</p>

By combining an ancient earth construction technique with cutting edge robotic technology, this project hopes to spark a discourse on how future construction practice can allow for the erection of buildings using materials sourced from the site itself- bringing a whole new meaning to the term “zero kilometer material”. The prototype measuring 122x82x60cm is constructed using only natural raw materials such as mud, stone aggregate and jute.The direct implementation of materials found on site introduces a whole new range of possibilities with regards to material usage and resource efficiency. This is also a feature which adds architectural value, in which the structure appears to grow out of the landscape, sharing the very same DNA as the site itself.

Set in a rural or suburban context, we imagine the shell being nestled in between the trees. Due to the shell’s playful geometry, we envision it to be used for public and creative functions. The shell could be used as a gathering space, for meetings, dinners and brainstorming. This space could also function as a place for solitude and inspiration in the forest. In a real architectural application, the windows would be framed and sealed off to keep the weather out. The circular windows grant the viewer a variety of perspectives to view the forest from, together with glances of the sky peeking through the tree canopy.

As a full-scale permanent structure the wall thickness would have to be increased substantially, perhaps up to 300-400mm. A more precise figure would have to be determined through an advanced structural evaluation, optimizing material usage in order to ensure a shell with an efficient structure and a slender cross-section. In a full-scale application the robotic fabrication technique used here will face challenges related to scalability. Due to the fact that the Kuka robot arm is a fixed, floor-mounted unit, the size of the structure is currently limited by the range of the arm. In future construction this challenge could be faced using a swarm of smaller, more mobile robot units (either Fanuc or Universal robots) rather than the larger, stationary models commonly used in the automotive industry. Since several small robots would be required to perform the task of the larger robot, each robot would either be given a designated task or area of the larger structure to work on. The multiple robotic trajectories would have to be carefully orchestrated to work in synchronization. The great variations and complexity that each construction site offer, combined with the process of working with a material that deforms during the construction process calls for solutions where the robotic units are equipped with responsive sensing intelligence to provide real-time feedback for adjustment and tolerance purposes.
FABRICATION PROCESS

This earth shell is supported by three legs. Each of the three supports is constructed by three reed branches. The outer members curve towards the adjacent support to create an arch, whilst the central branch crosses to the opposite side of the structure which terminates on the opposing arch. This was done in order to create an intermidiate nurb in the fabric structure, inspired by Gothic geometries as well as to reduce the unsupported spans. This also enables each of the support points to achieve the rigidity of a tripod. The Perforation logic of this earth shell, draws inspiration from the principles of sea shells. The circular geometry of the aperatures gains its strength through the curvature. The idea behind using circular openings in the fabric, was for there to be an equal tension force distribution in all directions. Two sizes of circles were selected for the perforations, the larger circles were placed in the larger spans, and the smaller placed respectively.
Robotic spray trajectories
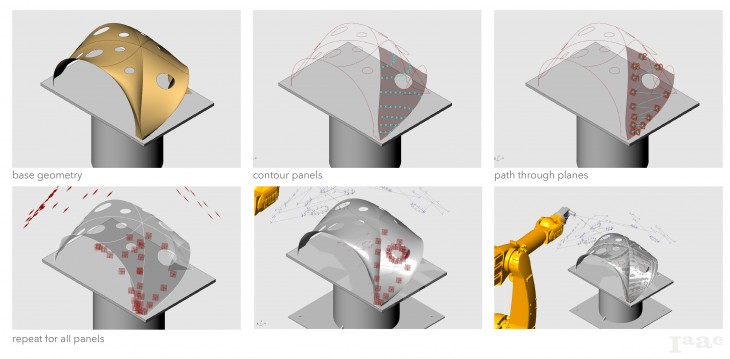
In terms of the computational aspect of the project, the shell was digitized using photogrammetry as a technique for 3d scanning. Once the digital 3d model of the shell geometry is made, this can be converted to a mesh in Rhino and Grasshopper. The mesh is subdivided and we can find the face normal and center point of each mesh subdivision. These points are interpolated and used to make a robot trajectory that allows for accurate and appropriate distancing between the nozzle and the shell- ultimately ensuring a thin and even layer of mud. The trajectories were carried out in a continuous movement while the speed of the Kuka KR150-L110 robot was used as a parameter to allow variations in layers thickness.
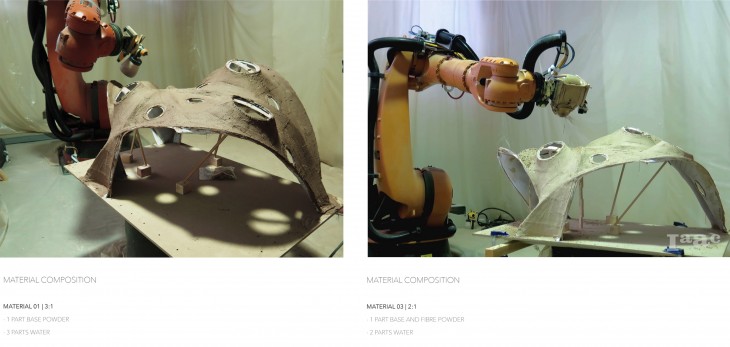
Mud application
01 Light mud spray and manual mud application:

