Project : Terrain Erosion
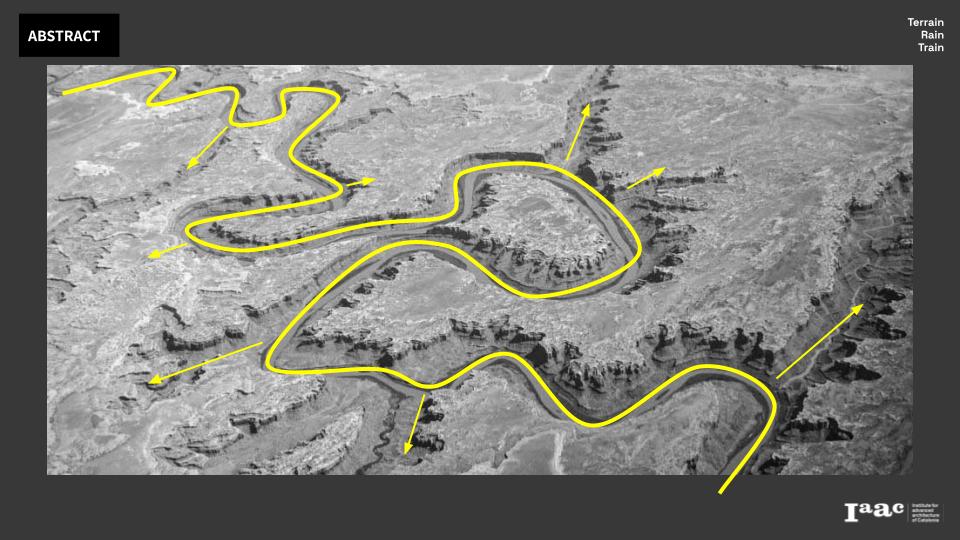
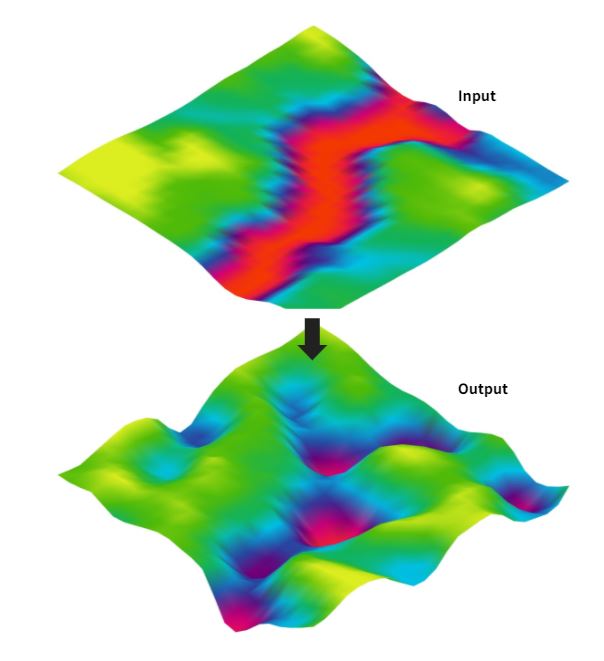
On the riverside area, the flow of the river creates hydraulic action which causes riverbed and land erosion. In order to prevent and predict the loss area, the simulation will take time and requires expertise knowledge to do. In consideration, this proposed project aims for compacting the erosion mathematical calculation to the design field to create tools that can predict the possibility of eroded forms in less time consumption. That machine learning will help us encode the simulation process and decode to the output. The Machine Learning tool that was used in this project is the Autoencoder that encodes the bottleneck representative and translates to the predicted. By inputting a heightmap of 25×25 or 625 values for each input, the model could generate back a new 25×25 or 625 output of erosion values. The result of this machine learning shows the different results when it was run with the same dataset but with a different strategy.
This research project of using form dataset integrated to machine learning explains the bias of the model based on its environment and features. In order to develop this tool in the future, the evaluation needs to be validated by the experts and collaborate with more environmental factors that were excluded in this project.
CONCEPT
The project is aimed to train the machine for predicting the eroded form by river flow calculation results and geographical transformation of the surfaces. The current software in the market requires some skills and time for simulation that we have collecting those data both from input and output for training. The goal is of this project is to provide users with more friendly tools to predict landscape erosion form that could happen in future.
