The MatterSite project focuses on automating acquisition and analysis of material data to promote material reuse from demolition waste streams. This occurs at two main scales; firstly a site scale, to determine location, volume and accessibility of re-usable materials before demolition occurs, and secondly an element scale to extract exact dimensional, qualitative, and aesthetic data from individual pieces post-demolition.

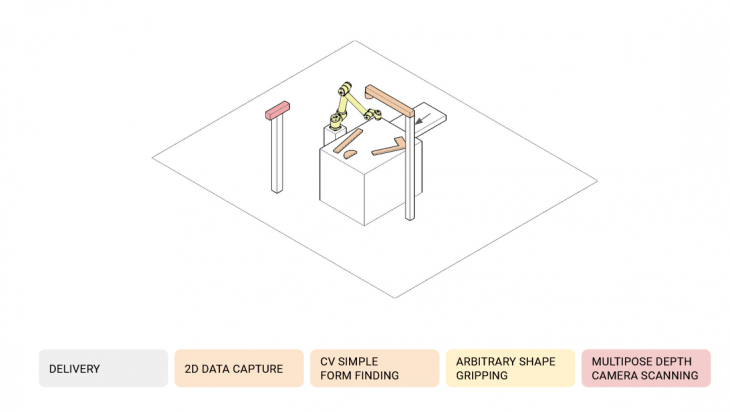
This project outlines an initial proof of concept for the systems involved in this element analysis scale. For this reason, it covers a single relevant material from a single source, in this case the IaaC Digital Urban Orchard Pavilion, disassembled in 2021. Recovered materials consist of timber framing with a 45mm cross section, ranging from ~50cm to over 2m. With this stock, analysis and sorting will be carried out with a Universal UR10 robot, standard pneumatic gripper, and Realsense D435i camera.
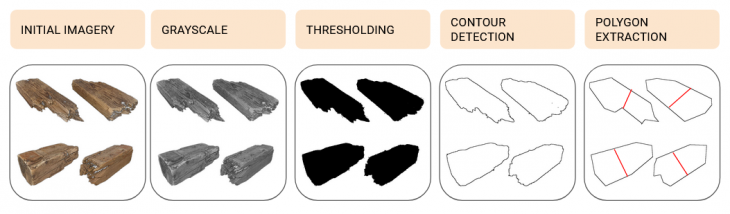
Materials are added to the workcell unsorted and in bulk. Initially, the robot will take a simple image capture of the material pile, and apply contour detection to determine how to initially pick up a new piece. From here, the robot uses its internal torque sensors to measure the weight of the piece, later used with the measured volume as a measure of possible decay. The robot takes several scans of the pieces with an RGBD camera, which are automatically aligned to form a complete point cloud, then mesh of the element. The point cloud is also used to render image textures of each face, which are used for nail hole detection and aesthetic considerations in later design usage.
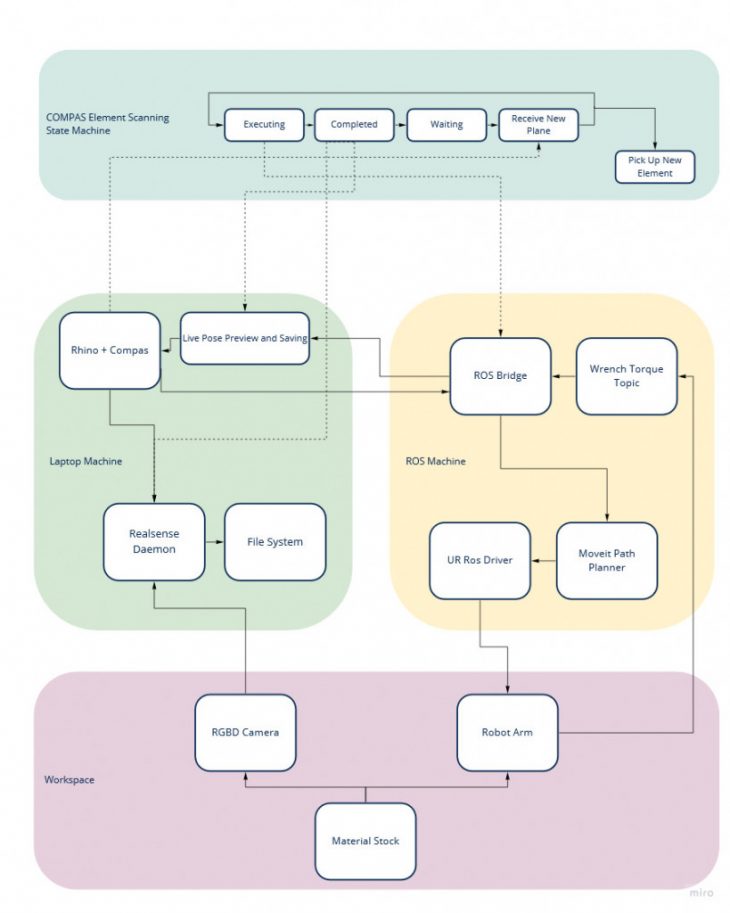
As the system deal with multiple unknowns about the materials as they are input, it uses a live system of control. Starting with the UR10’s inherent live-control capabilities, the system uses ROS for communication between different components, MoveIt as a live path-planning system, and CompasFab as a connection system between the Rhino/Grasshopper interface and ROS. As Grasshopper doesn’t possess normal control-flow features, the synchronization between robot movement and data capture must be performed using a simple state machine system, advanced whenever the Compas backend receives new live pose data from the robot.
MatterSite is a project of IAAC, Institute for Advanced Architecture of Catalonia developed in the Master in Robotics and Advanced Construction 2019/21 by:
Students: Matt Gordon and Roberto Vargas Calvo
Faculty: Raimund Krenmueller, Angel Muñoz, Soroush Garivani