Robotic Hybrid Manufacturing using Machine Learning
BACKGROUND
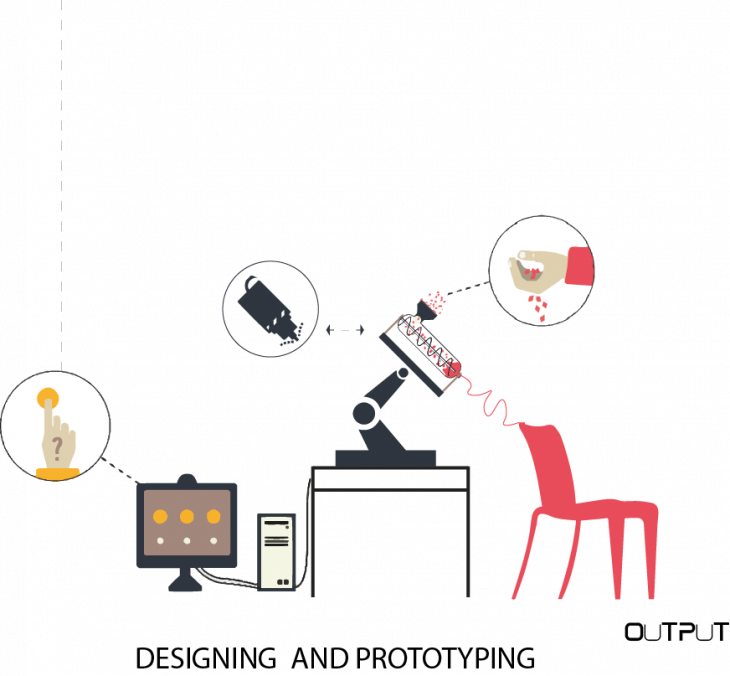
The project is based on our Studio dissertation, involving fabricating using 3D printing and milling using a Robot Arm. For the purposes of validating our method as a solution that can compete with standard processes in terms of time, quality and overall efficiency, the production of a chair would be a testable and comparable solution.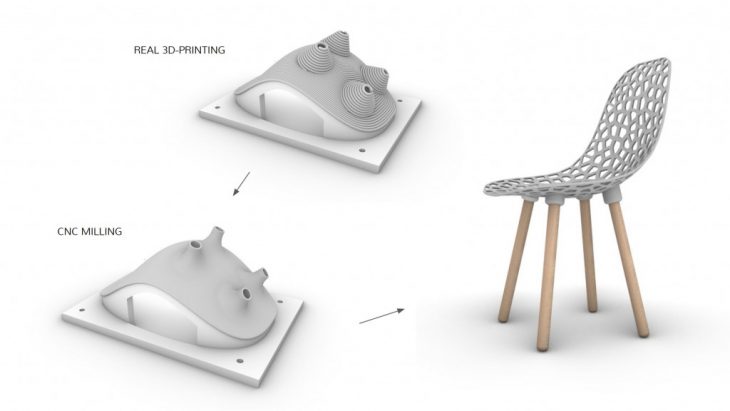
VISION
While tackling the dissertation solution in terms of manufacturing standards, they present problems specifically arising from the new technique. Design solutions to this new technique could factor in new elements such as lightness, strength, production speed and efficient print. The role of Machine Learning: Fuzzy Logic takes place in determining the optimum length of printing filament while adhering to the topologically optimized data ensuring the quickest print pass.
INPUT
The input for the geometry is the mold of the chair we will be printing on.

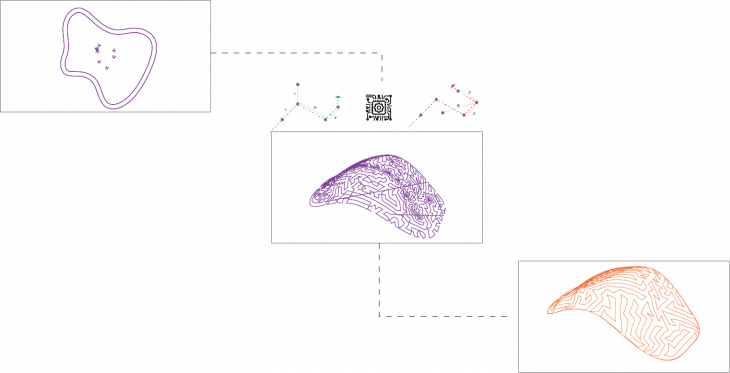
TOPOLOGY OPTIMISATION
Based on the forces acting on the surface, data on where topology optimization would be required can be derived. This gives in the initial data required to make the chair more efficient than existing chairs, leaving the possibility of mass customization.

CIRCLE PACKING
The translation of the topology optimization data into usable means is done by a circle packing logic reading the gradient values from topology optimization. The radius of the circle is determined from the gradient of topology optimization data and packed accordingly. Introducing this logic reduces the number of printed layers while keeping the stiffer layers in the required areas and flexible layers in the others in a transitional manner.

