The project refers to active wood bending using robotic manufacture with a facade being the final aim of the exploration. The procedure is divided into three stages starting by streaming the wood, bending it with the use of the robot and finally mounting it in a position until the material gets back it rigidity. The investigation started with an analogue approach by steaming the wood then bending it with our hands on a fixed structure while it gradually evolved to a fully robotic process.
Using robotic force while respecting the properties of the material outcomes were immense in terms of production, accuracy and overall quality. Starting from two dimensional to more complicated three dimensional bends we created a catalogue of design possibilities ready to be applied on this challenging task of re-design the facade of Plug-in building by Mia’s architects.
This study opens the discussion of how wood bending using robots can have a different architecture impact, reconsidering the role of the architect, his/her tools and suggesting ways which robots can co-exist in the construction spectrum of the 21st century.
</p>
Analogue vs Robotic Manufacture
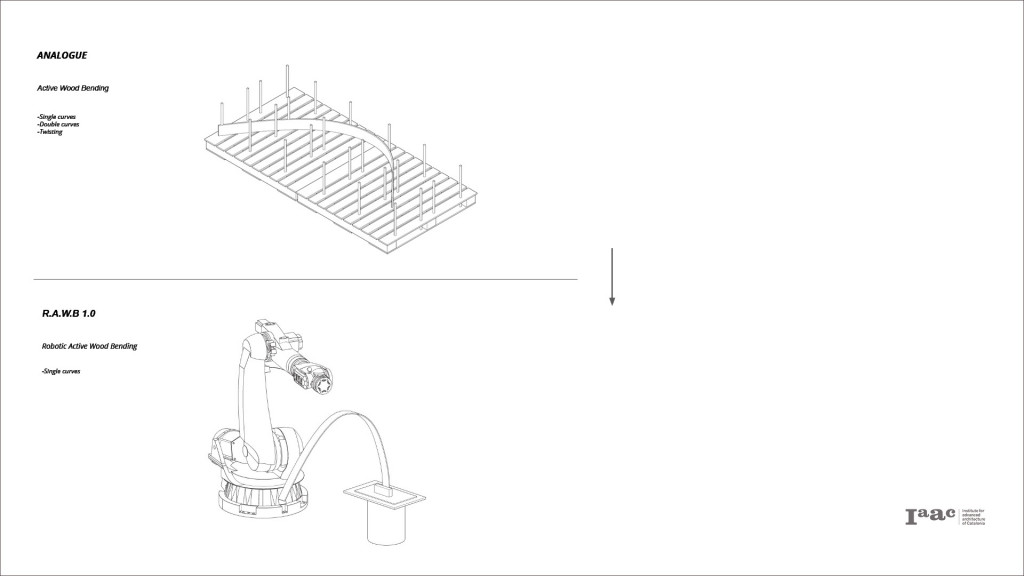
Analogue exploration result

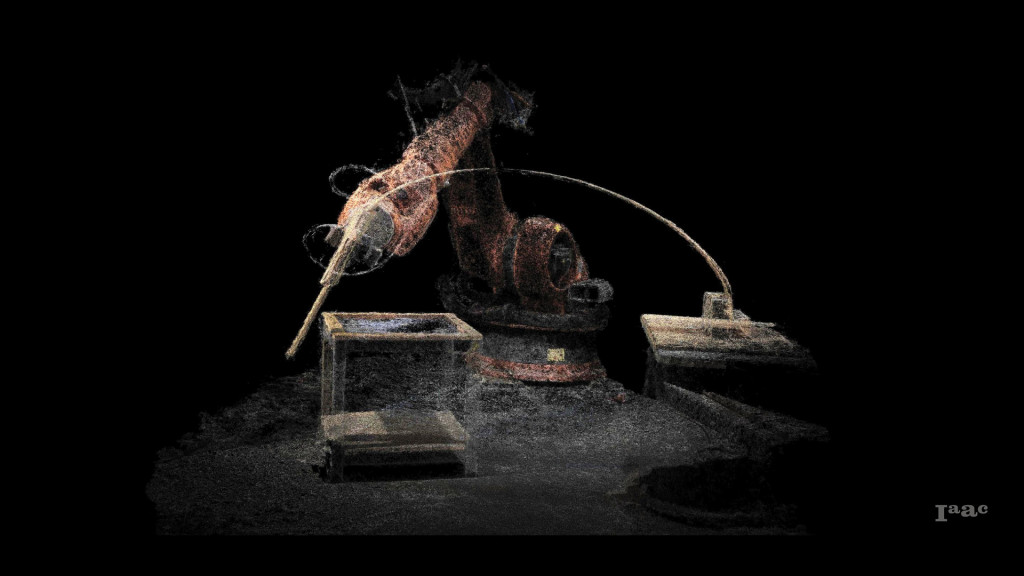
First robotic exploration process

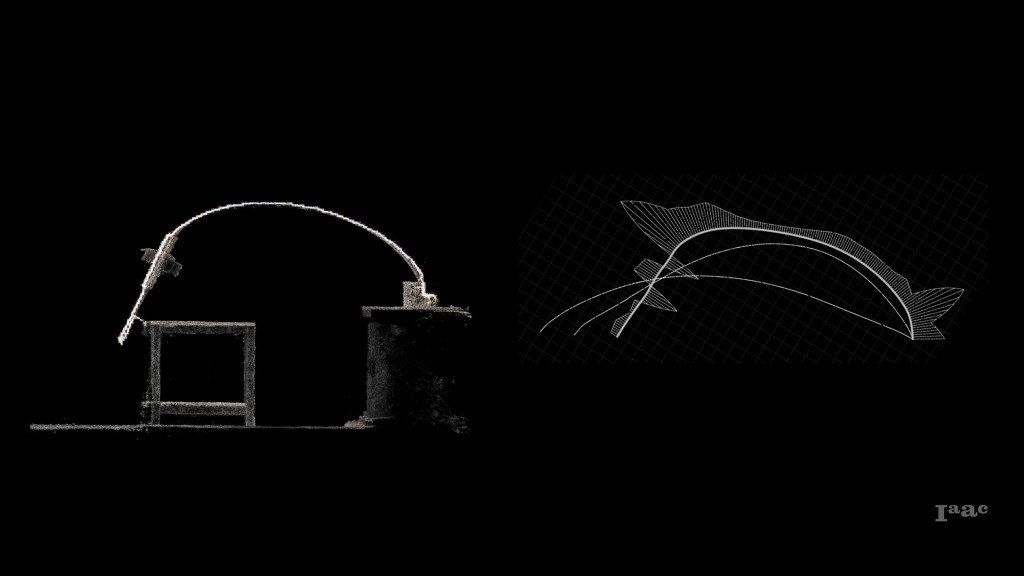
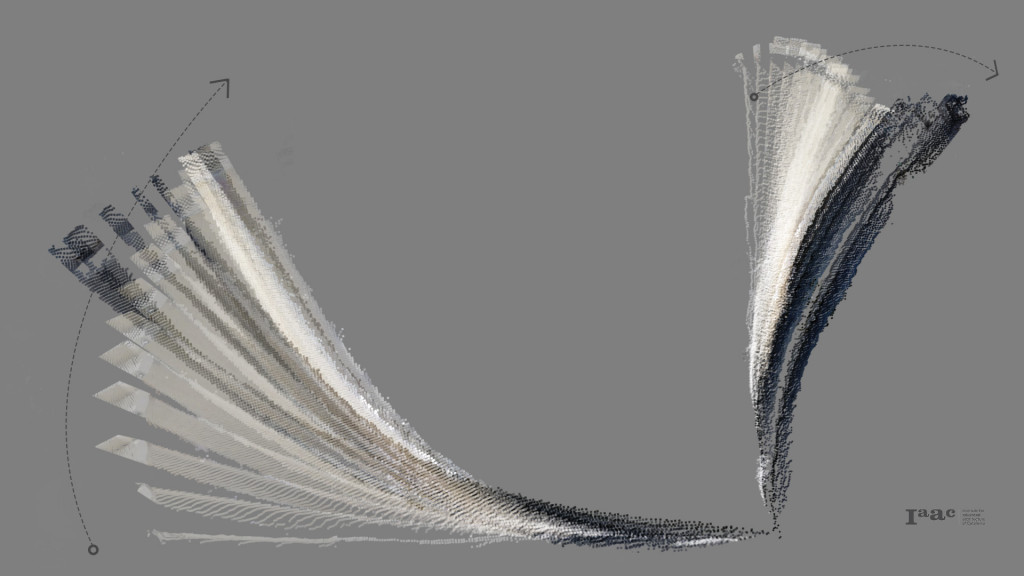
Photoscan of the results
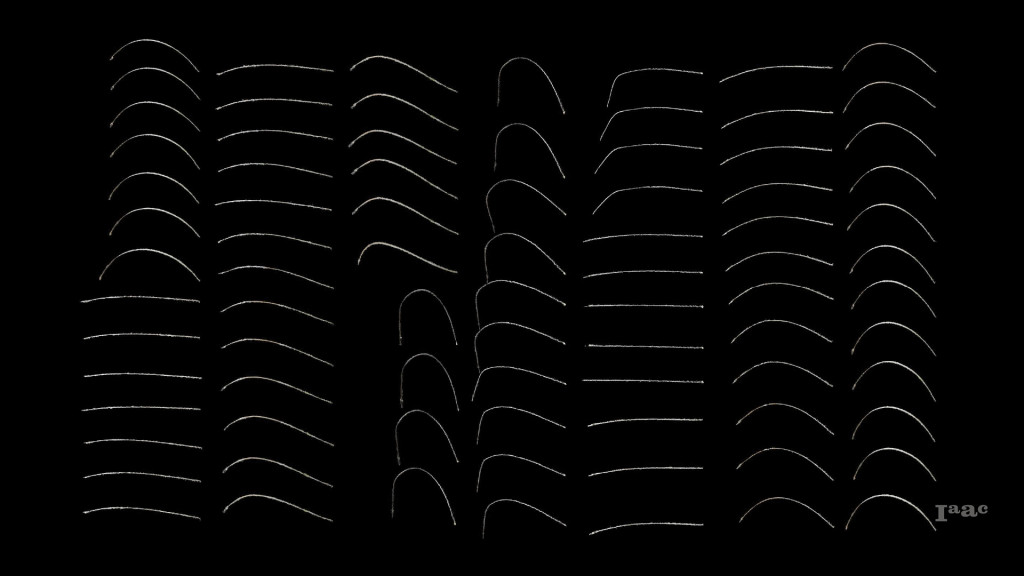
Data single curves
Robotic bending with data collection V1
Data single curves
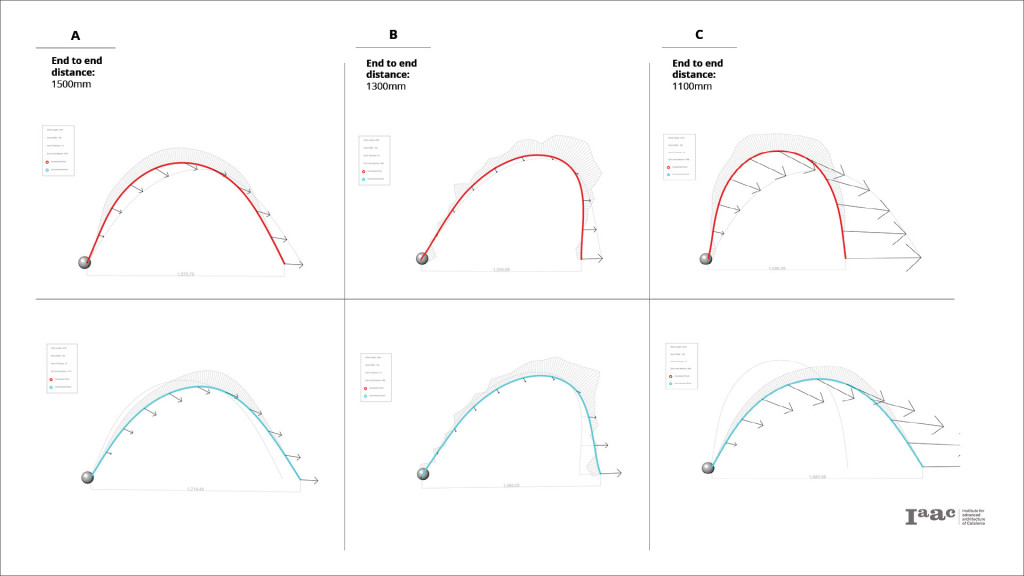
Robot path curvature vs end result curvature
