SYNTHETIC MOSAICS
Gamifying Design and Construction
We began this project by picking up from a previous workshop in which a closed loop system of machine vision, recursive growth modeling, and a robotic pick and place process were implemented to produce new mosaics from irregular shattered tiles.
WORKSHOP 2.1 REFERENCE
Here we have a sample product from our WS 2.1 reference.
GAMEPLAY LOGIC
First, we opted for a regular underlying hex grid structure on which to impose our “mosaics” rather that growing totally organically, this gives us more control and predictability in the outcome.
SCALE IS RELATIVE IN VR
The system we’ve constructed has several layers of play involved. First there is the Virtual environment, designed as a space floating over moving fog in a expansive fantasy world, this is somewhat arbitrary as far as system mechanics but serves to dissociate the player from their surrounds. In this world the player in tasked with traversing the game field to various goal points
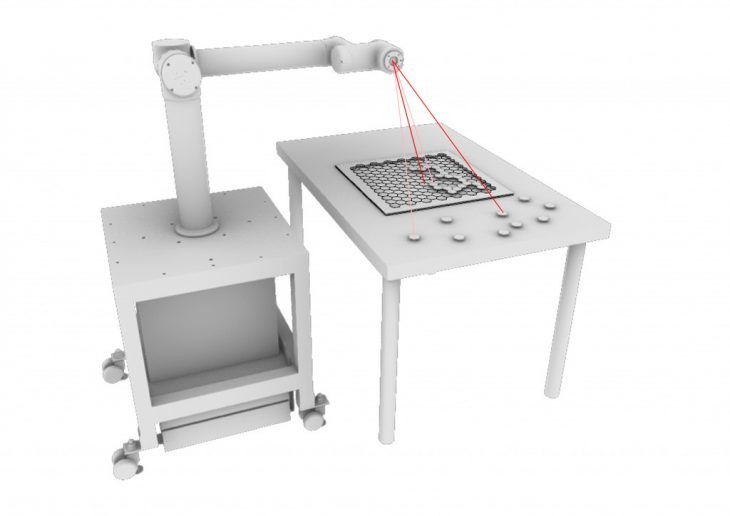
SIMULTANIOUS ROBOTIC ASSEMBLY
The field is made up of floating hexagonal cells which are invisible until activated, when activated a giant robotic arm moves to virtually place the next cell on your path. The action time, path and positioning of the virtual robot reflect in real time what a physical robot is doing in another location on a much smaller scale. As the player moves through the game, the “real” robot is tracing their path by laying the game pieces on a board which is a facsimile of the virtual game space. The artifact created is a small mosaic of hexagonal tiles.
FIRST PERSON VIEW