PSEUDOCODE
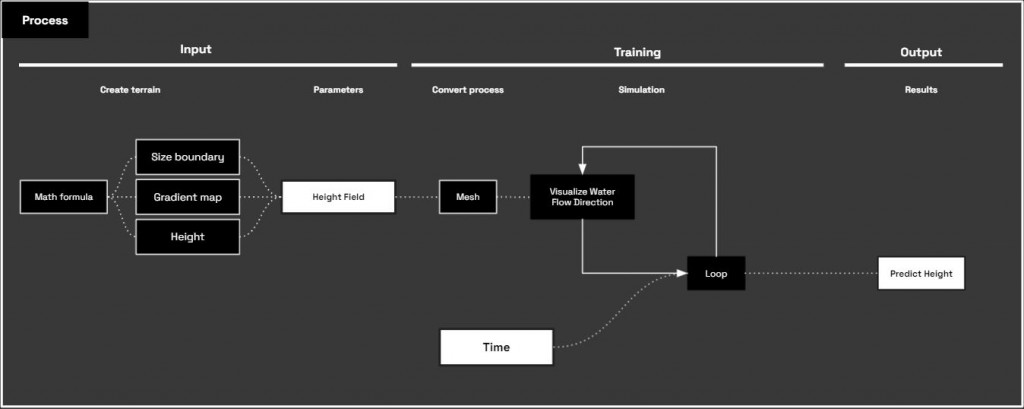
Considering about Time, we propose a machine that could function as a loop for each iteration of erosion.
DATASET PREPARING
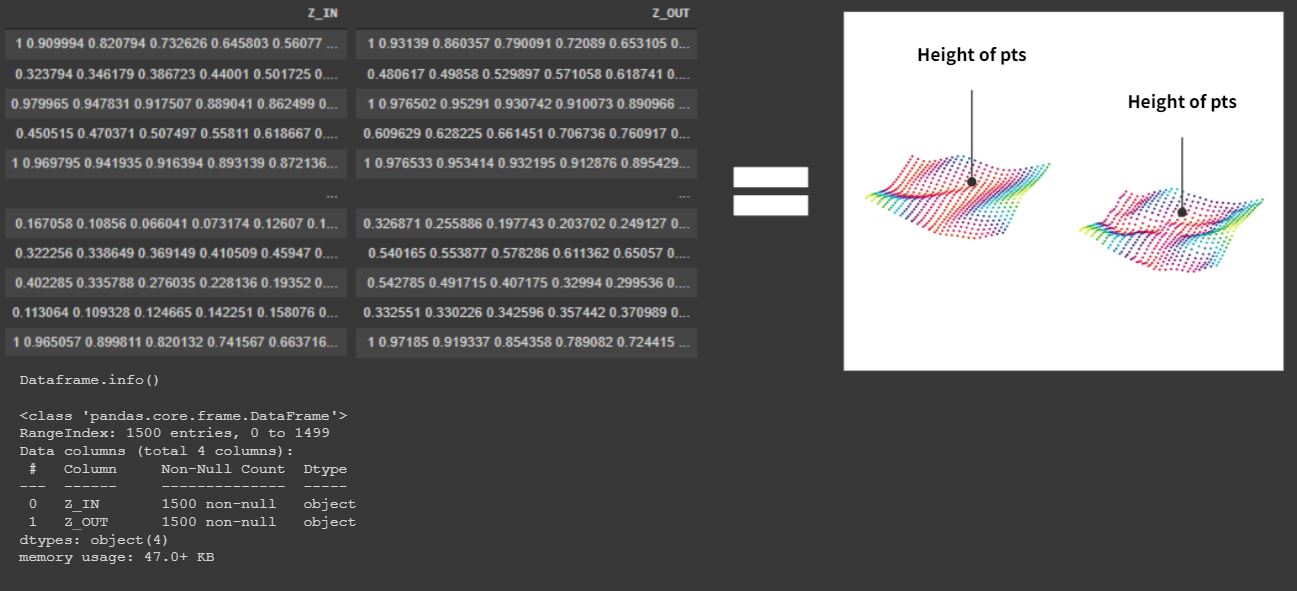
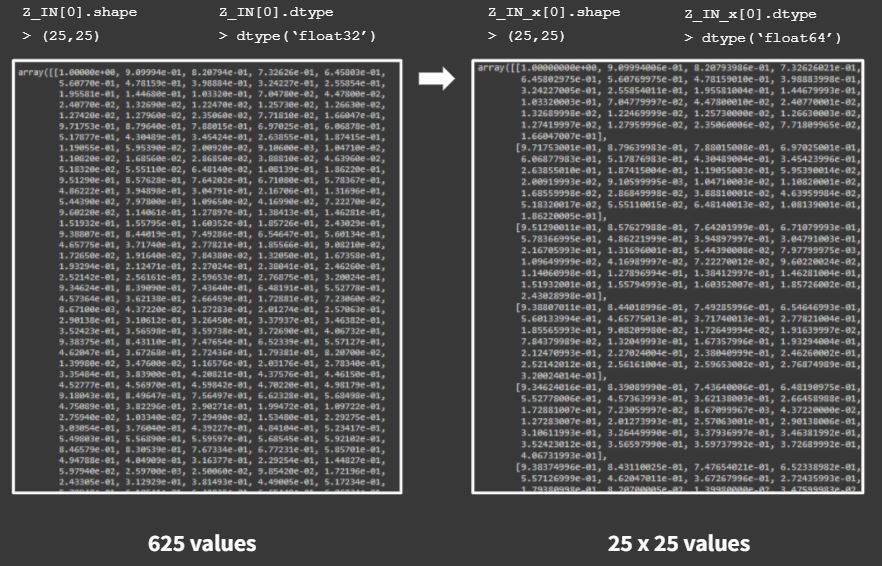
