Objective
The objective was to understand the potentials of simple pick and place, learn about working with robotic manufacturing, and to expand its horizons.
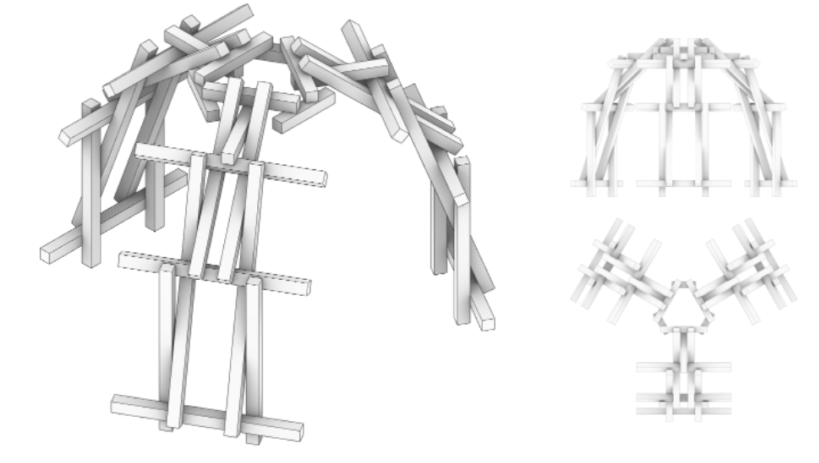
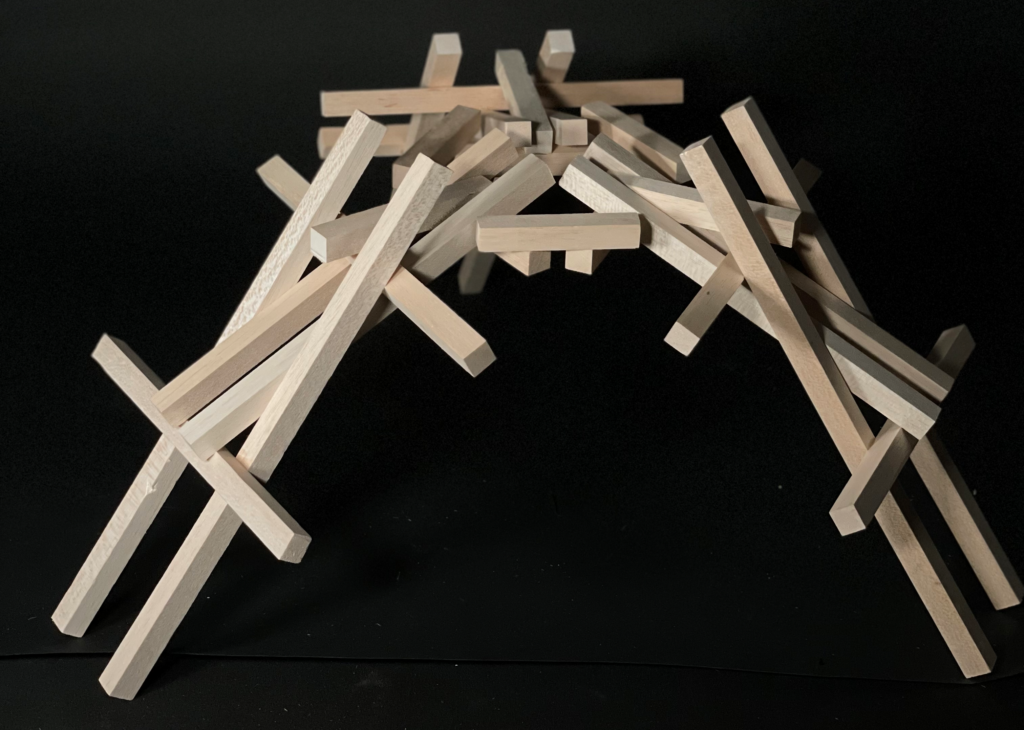
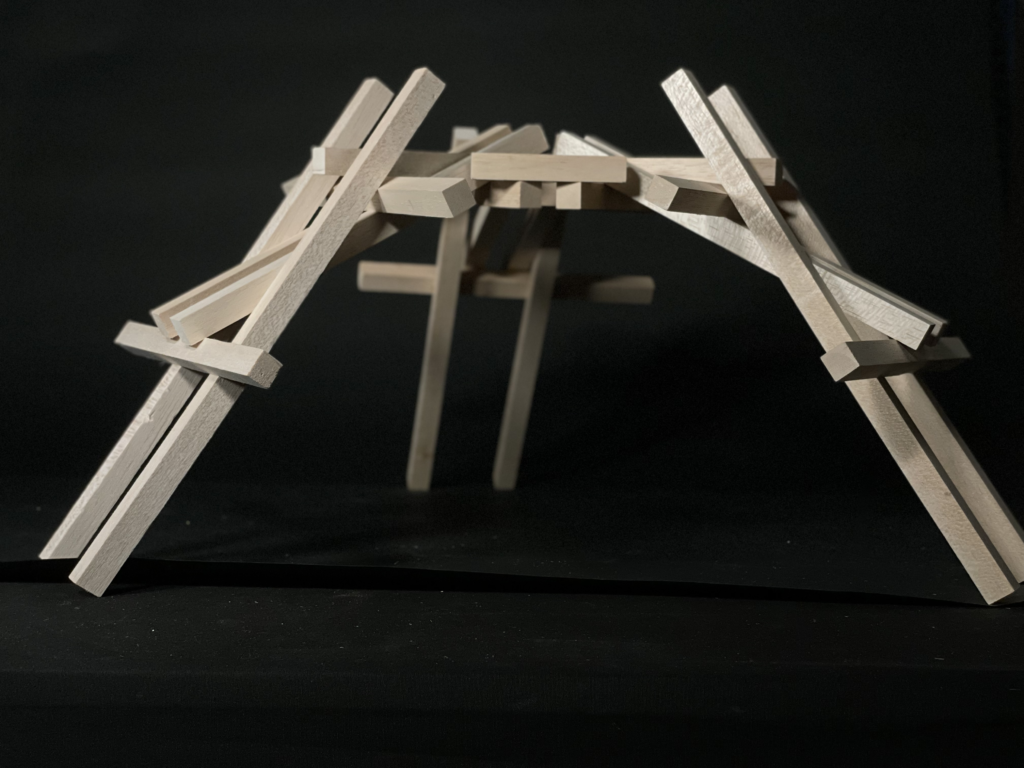
The task was to create a catenary funicular geometry in a 3-dimensional manner that ensures ease of assembly. The challenge was to achieve this with modules created in a 2-dmentional plane.
Stick Configuration
Starting off with the basic 300mm sticks, a number of other lengths were added to introduce flexibility into the module assembly.
Modules
Module Connections

Digital Exploration
Simulation and Production

Final Production


Credits
INTERLOCKING PICK & PLACE is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Advanced Architecture 2020/21 by Students: Aishwarya Arun, Furio Magaraggia, Perniyal Waseem, Preetam Prabhakar; Faculty: Ricardo Mayor, Lana Awad, and Student Assistants: Liang Mayuqi