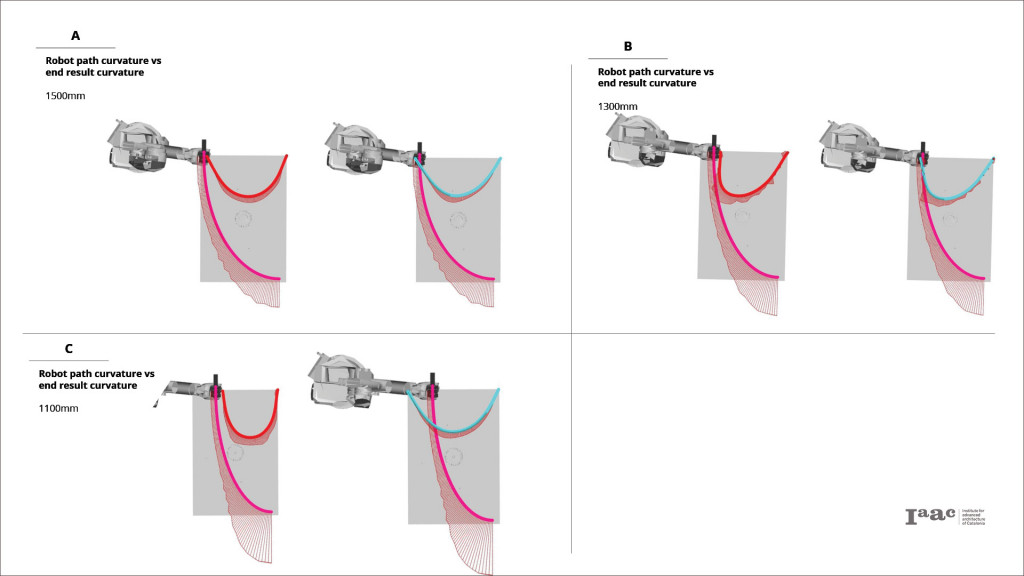
Robotic exploration result

Robotic bending with data collection V2

Data single curves collection
Setup double curves

Data double curves
Data double curves

Facade Prototype 1

Fabrication constraints – Design possibilities – 2D aggregation
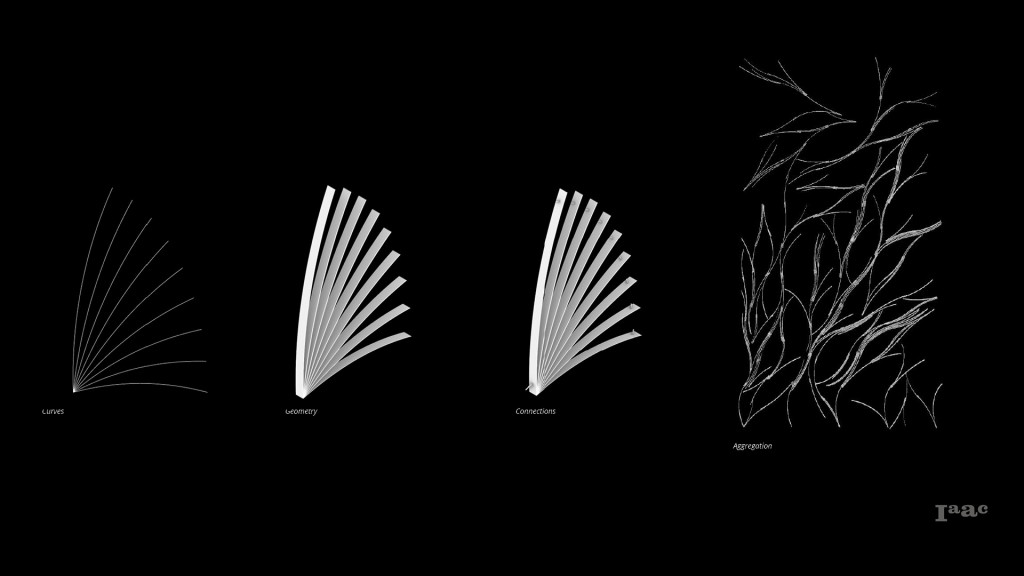
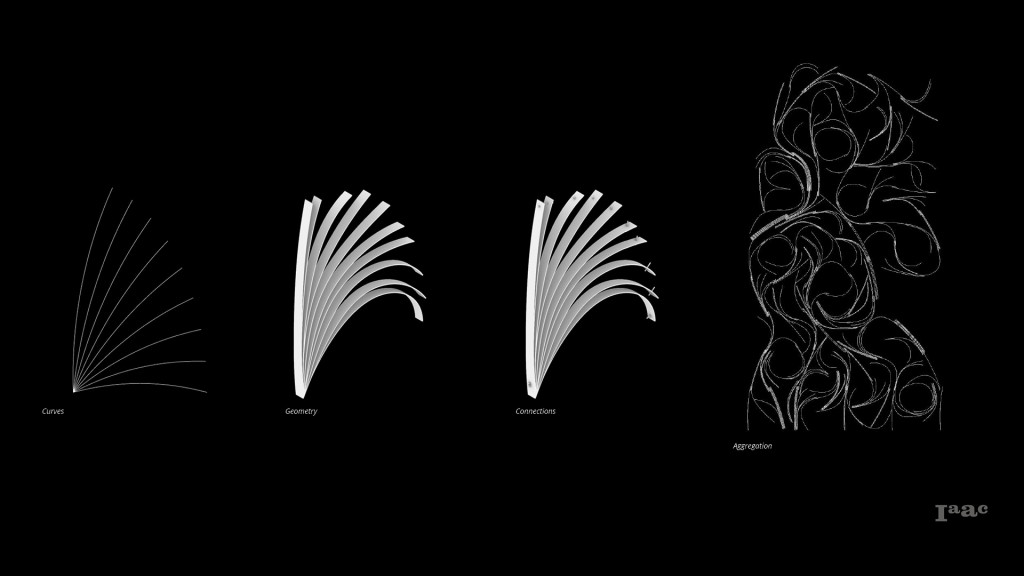
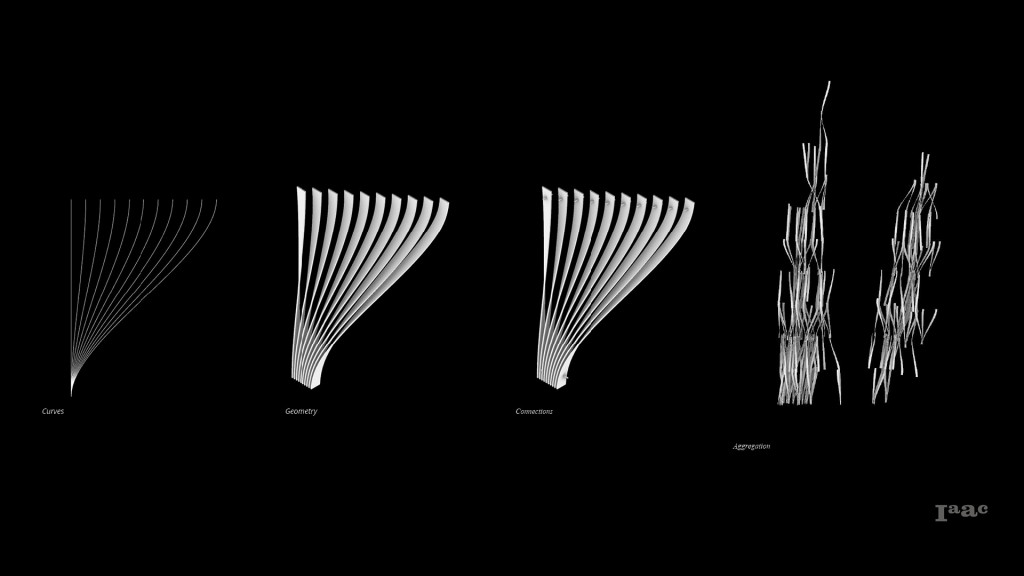
Fabrication constraints – Design possibilities – 3D aggregation

Agent based system without environment.
