
Objective
The objective is to make robots communicate without a direct digital connection, by calculating the position of a fellow robot, the iiwa will in real time react to collaborate with the robot (or a human) reading its position, rotation, etc. and doing a given action accordingly.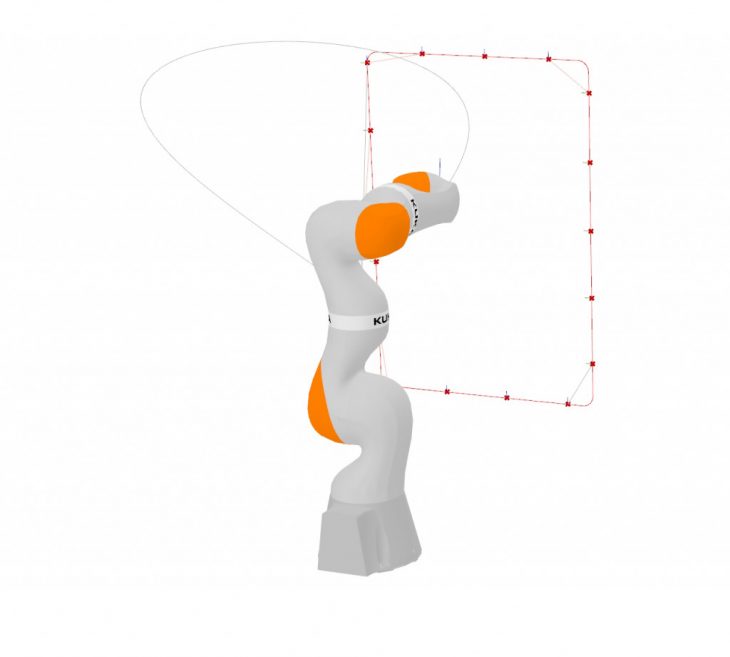
Steup
The setup is composed by a KUKA iiwa lbr 14, a handmade vertical plotter and a camera. Both the vertical plotter and the robotic arm are disconnected between each others. The vertical plotter is driven by a custom made interface while the KUKA is driven by the first fellow robot.
Framework
As previously said the two robots are connected with two different computers, so while the first one only has the purpose to move the vertical plotter using GCODE, the second computer has to read the coordinates acquired from the camera which are in pixel coordinates, remap them in world coordinates and feed them to the KUKA. In this way we achieve two robots co-operating between each others without the help of any cable or wireless connection.

Conclusion
We developed this project as a co-operative drawing system, and we could develop it so fast(5days) and focusing especially on the computer vision part only because of the great advantage that an iiwa lbr 14 gives to the user, the force feedback, that’s why we didn’t have to spend that much time on the tool calibration on the glass. Even though maybe a more standard connection between the two machines would have been faster and more solid, we intended this project as a little research to explore non standard communications among machines but also among machines and humans.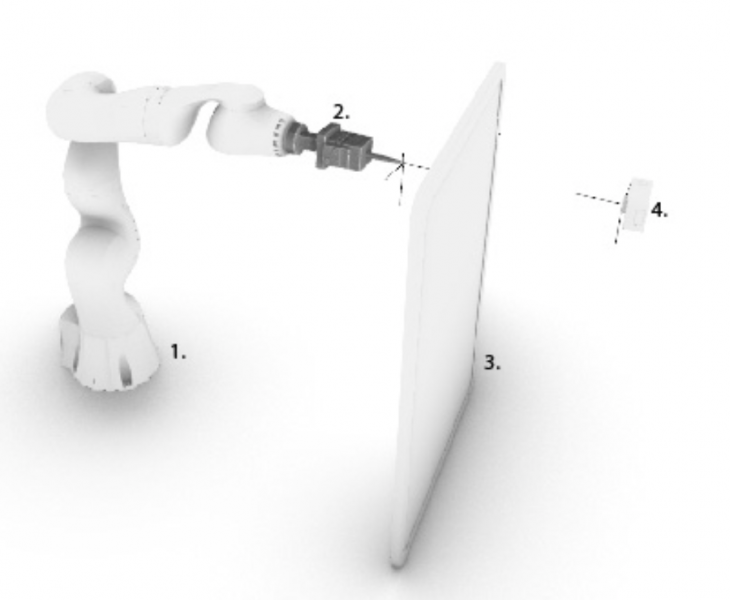
Video:
https://drive.google.com/open?id=1jtqBppWf8ENdged0vOVEPRA2PGr9ZsOo
Students: Stefano Meloni, Riccardo Mura, Luis Arturo Pacheco Alcalà
Faculty: Johannes Braumann
Tutor: Amir Bastan