Path Planning and Self Organisation
Neural Network enabled path planning of swarm agents to autonomously navigate environments.

Neural path planning and self-organisation is an exploration of swarm behavioural systems emerging on a simple or complex set of design rules and references between agents. The project aims to investigate the training of a neural network from basic setup to organising multiple agents into any configuration for effective navigation of any environment.
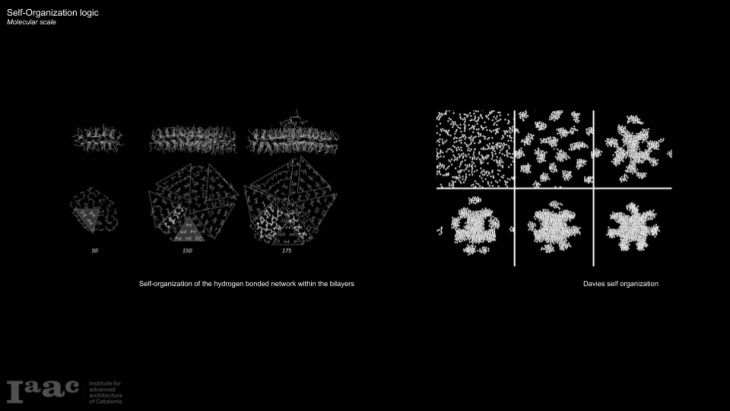
From this the project, took its inspiration from biological sources, the fire ant ( in the first picture). Due to these small behaviours of the agent it results in larger emergent organisational properties. The project aimed to get to this goal based on simple inputs and specified trained behaviours.
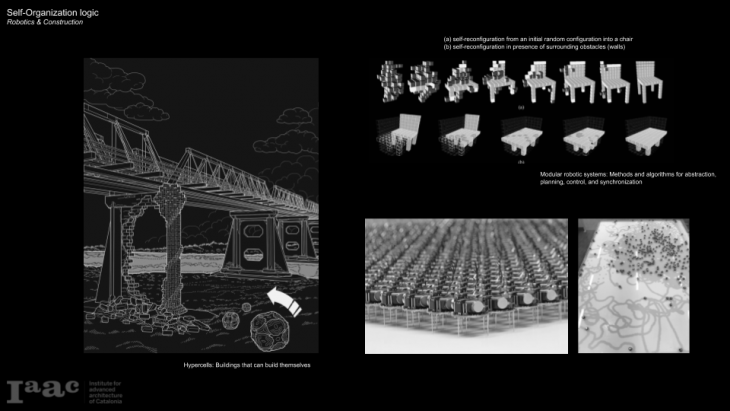
From this the project established a platform which could be enabled by the hardware precedents it took inspiration from. The kilo bots and the hyper cube were two major projects with the hyper cube’s implied molecularity becoming a key component. From this an objective of navigating a context in order to reconfigure, reinforcing or creating supplementary structure to a target specified area.
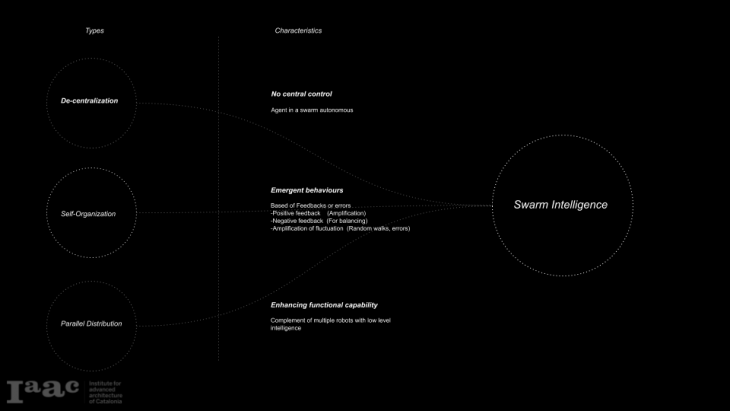
Mainly there is three types of swarm intelligence: de-centralisation | Self-organisation | Parallel distribution. For our case of study, we will focus in the self-organisation, in which we will explore the emergent behaviours, based on positives, negatives and amplification feedback/errors.