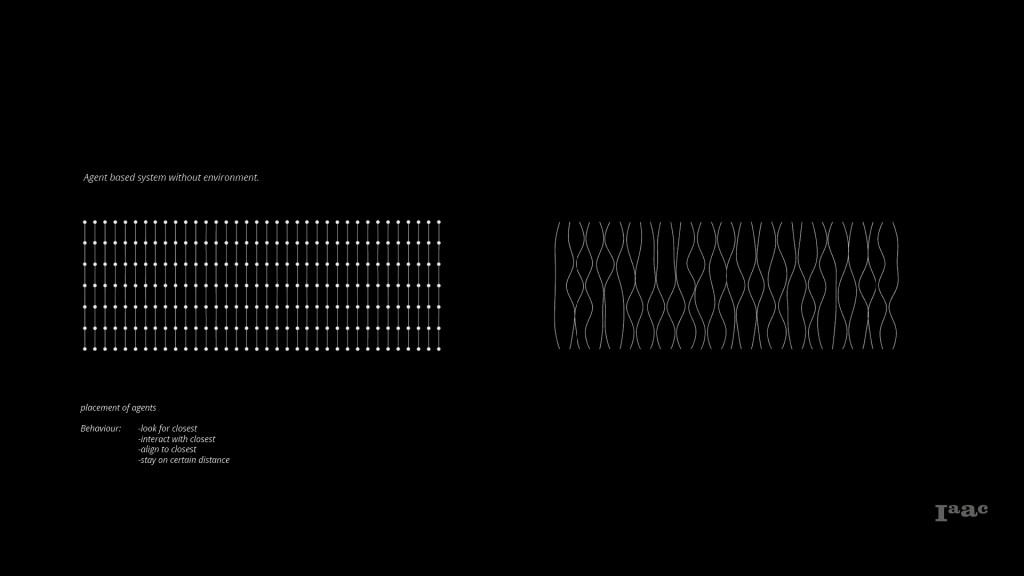
Design Strategy – Agent Based System – Rules Catalogue
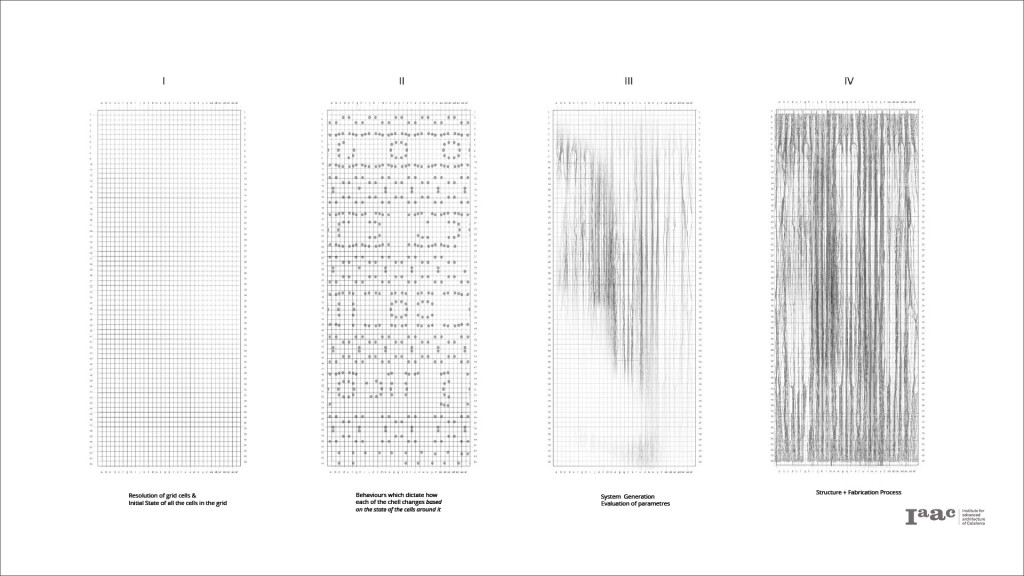
Rules – Lines direction
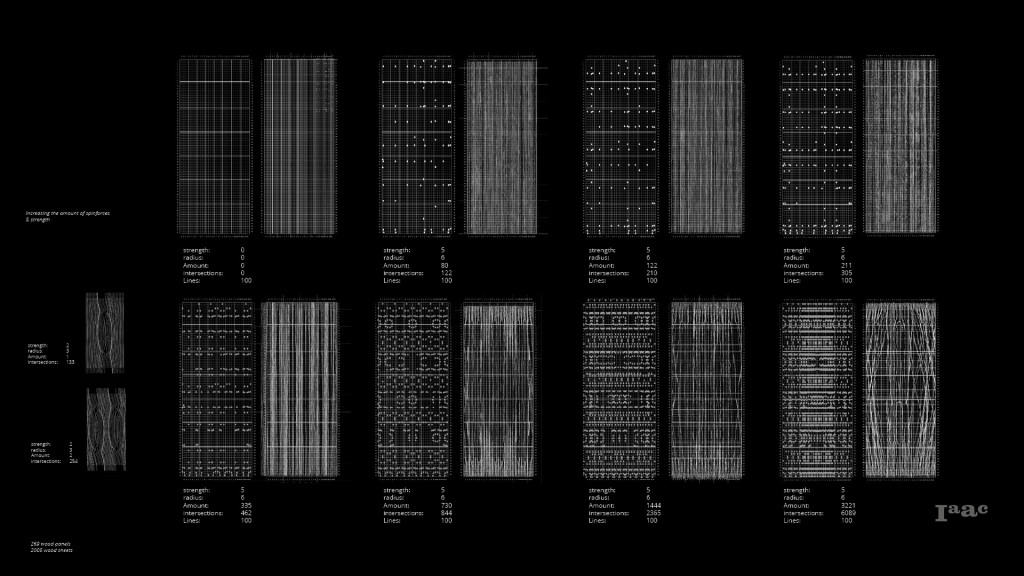
Line Density

Line Density – Views

