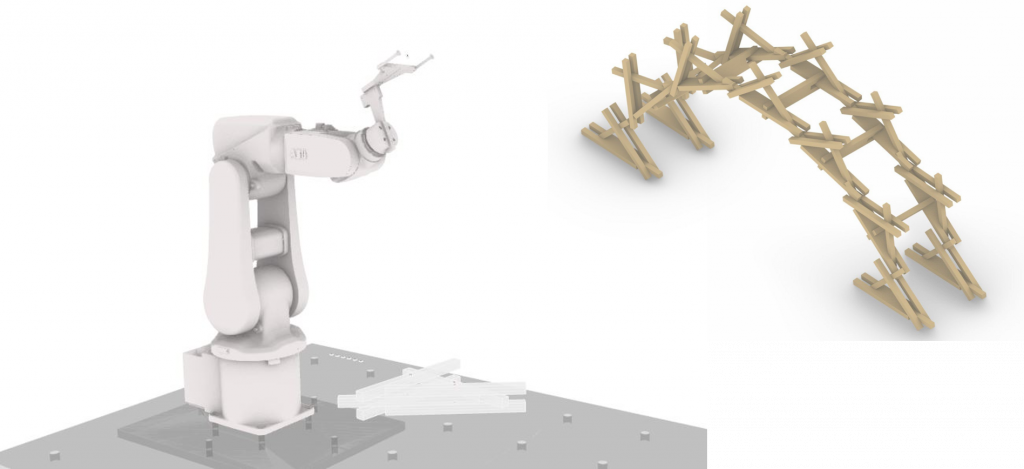
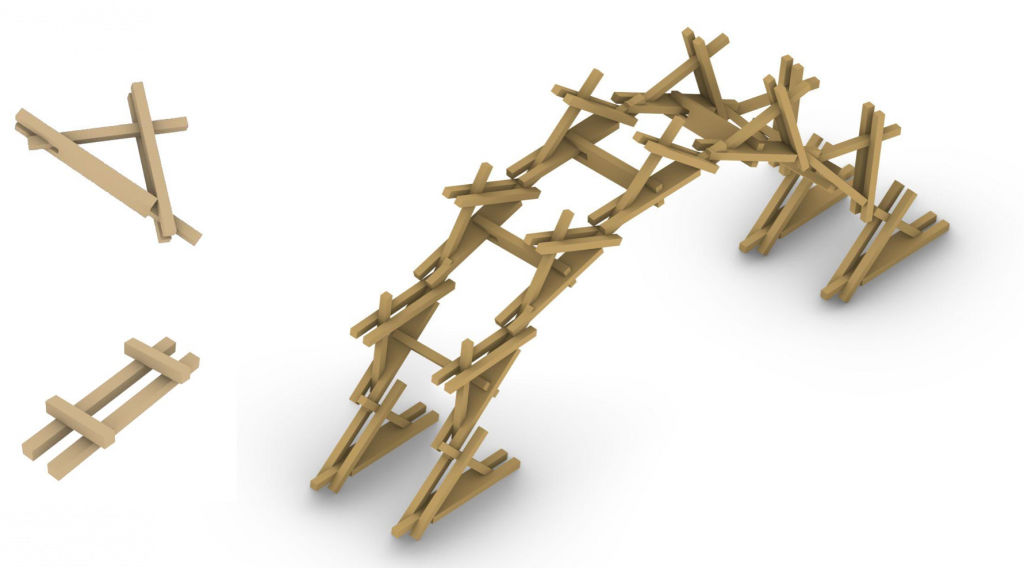
For this funicular arch design, we started from the realization of different types of modules, all of them generated from the pick and place technique. The final module with which we explore different geometries is made up of six sticks of 300 mm in length supported one on top of the other in a flat way and forming different angles for the configuration of the module. Regarding the search for the catenary structure, we explored various shapes, alternating form finding processes and physical analysis, starting from the geometry of different catenary arches and breaking them down according to their lengths and angles to thus reach the final catenary shape that we were able to manufacture based on our initial module.
