IAAC – Master in Robotics and Advanced Construction
Software I
Faculty: Alessio Erioli
Faculty Assistant: Eugenio Bettucchi
SOFTWARE I SEMINAR
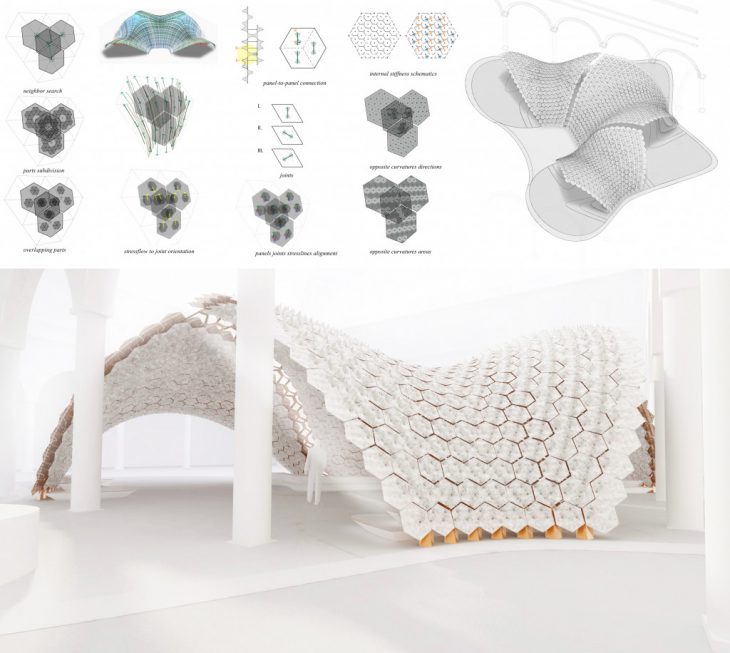
Credits: Synthetic Redundancy – Giovanni Checchia Master Thesis – advisor Alessio Erioli
This course aims to provide an understanding of computational design as both paradigm and attitude in architecture, focusing on its inextricable relationship with construction: a matter of geometry and forces within an inherently behavioral process. Constructions are thus seen as coherent organizations able to process information, whether physical in nature (structural stress, heat, light, etc.) or of any other kind (semantic, aesthetic, etc.), exogenous (from data fields external to the system) or endogenous.
The core concepts of constructability, tectonics, algorithms, and machines will be discussed and incorporated into the design process as primary drivers, fostering a design approach that mobilizes technologies as design opportunities. Central to this approach are the aspects of geometry/process coherence and how encoding behaviors (as sets of intentional decisions) and details (as geometry) at the granular level affects the global outcome in non-linear ways. Charting these intentions/constraints/outcome relationships requires building iterative simulations to experience the unfolding of the process over time.
Credits: Dual Shells – Francesco De Fabritiis
Intentionality is thus played out through the encoded constructive capacities and constraints; the embedded coherence of the spatially articulated end result provides a readable, multilayered and complex structure of information.
Learning objectives
At course completion the student will learn:
– understand the concept of computation and its difference with computerization in the design process
– understand the basics of non-linear and iterative processes
– understand constructability as geometric and processual coherence, recognizing the flow of information that each part-to-part joint enables and its consequences on the regional and global levels of the system
– be able to mobilize productively iterative strategies for the design of a project
– be able to encode constraints for numerically controlled tools for fabrication