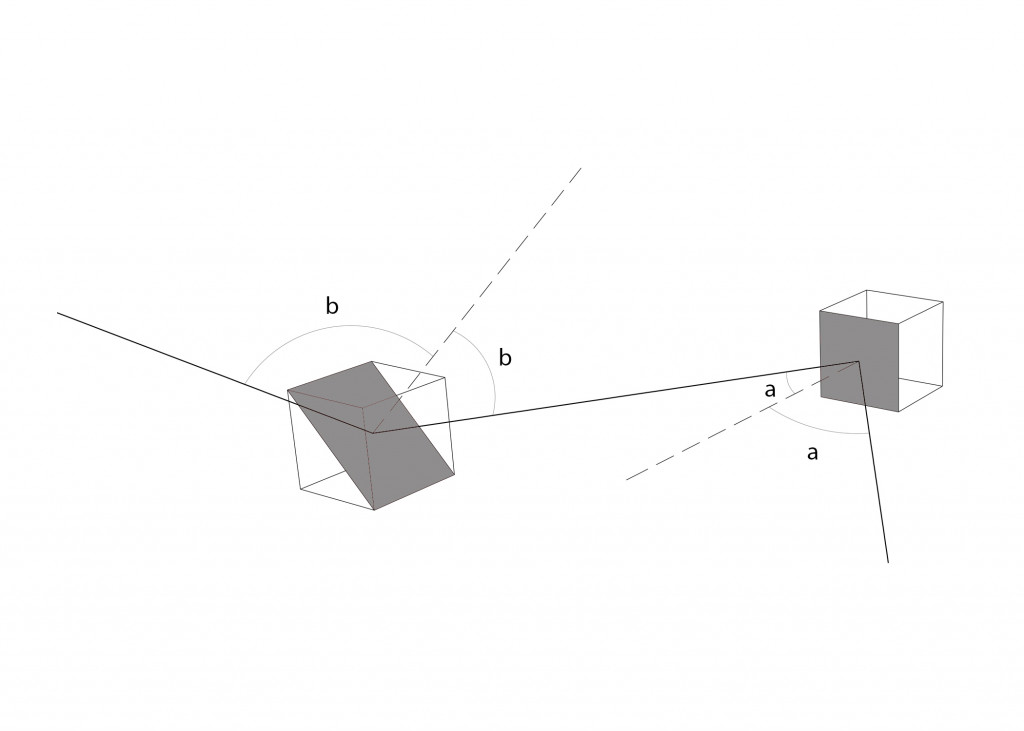
The angle of the reflected line and the mirror is the same as the angle of the input line and the mirror. The reflected line is mirrored from the perpendicular axis to the mirror.
Plane orientation related to the incenter of a triangle
INPUTS
As the system is a growth based assembly, the final shape is a result of a repetitive procedure. The desirable result is a continuous laser line, a group of mirrors rotated, in the correct plane and a support structure that holds the mirrors. As inputs for the loop a starting line and a boundary shape are needed. During the experimentation different boundary shapes and input lines were used, producing various results.
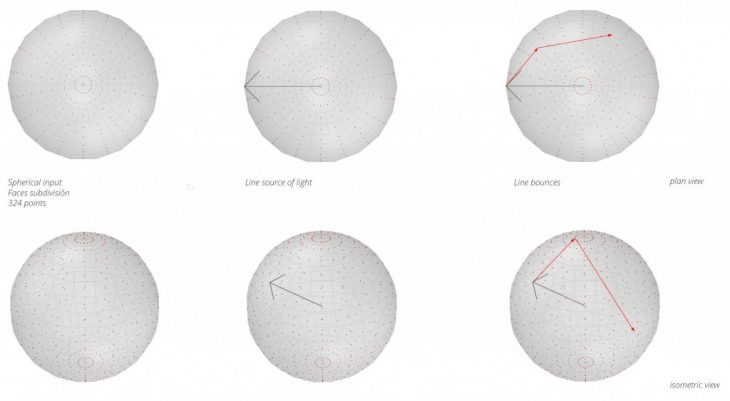
Input shape to define the points on the space to work with
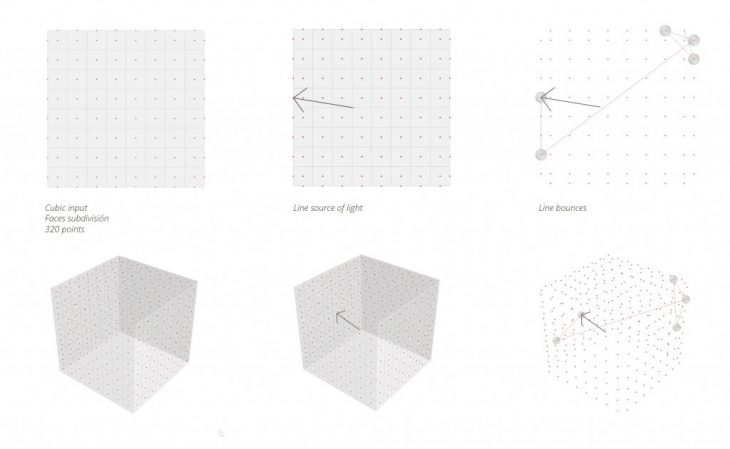
Input cubic shape to define the points on the space to work with
PROCESS
The workflow starts with the first loop that picks points from the boundary shape and generates a continuous line. Then the mirrors are added and rotated in the correct plane. During the first loop the definition checks if the new line that is about to be created hits an obstacle, if the new line hits an existing mirror and if the new mirror hit an existing mirror. If any of them is true no line and mirror is added.