02 Robotic light mud spray and Robotic earth/fiber spray:
03 Manual jute reinforcement and Clay finishing:
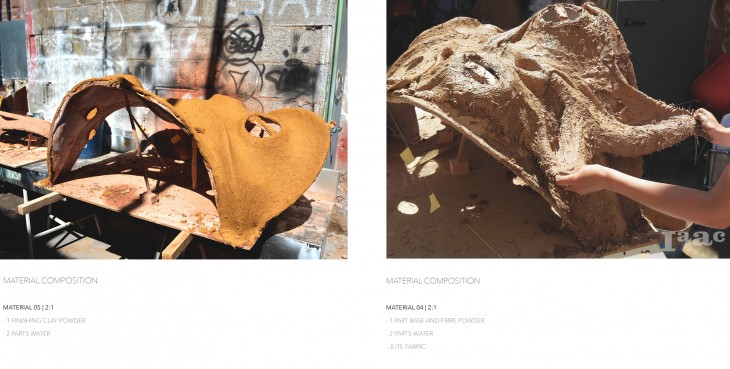
04 Manual removal of framework:

05 Robotic hydrophobic gel spray and Robotic drying:

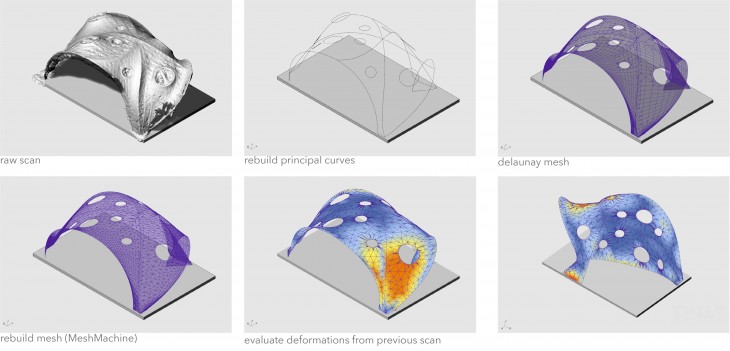
Continuous 3D scanning for evaluation purposes:
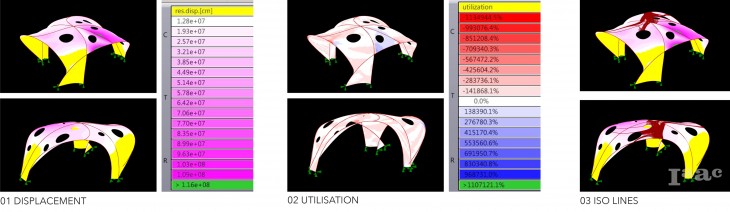
Structural analysis using Karamba for Grasshopper:
Mudshell Prototype is a project of IaaC, Institute for Advanced Architecture of Catalonia
developed at Master in Advanced Architecture in 2016 by:
Students:
Jessica Dias
Noor El-Gewely
Abdullah Ibrahim
Peter Magnus
Burak Paksoy
Faculty:
Stephanie Chaltiel
Djordje Stanojevic
Yessica Mendez