The dataset was collected from Z-in and Z-out based on the simulation. That we create 25×25 or 625 square grid for our training set.
The value was remapped into 0 to 1 that could be used further in standard scaling.
TRAIN / TEST DATASET
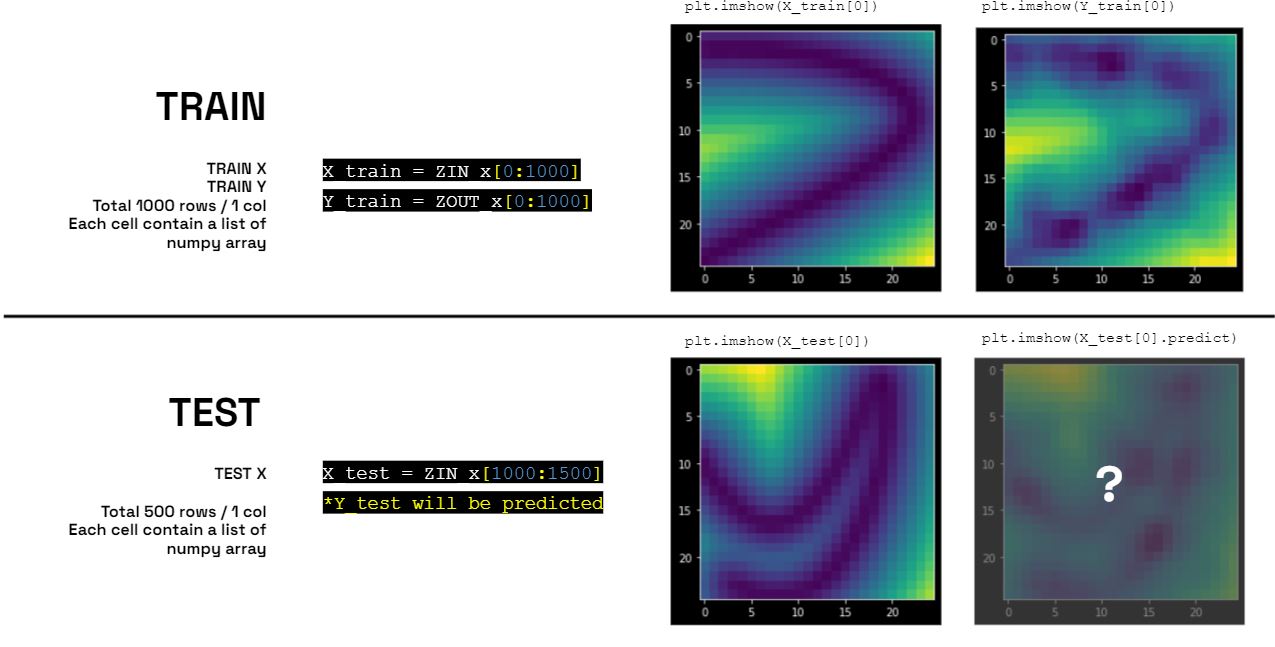