Funicular Geometry – Module

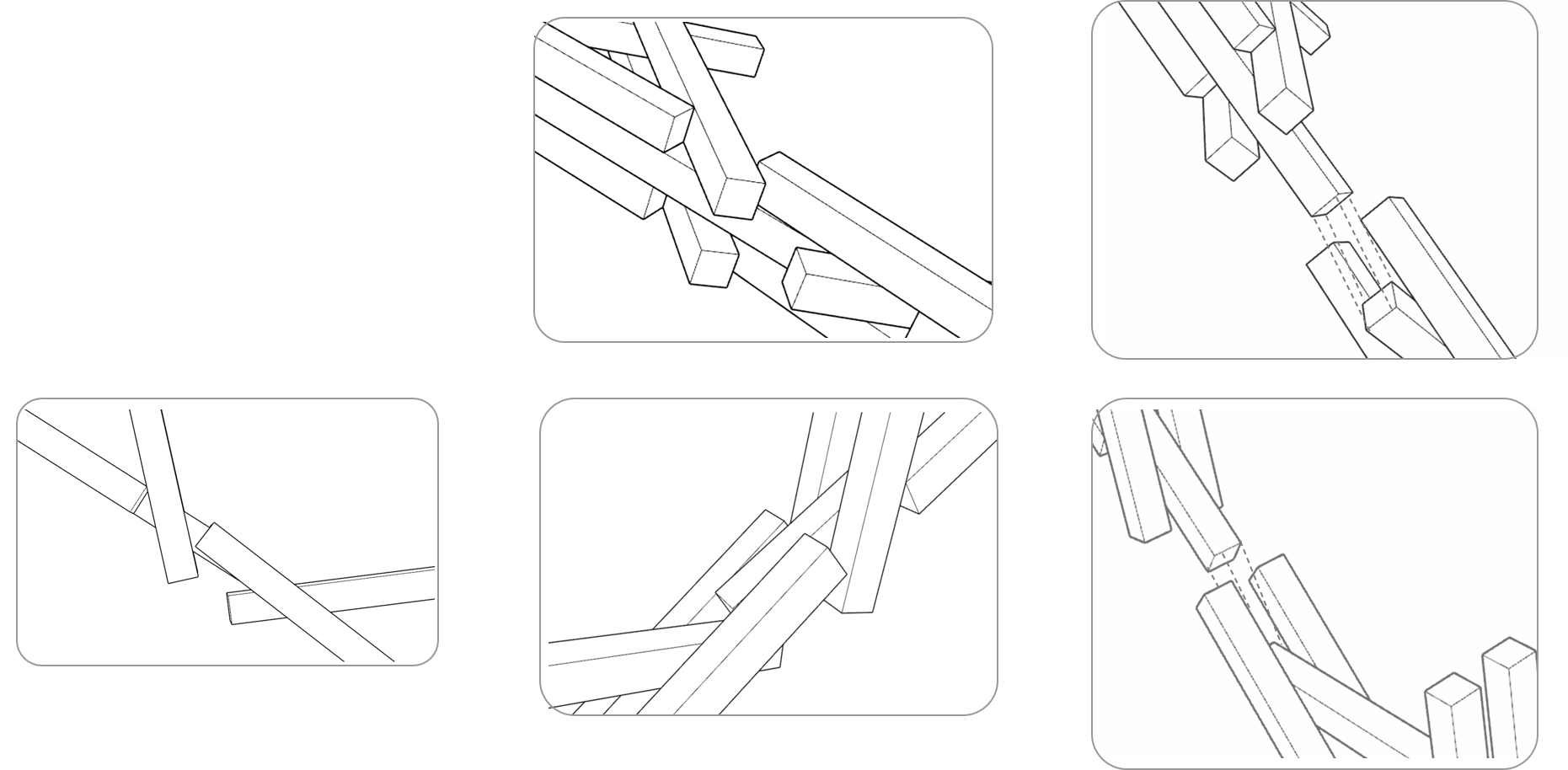
Joinery System Configuration
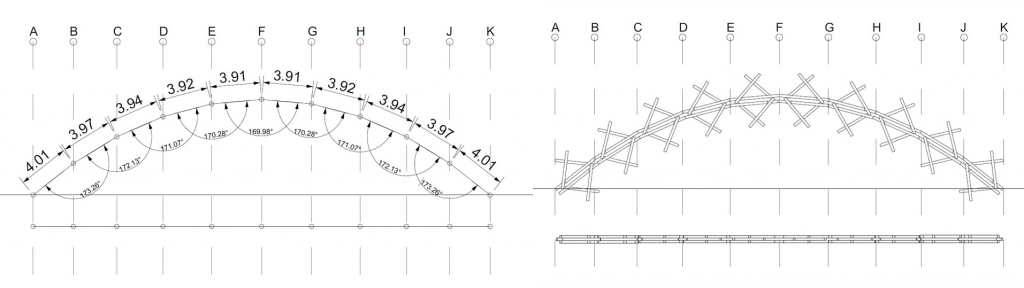
Technical drawings
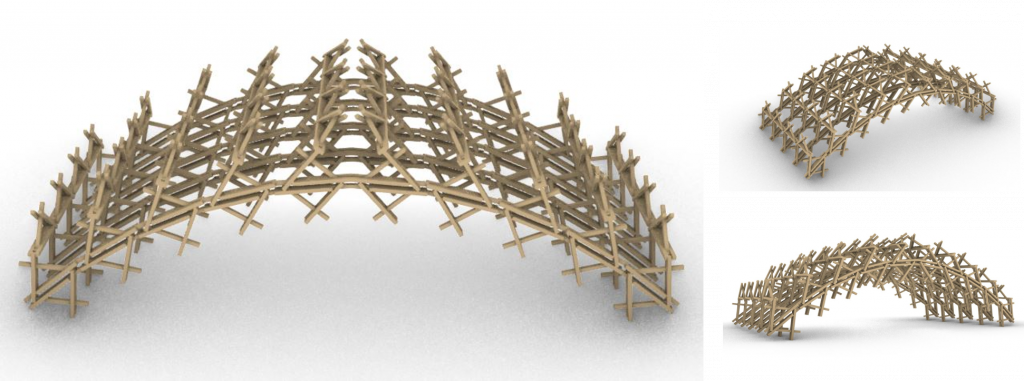
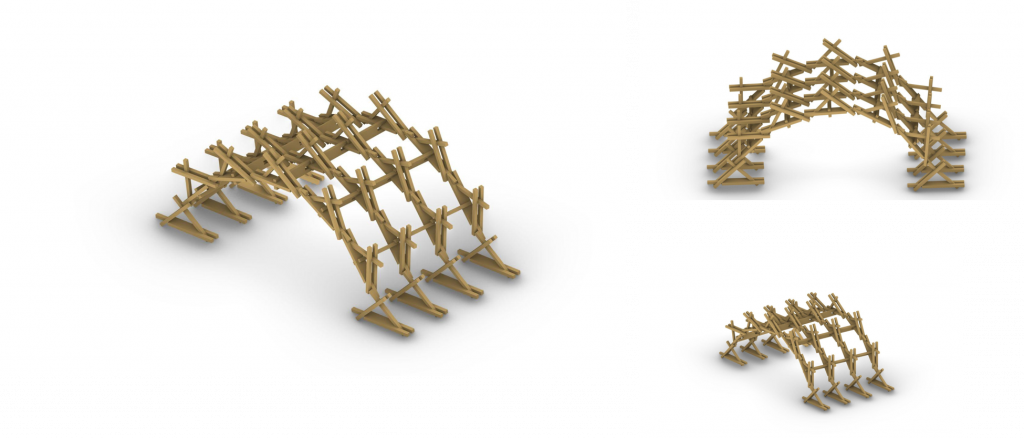
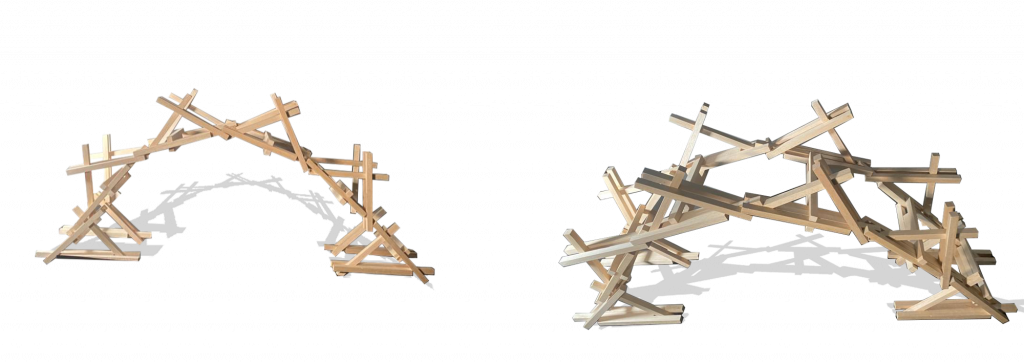
Funicular Geometry Possibilities- Option 1
Different views