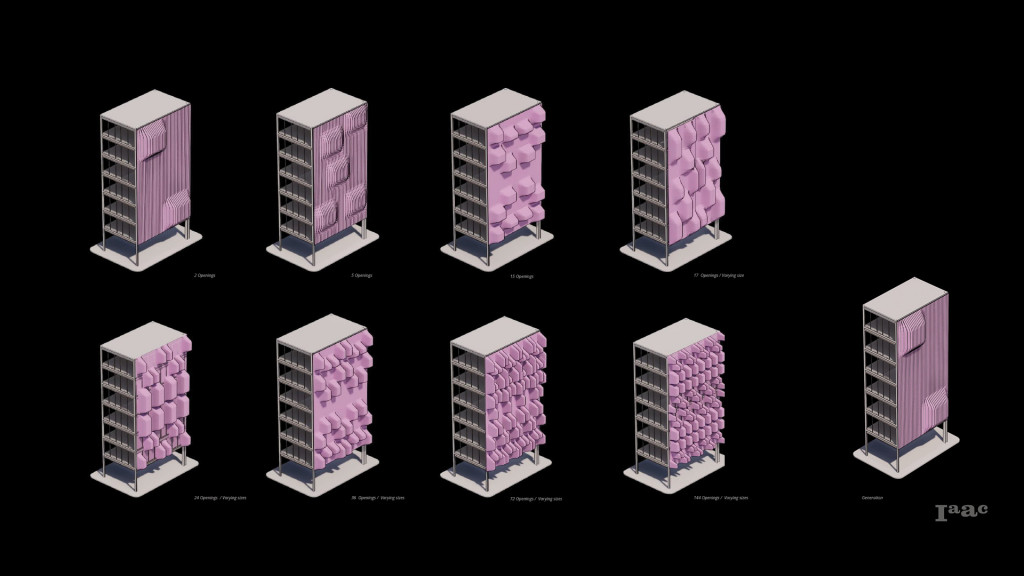
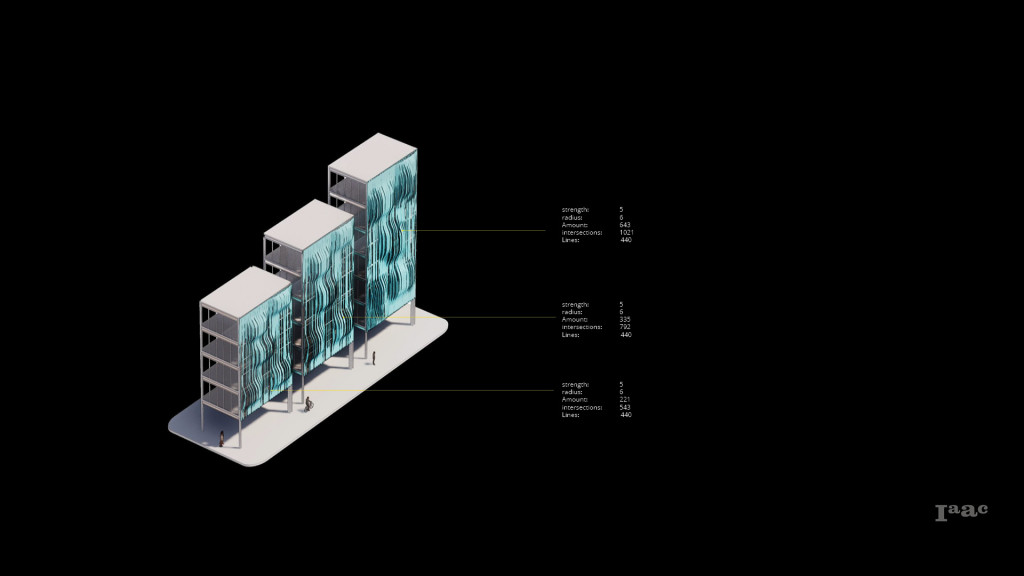
Surface Generation – Amount of Openings
Rules – Length
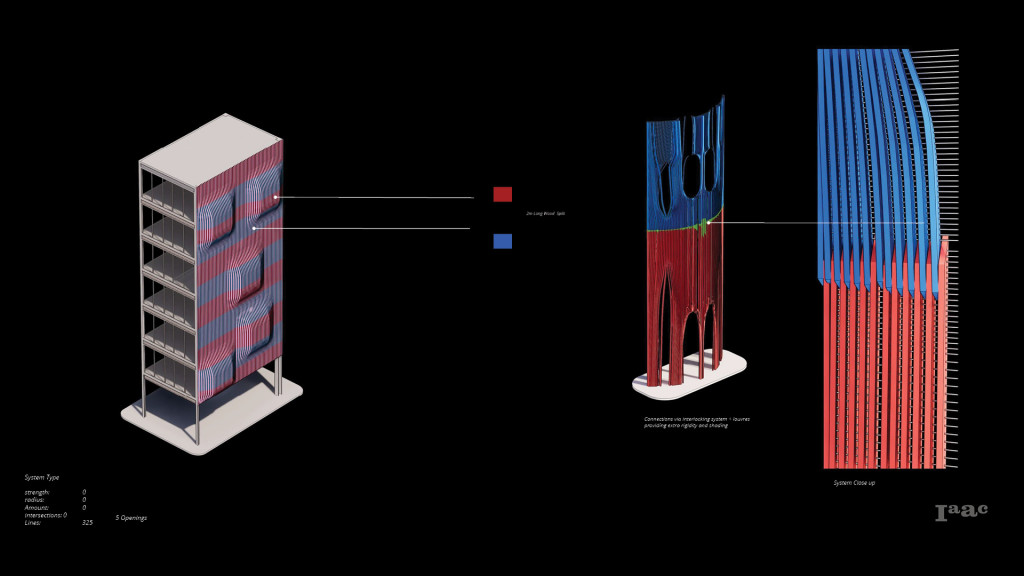
Overall System
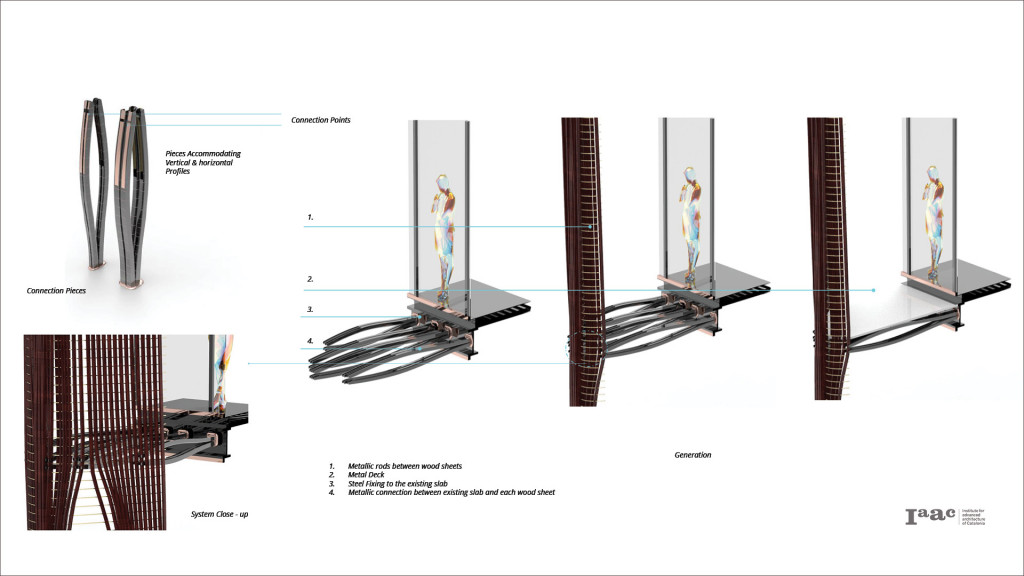