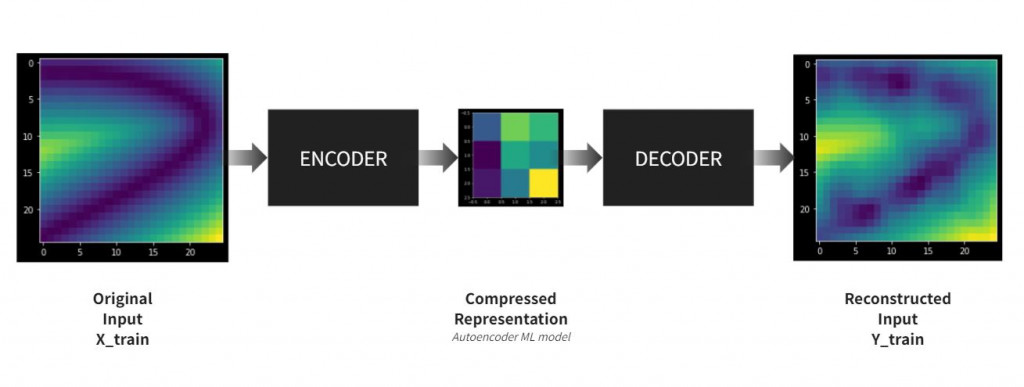
Autoencoder is a model for prediction, that the input will be an original surface map and output benchmark will be the results.
The model will learn how to encode and decode from the bottle neck as a