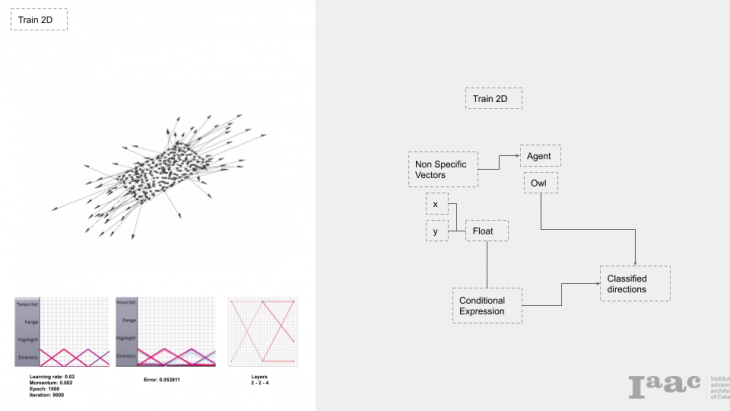
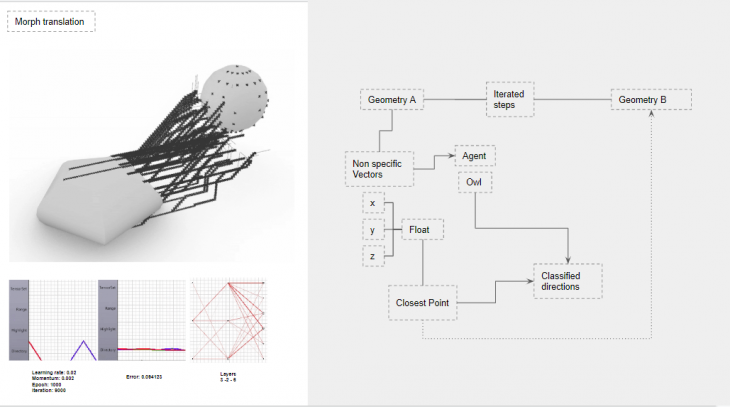
From this came an initial investigation into training the network to go from point a to b. This was to understand the input of the deconstructed elements of an input vector first in two dimensions. With these first 4 inputs the network passed it through a conditional expression classifying the input vector into a set of corresponding 4 directions, forward, back, left and right. This was then trained with a larger sample of a hundred randomised vectors until the network could now classify any vector into a single directional decision.
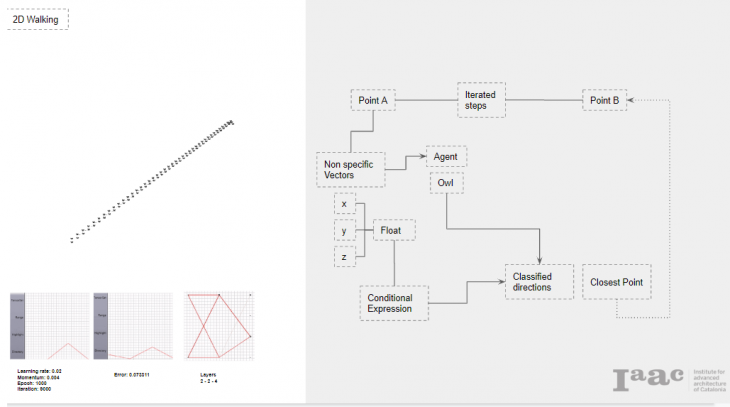
From this the singular vector was then broken up into the constraints of the agent, in this case a 2 unit step in 4 directions. This then meant that the network has to make a decision and then move to the position closest to the target and reclassify the new vector based on the this redefined vector.

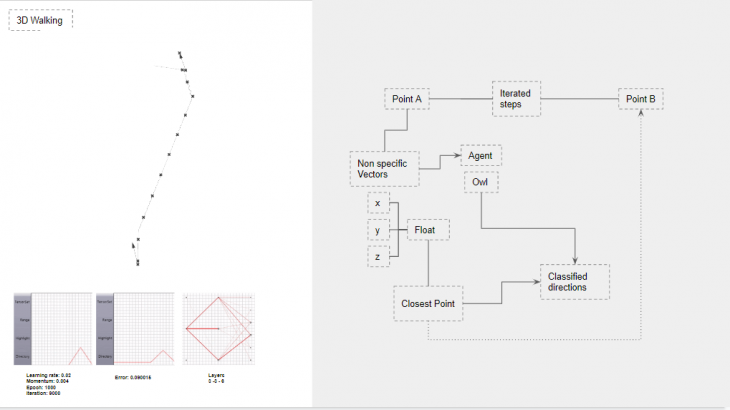
From this two dimensional walking the next step is to expand the network into three dimensions by expanding the classification from 6 inputs into 1 direction out of 6. From this it is the same as the initial training with a modified conditional expression with a third class. Furthermore this then iterated as before into steps so the swarm agent can now navigate in 3 dimensions.

The next idea was to introduce some form of reactive context with which the agent could navigate based on its own closeness criteria. Therefore through the introduction of multiple initial start points and allow them to navigate to find the most easily accessible support end point.
