SOFT ROBOTIC GRIPPER // HARDWARE I SEMINAR
The Soft Robotic Gripper is a project developed during the Hardware I Seminar of the MRAC-20/21-program. The objective of the seminar is to give an overview of the state of the art in robotic actuation, discuss the practical implementation of such actuators, and brainstorm how these actuators and the robotic arms could bring new levels of versatility, agility, and efficiency to the production and construction processes. We created our own sophisticated soft-robotic actuator for a robotic arm. The goal was not just to create the gripper itself, rather to build a unified system including a pneumatic syringe pump. This makes the gripper versatile for different scenarios, including mobile solutions for on-site applications.
Initial Idea
The initial idea was to explore the state of the art in the area of soft robotics.
Soft robotics include inflatable parts and either uses these to move forward or be able to grip delicate or fragile items.
Project Description
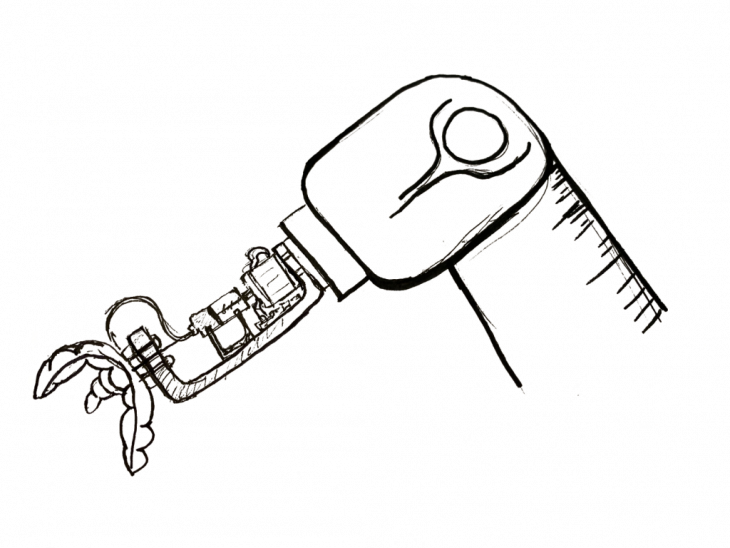
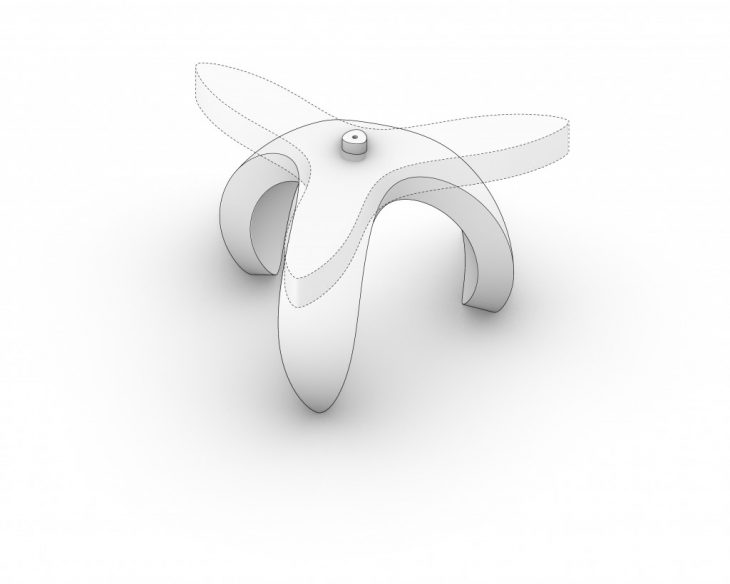
The goal is to cast a robotic gripper out of soft silicone which retracts to a closed position to grab a defined object.
As the goal of the seminar is to achieve a sophisticated hardware actuator for a robotic arm, the goal was not just to create the gripper itself, rather build a unified system including a pneumatic syringe pump.
Casting Process
The negative mold for the gripper was 3D-printed before casting the gripper with a 2-component industrial silicone.