 Obstacle revision |
 Revision if the new line do not hit another mirror |
 Revision if the new mirror do not hit another mirror |
Finally a second loop is introduced to generate the support of the mirrors. The support loop uses the center of the mirrors as targets and finds the closest path (through an orthogonal grid) to connect them to each other and the ground.
 Line bounce sequence inside faces of bounding box. |
 Line bounce sequence inside faces of bounding box. |
 Line bounce change sequence inside faces of bounding box when the source line change its position. Isometric view |
 Line bounce change sequence inside faces of bounding box when the source line change its position. Plan view |
Line bounce growth. Isometric view
Mirrors rotation adjustment
Support growth connecting mirrors. Isometric view
Support growth rules.
COMPONENTS AND CONNECTORS
To connect the mirrors with the support structure a ball joint is used allowing for a free rotation. The support structure is divided into equal sized linear components, that are connected through a rigid spherical connector.
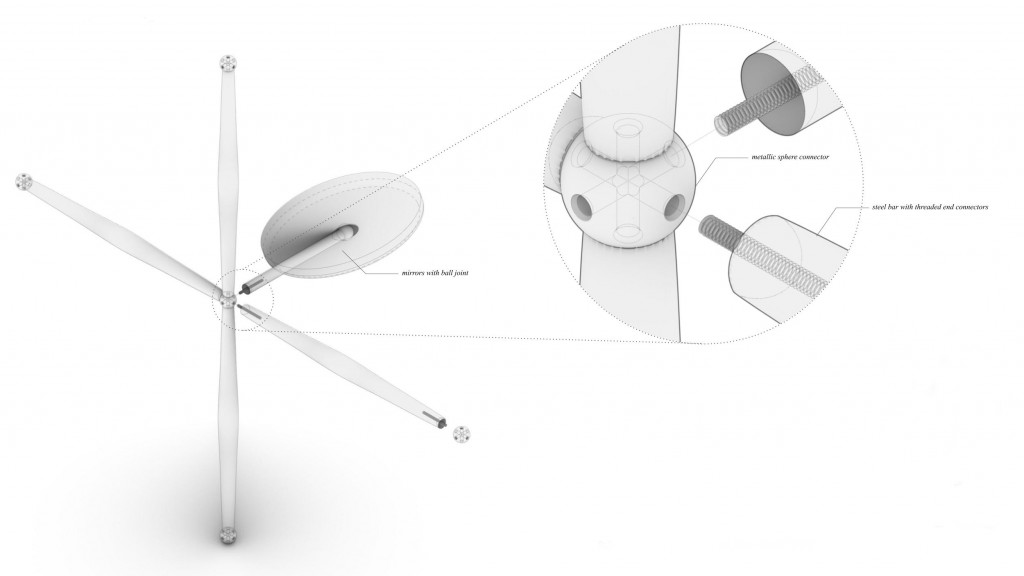
Connection system proposal based on an ‘out of the shelf’ componnent
The amount of mirrors define the different variations and though the spatial experiences that can be generated, allowing for infinite possibilities.
Image of the Reflection Pavilion
GROWTH-BASED ITERATIVE ASSEMBLY | REFLECTION PAVILION // SOFTWARE I is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at the Master in Robotics and Advanced Construction in 2020/2021 by:
Students: Alberto Browne, Juan E. Ojeda, Orestis Pavlidis
Faculty: Ján Pernecký
Faculty Assistant: Eugenio Bettucchi