Proposed Facade System – Design Elements – System Close Ups
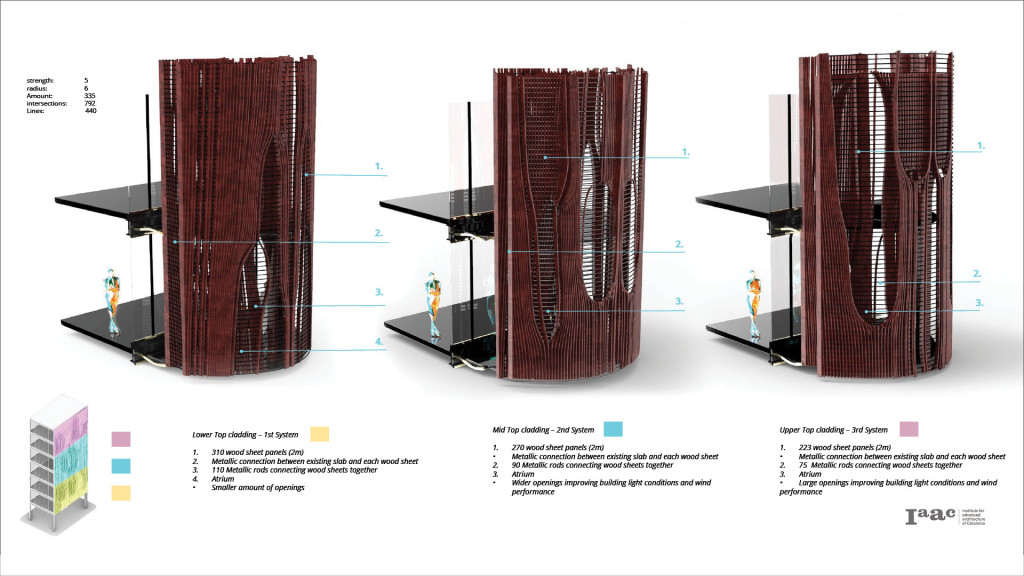
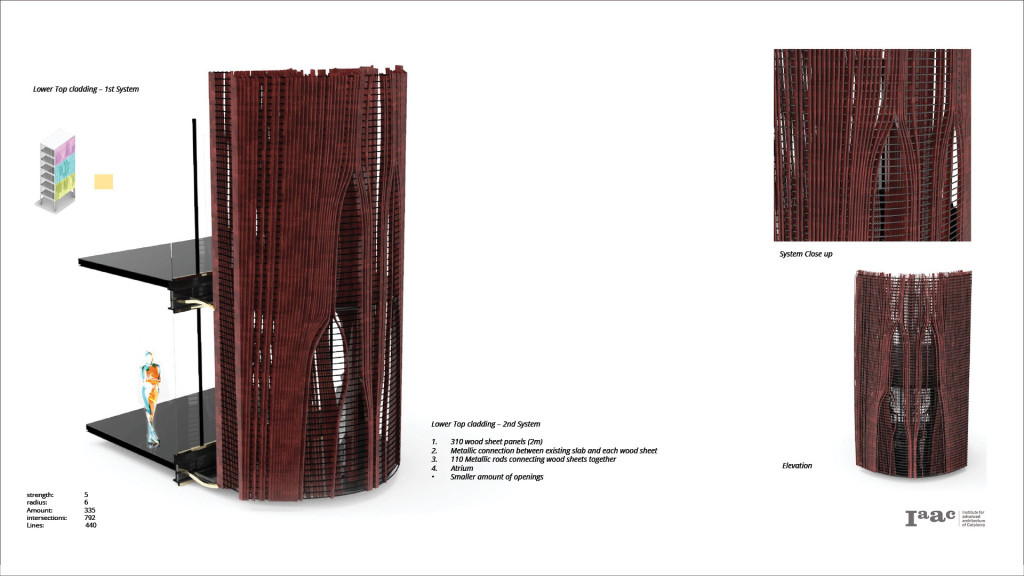
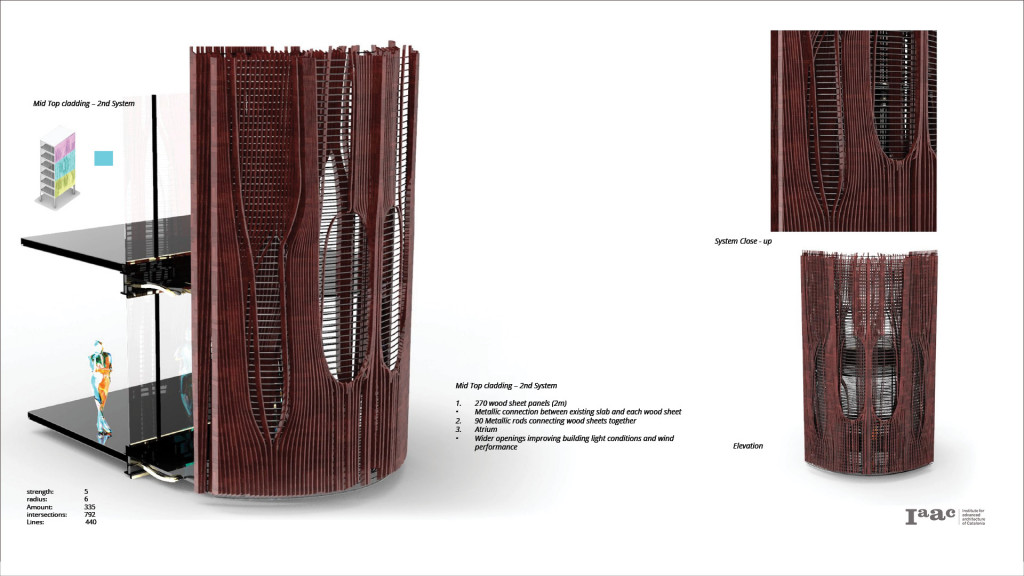


Connections – Slab to Wood sheet – Between Wood Pieces

Robotic Active Wood Bending is a project of IaaC, Institute for Advanced Architecture of Catalonia
developed at Master in Robotics and Advanced Construction in 2019 by:
Students: Alexandros Varvantakis, Cedric Droogmans and Roberto Vargas
Faculty: Alexandre Dubor, Raimund Krenmueller