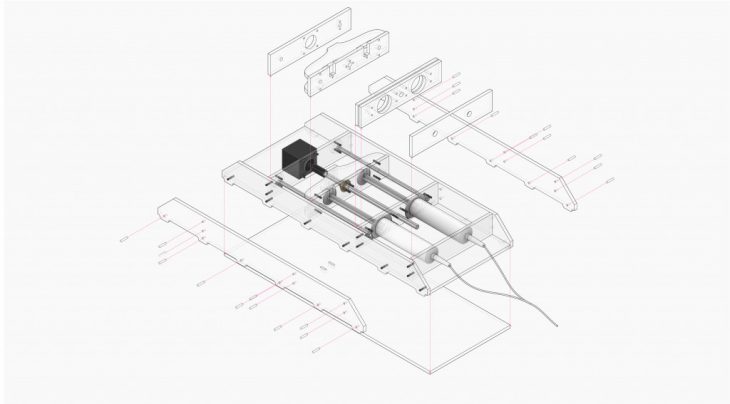
Hardware and Code
The syringe pump is actuated by a stepper motor pushing two off-the-shelf syringes forward.
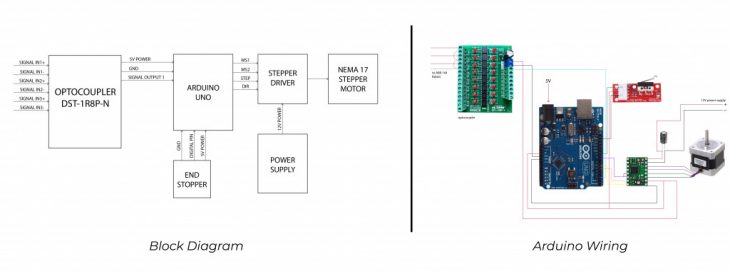
The system’s first step is to home itself with an integrated end-stop-sensor.
After homing, the arduino is waiting for the digital output of the robot to start pushing the syringes – inflate the gripper.

Application
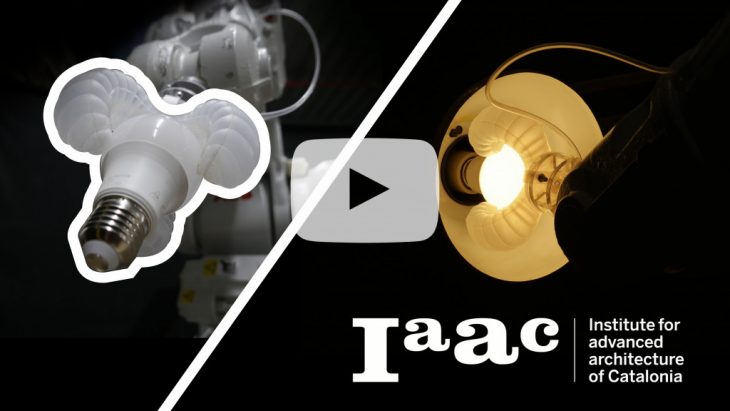
The scenario to test the abilities of the soft robotic gripper is to pick up a light bulb, place it horizontally into a desk lamp and screw the bulb all the way in.
The toolpath was created in Grasshopper including all necessary digital outputs to actuate the syringe pump.
Documentation
Here you can watch the final presentation video:
Here you can watch an early work-in-progress video:

Project Files
Click HERE to view the project’s Github-page:
Download the Arduino Code HERE.
SOFT ROBOTIC GRIPPER is a project of IaaC, Institute for Advanced Architecture of Catalonia developed at the Master of Robotics and Advanced Construction program in 2020/21 by:
Students: Hendrik Benz, Michael DiCarlo, Aslinur Taskin
Faculty: Angel Munoz
Faculty Assistant: Matt Gordon
