Image Capturing // Studio Support Workshop 2.2
Overview
This works was develop during the Studio Support Workshop that was consisted in learn two different digital tools, Homography with OpenCV and Point Clouds Analysis with Open3D.
Process Analysis
This project was related to the S.2 Software // Sparse Selection as a part of the process pipeline. We are proposing to streamline the process of capturing only the necessary data for an optimized point cloud. The idea is to check the image overlap of the drone’s onboard camera in real time and to only save the frames with the perfect overlap for the point-cloud creation (less, but optimized images for faster point-clout calculation) which will be generated in a post-process.
Image Capturing
The idea is to check the image overlap of each frame that is captured from the drone’s onboard camera and check each of those with the following for the perfect overlap to have only the necessary amount of data for the final point-cloud which will be generated in a post-process, extracting the frames in the post-process.

Post-Process: Image Selection
Data storage becomes more and more excessive. To keep the data for the point cloud creation as low as possible, our script tries to isolate only the necessary and high-quality images instead of an unregulated amount of data.
Python Script
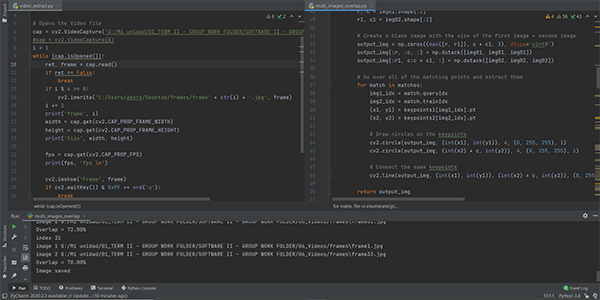
For point cloud creation it is recommended to have at least 60 – 70% image overlap. To make sure to store only the image matching this overlap a python script was created which measures the overlap by feature-detection and stitching of frames within an array. The process is similar to the creation of stitching panoramic views from multiple images and based on OpenCV, an open-source Python library.

Finded the best matches. After this, Warp and Homography process

Process of Threshold and Overlay analysis
Image Capturing // W 2.2 is a project of IAAC, Institute for Advanced Architecture of Catalonia
developed at the Master in Robotics and Advanced Construction Studio Support Workshop in 2020/2021 by:
Students: Hendrik Benz, Alberto Browne, Michael DiCarlo
Faculty: Soroush Garivani