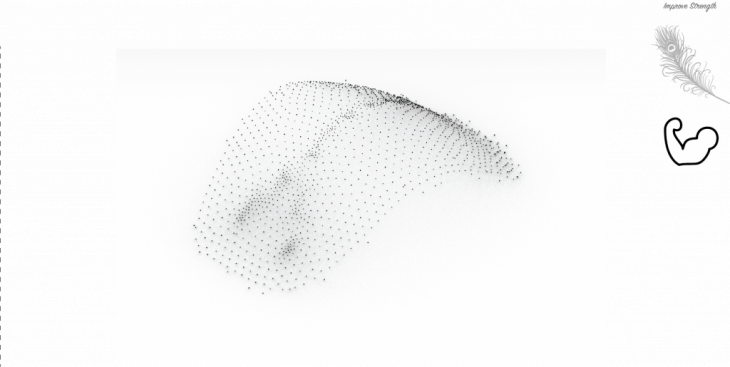
POINT CLUSTERING
Point clustering is another step for translating the topology data into points which would be useful in the steps following. the proximity of the points to one another can be related to their strength. Crisscrossing between points of different proximity can result in stronger bonds holding the chair together.
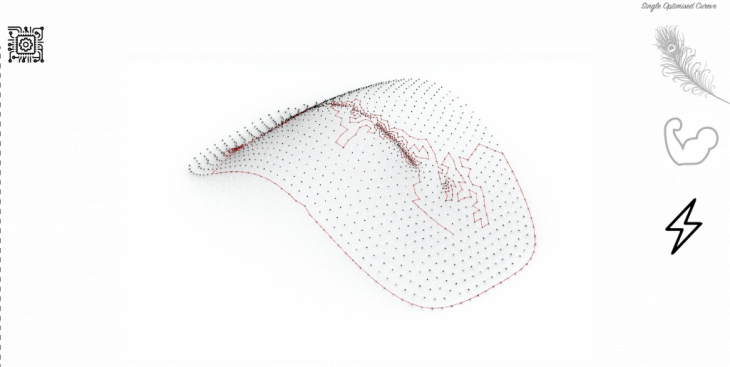
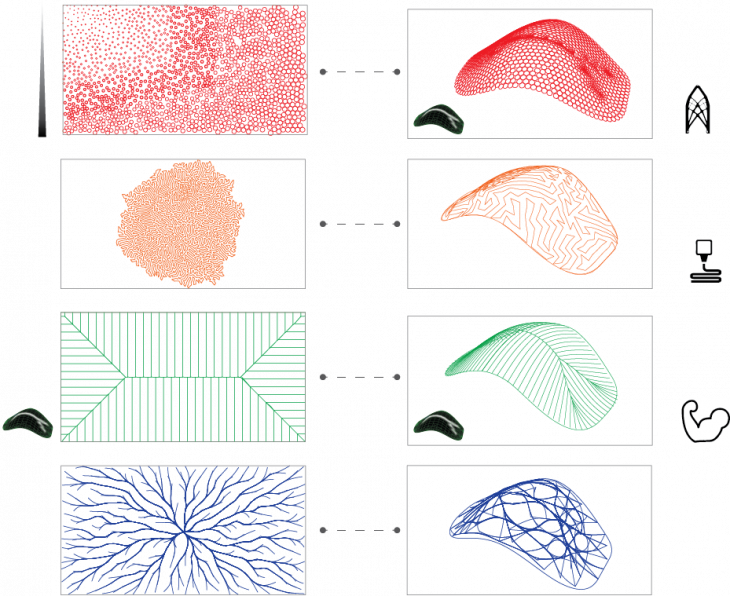
MACHINE LEARNING: FUZZY LOGIC
To connect the points and generate the most optimal moving pass a machine learning algorithm involving fuzzy logic senses the distance to the points surrounding it and moves crisscrossing between points of different proximities while avoiding immediate recursions i.e. in movement 1 it will move to x distance whilst in movement 2 it will move distance z or y or 2x. Furthermore, it avoids self-collision while running its iteration as this translated to actual printing will not be a feasible result.

The path correction and collision detection from the fuzzy logic invariably creates a crisscross running from dense to less dense and vice versa in a cluster of structurally oriented points to further the relation of flexibility with strength; nonetheless, ensuring the most efficient path length whilst doing so.
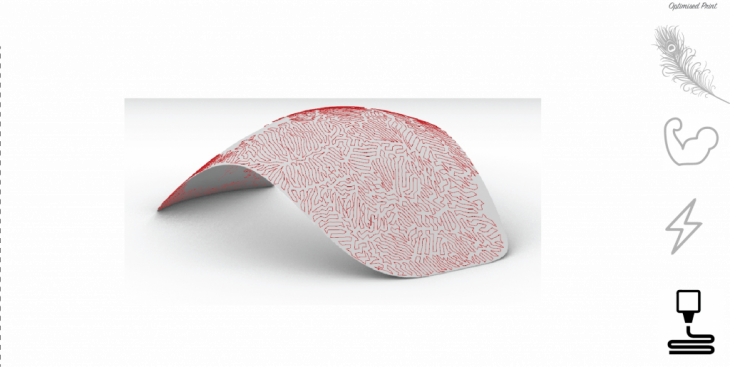
CURVE GROWTH
Despite having all the qualities of lightness, flexibility & strength, and the shortest & strongest pass. when translated to printed outcome the resulting curve will lead to areas of excess material while leaving holes in the others more widely placed. This is because of the width of extrusion always being constant from the mounted 3d printing tool. to ensure the printing width always intersects at half the printed width a curve growth is applied to ensure the best-printed pass while keeping all the data from the steps so far in the process.
OUTPUT
The file after running through these processes is ready to be printed on the robotic arm.
CHALLENGES
One of the challenges faced during the fuzzy logic is while achieving the crisscross weaving of the path, it failed to detect boundaries and overlapped. The code must be looked into deeper to solve this issue.
CONCLUSIONS
In our exploration with machine learning, while adhering to our studio dissertation, this method of implementing a design solution is one of many we explored. Though not imbibing machine learning in the design process for the other iterations, it could be explored in the production process. Listed below are the other iteration not involving machine learning:
Robotic Hybrid Manufacturing using Machine Learning is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction (M.R.A.C.) in 2019 by,
Students: Sebastian Voigt | Apoorv Vaish | Subhash Prajapat | Owaze Ansari.
Faculty: Mateusz Zwierzycki, Starsk Jose Lara