compressed representation of smaller pixels.
MODEL ARCHITECTURE FOR AUTOENCODER
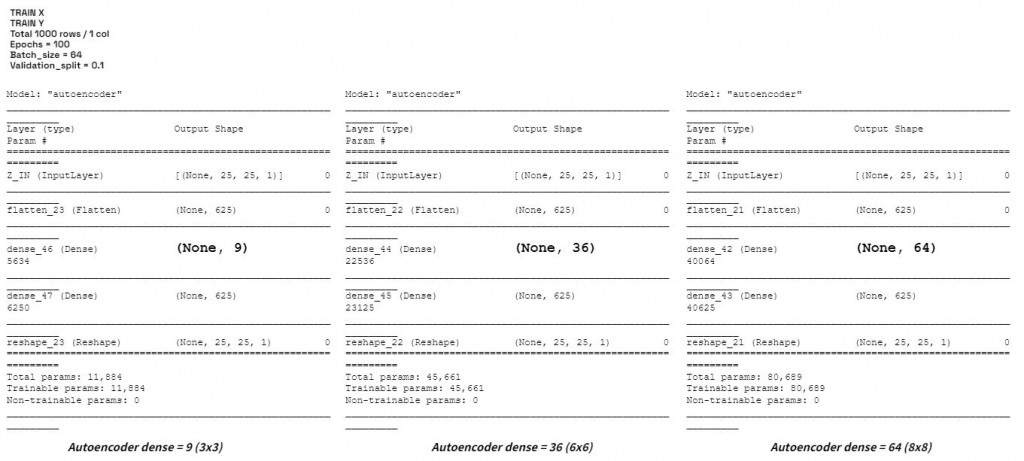
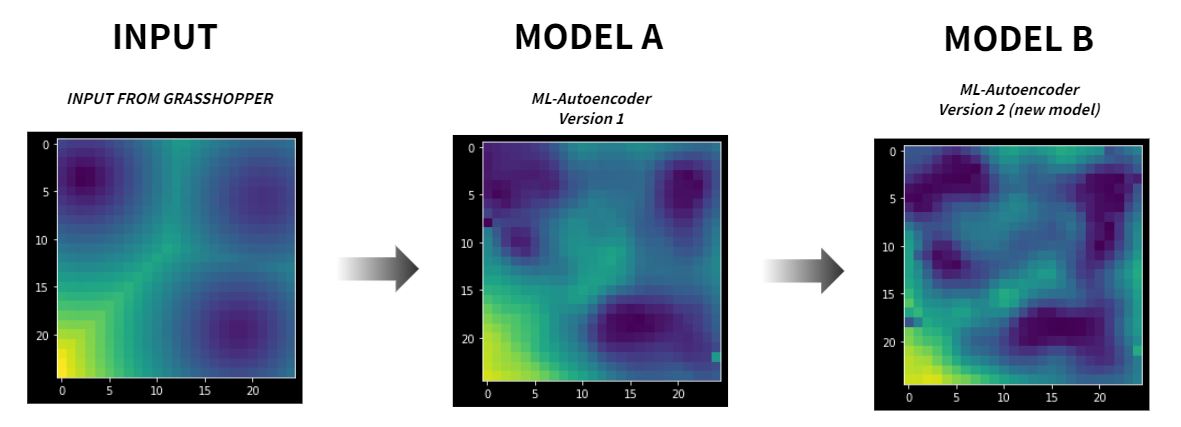
The models were tested in 3 different density including 3×3, 6×6, and 8×8 to analyze the results for optimal model.
