Context:
The workshops concerned the connection between robots in real time, augmented reality for assembly, reinforcement of structures and self-organizing structures based on agents.

Teams:
Due to the complexity of the process, the group was divided into 4 teams.
- DESIGN
- REINFORCEMENT
- PRODUCTION
- REAL FEEDBACK INFORMATION
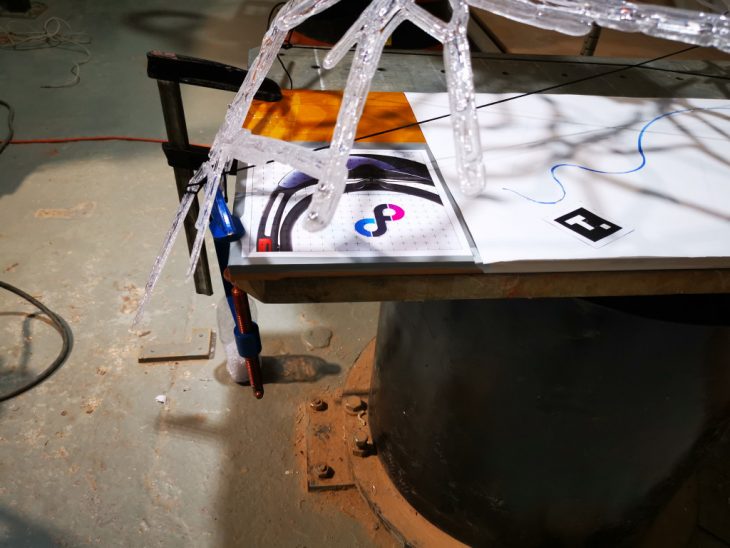
The project team was tasked with untangling and printing the body’s body structure elements on a flat surface, which was then marked with Aruco markers and assembled by the production team. The task of the Reinforcement team was to print along the surface of the composite body to reinforce the key stress points along the structure. The feedback team was to develop a reinforcement printing system on the model with a sensor that would scan the surface and update the position of the print nozzle with real-time feedback.
video by Sebastian Voigt
Team Production:
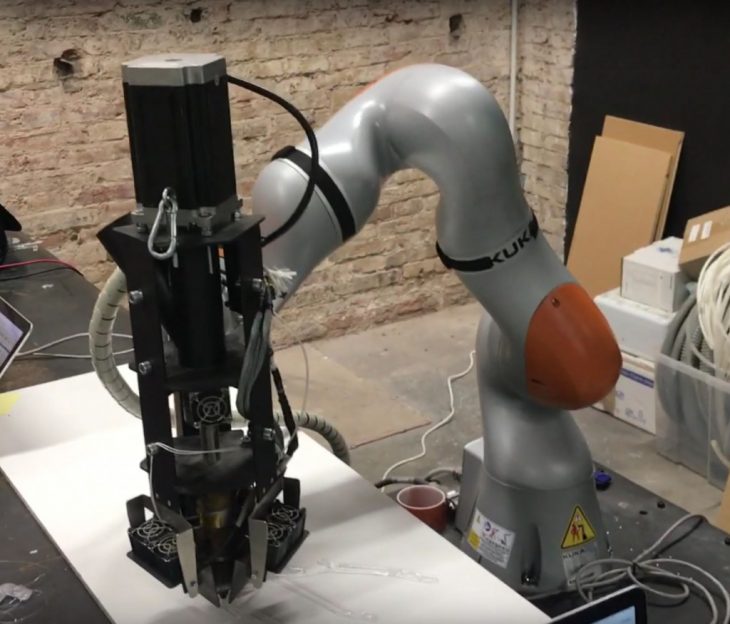
The key tasks for the production team consisted of printing all generated elements of the structure. First, try with KUKA iiwa, unfortunately, didn’t work due to technical reasons. Then collaborative robot was left for the reinforcement team and production moved on the other big KUKA robot. This allowed us to focus on important tasks.
The main challenge was to find the right values for printing using extruder build by WASP to PETG, such as material flow rate, extrusion temperature, and printing speed. Transparent PETGelements should have the best visual properties, constant width, and height of the layer and acceptable production time.

Conclusion:
The direct communication between a computer and robotic movement is a good improvement for faster and more efficient production and an important tool in the sense of path correction. In the case of 3D-printing, the right tool and the right material according to the needs of the project are mandatory. Sensor feedback could also be a big advantage to detect and correct over or under-extrusion or other possible problems occur in 3D-printing. Also, reinforcement with real-time feedback could improve the whole process. One of the considered ways to print on already assembled structure was “teaching mode” in KUKA iiwa. This would be very intuitive in the same time providing constant speed and control

Workshop 3A | MRAC 2018-2019
Faculty: Roland Snooks
Faculty assistants: Natalie Alima | Kunaljit Chadha