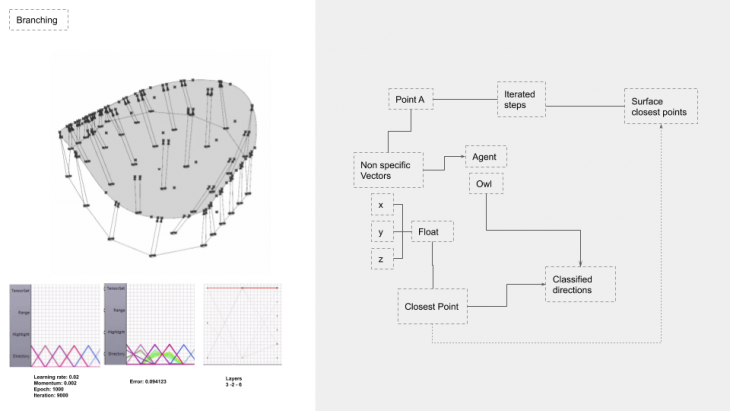
From this an addition of complexity in order to add some form of self organisation the addition of sensitivity of clustering between initial agent starting points as compared to the density of the closest point on the surface. In order to allow the agents to evaluate between the most efficient and most equidistant spacing on the surface.
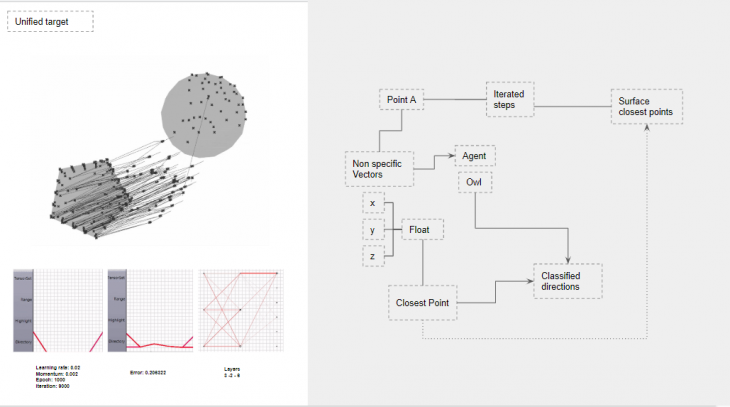
This then setup the main task of the network. To navigate from an initial configuration to an assigned configuration to fill. From this experiment each agent had its calculations and decisions however its guiding vector that is being classified is averaged amongst the swarm. This smooths their trajectories and softens their path.
 Finally the last experiment into communal voting between agents where a “leader” agent is classified out of the swarm at every stage of its movement as the best to use as the reference point between the swarm and its respective targets.
Finally the last experiment into communal voting between agents where a “leader” agent is classified out of the swarm at every stage of its movement as the best to use as the reference point between the swarm and its respective targets.
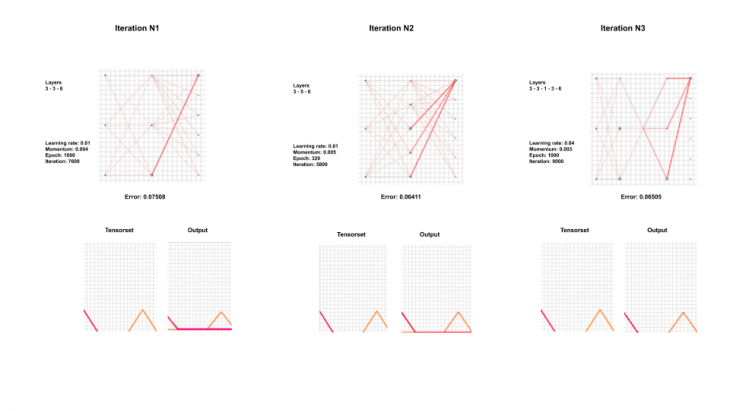
This allowed us to introduce randomised context and train the network to handle newer geometries and so we trained a deeper more precise expanded network from this model on the third iteration.
This project allowed a ground up understanding of the decision based training needed to set up these behaviours and thus an insight into the complex behaviours in nature.They stand as the long serving highly adapted protocols of a distributed system that can preform complex tasks. This could be useful in such a structure native software as GH and Rhino, this may allow for more expanded use of artificial intelligence swarms within industry and construction.
Path Planning and Self Organisation is a project of IaaC, Institute for Advanced Architecture of Catalonia
developed at MRAC in 2020 by:
Students: Jun Woo Lee, Abdullah Sheikh
Faculty: Mateusz Zwierzycki, Soroush Garivani