COMPARISON
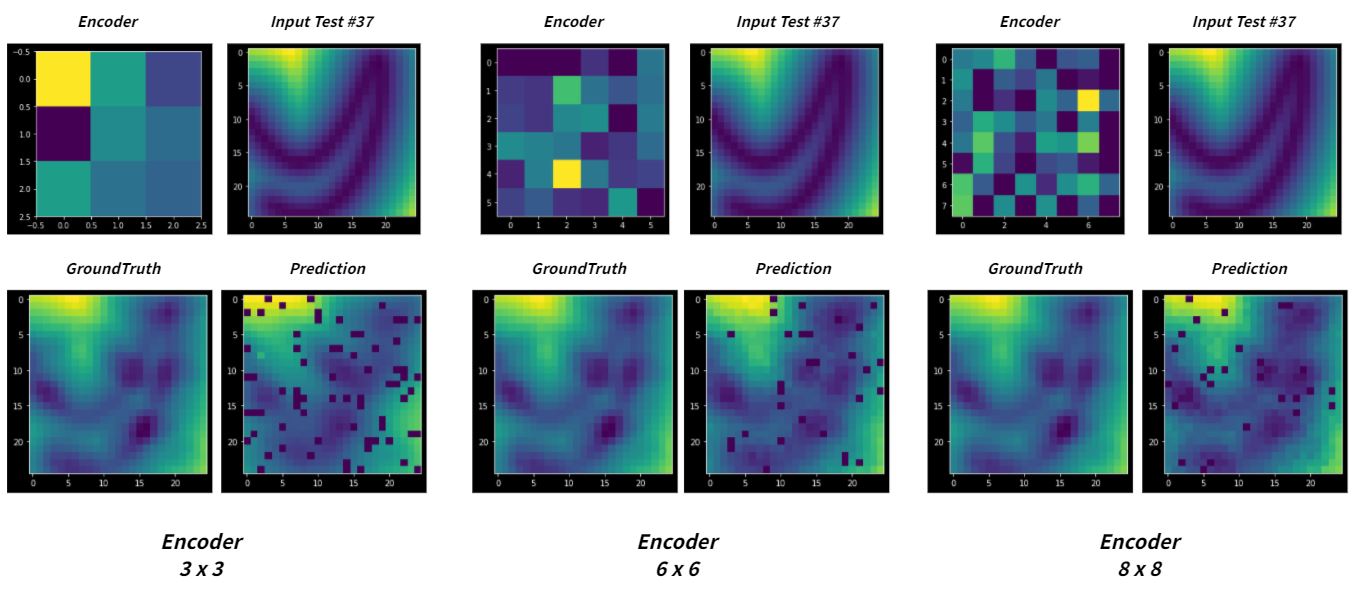
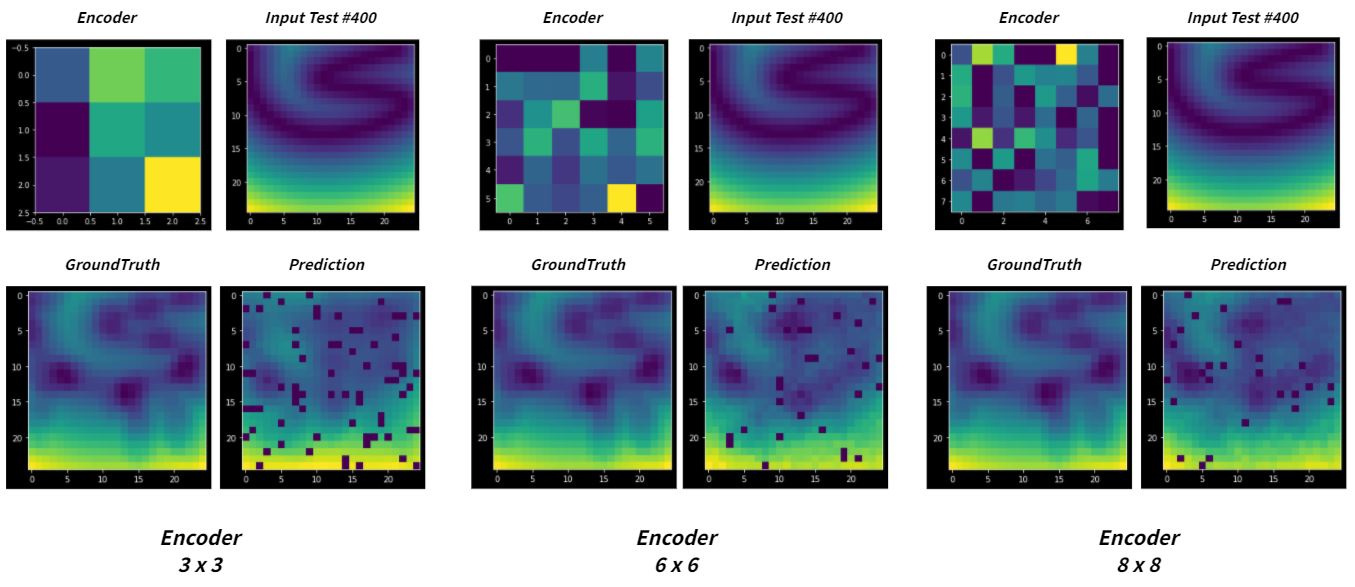
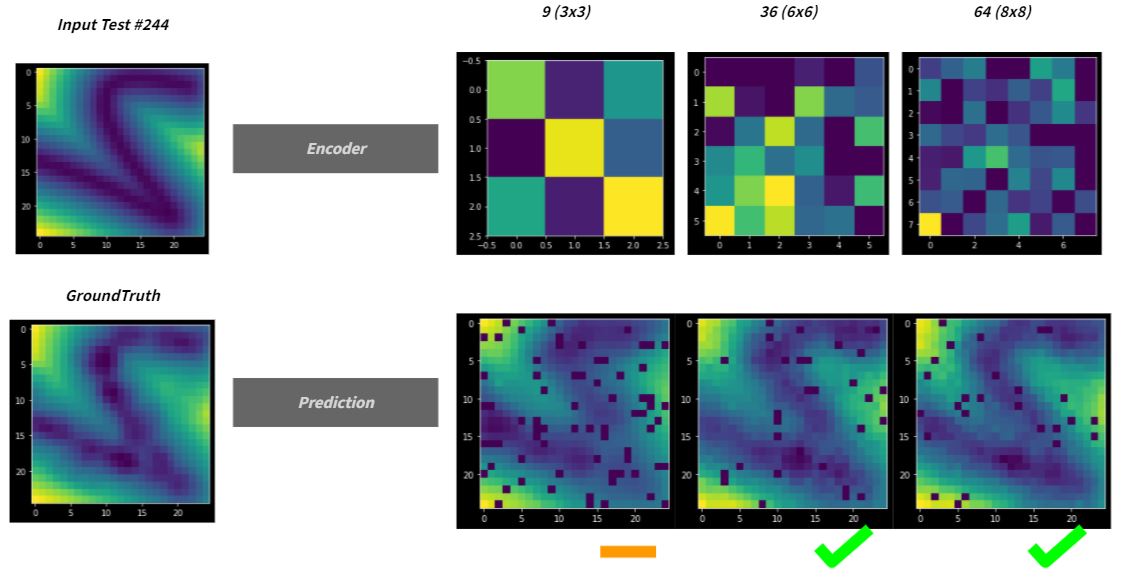
The selected model is 36 or 6×6. However, the predicted results show the unexpected noises due to the decoder.