Funicular Geometry Possibilities- Option 2
Different views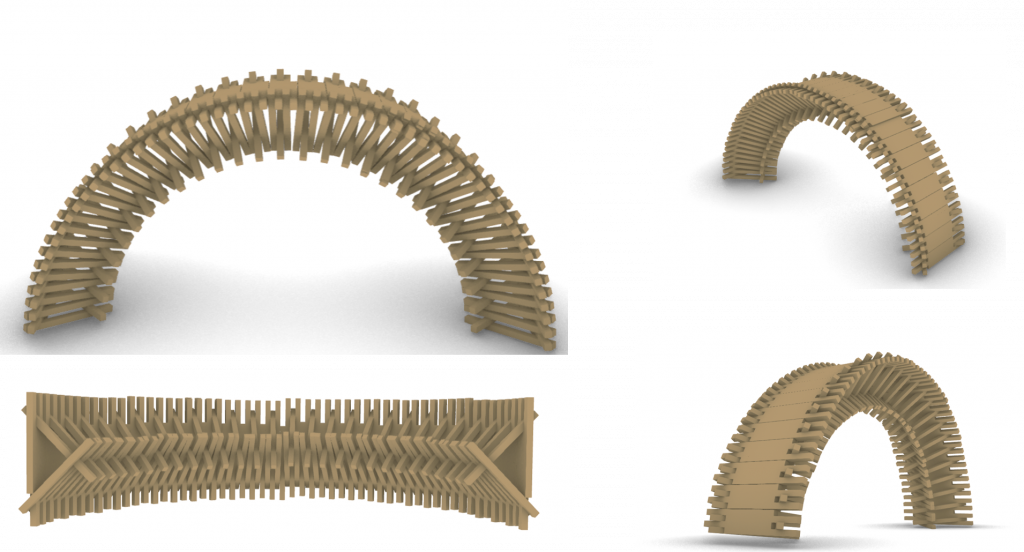
Funicular Geometry Possibilities – Option 1
Geometrical Configuration
Funicular Geometry Possibilities – Option 1
Structural Form Finding
Funicular Geometry Possibilities- Option 1
Funicular Geometry Possibilities- Option 1
Different views
Robotic Simulation – Module Pick and Place