DENOISER
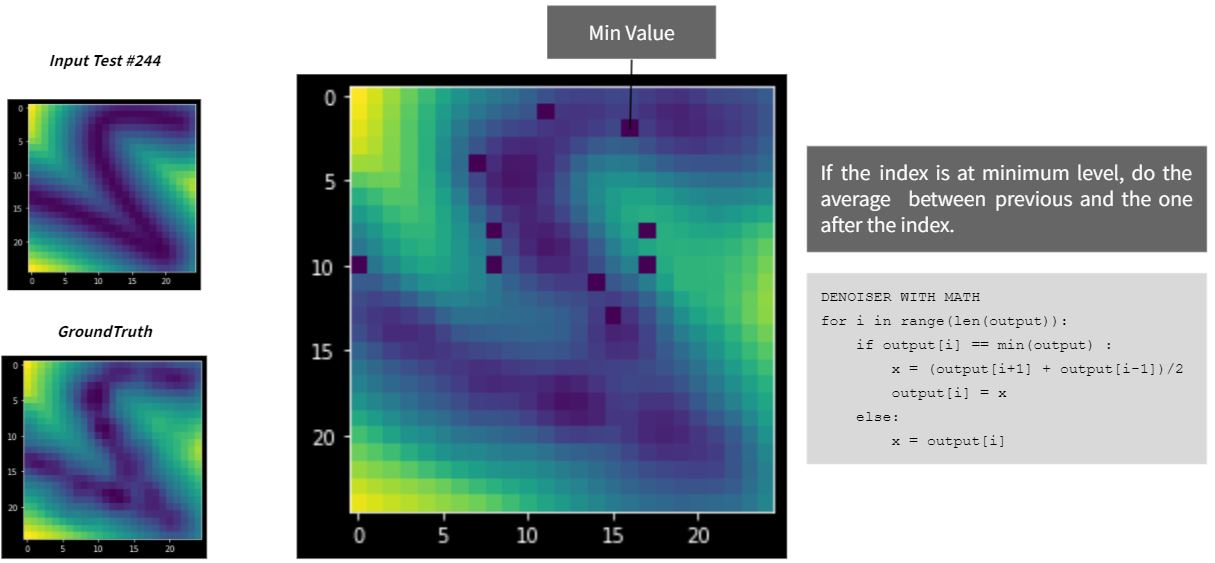
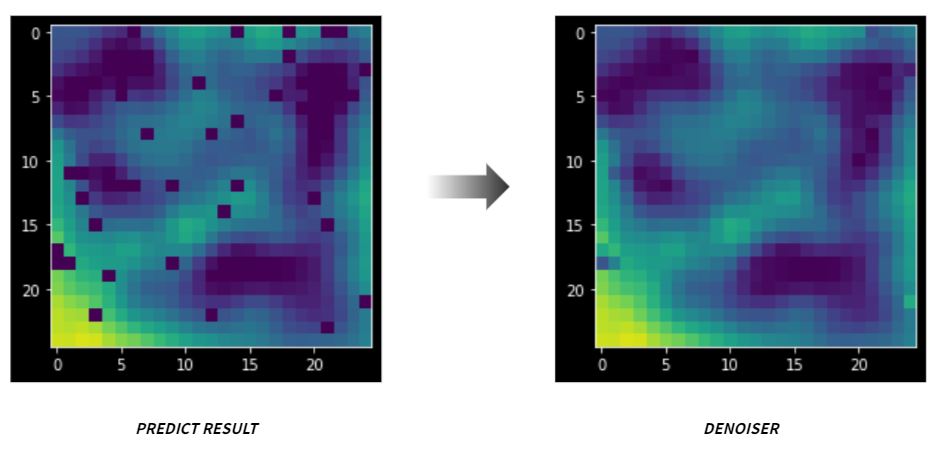
That the denoiser could be done simply by replacing the dark spot with the average from the neighbor pixels.