Simulation and Analysis
Geometry and meshes
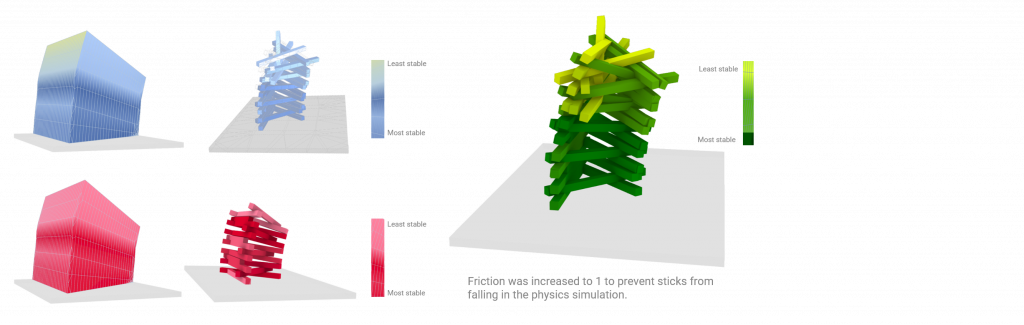
Physics Simulation
Results measurements matrix
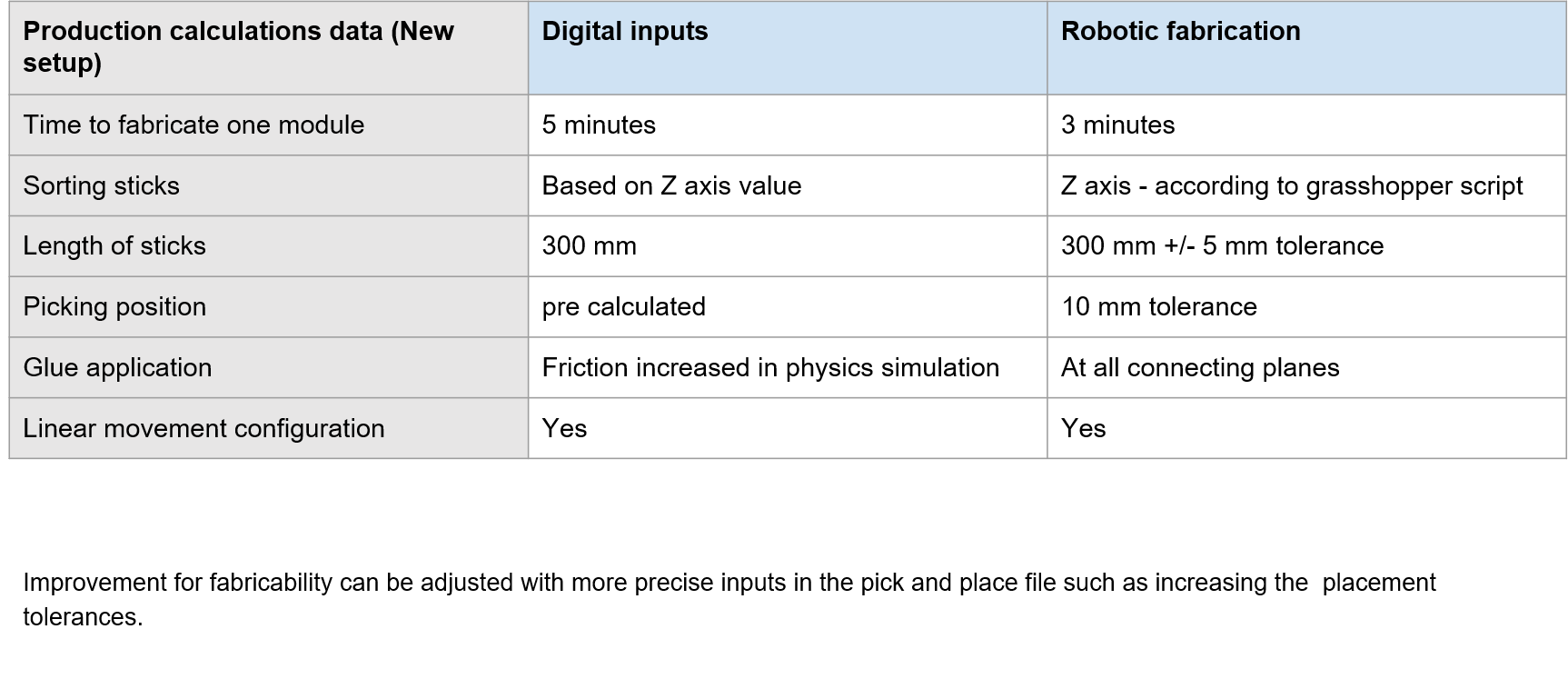
Digital Inputs vs Robotic fabrication
Fabrication Process
Using the robot
Photographic documentation- Final composition 1
Using the robot
Robotic fabrication of a Catenary Arch (Pick and place)
Is a project of IAAC, the Institute for Advanced Architecture of Catalonia, developed in the Master in Advanced Architecture (MAA01) 2021/22
Students: María Fernanda Rodríguez Orviz / José Manuel Asensio Torres, Meagan Sinead Enright, Aswin Kumar Ganesan.
Faculty: Ricardo Mayor Luque / Lana Awad Assistan Liang Mayuqi