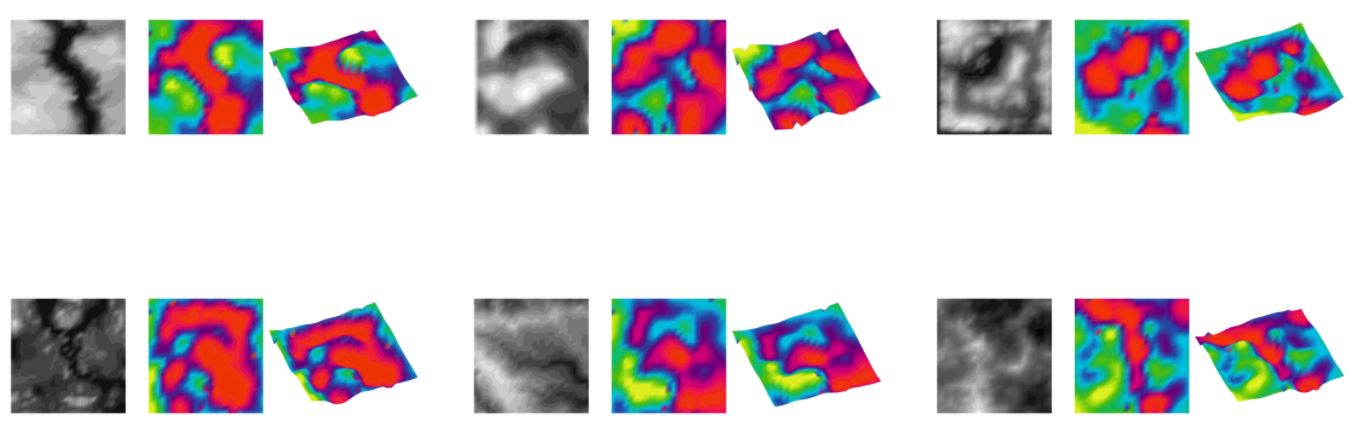
TIME SCALE FOR PREDICTION
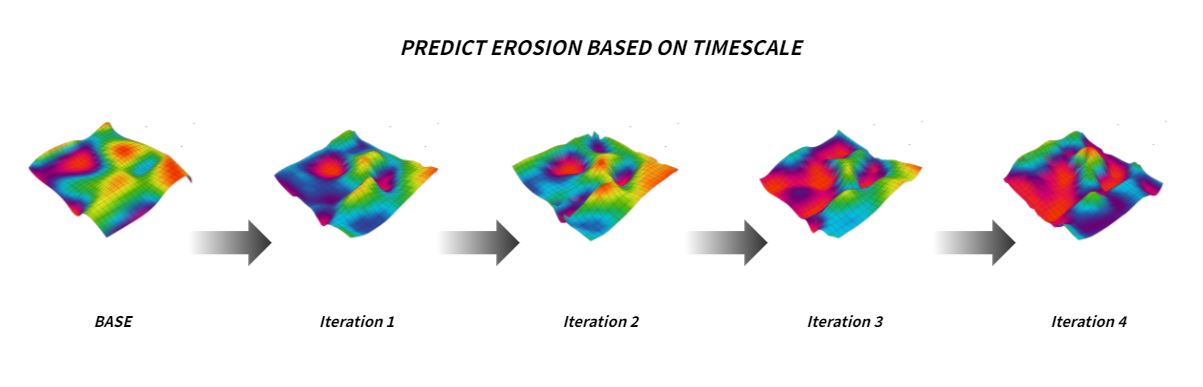
In order to achieve timescale proposal, the project have used different model for each iteration.
TERRAIN PREDICTOR TOOLS
CREATE TOOLS USING HOPS
Now we could create the ML tools that could predict the data of new terrain by using Hops. In this case, the data could be developed into an output of geometry.
Z1 = remapped of initial Z-value
Z2 = remapped of predicted Z-value
t = timescale 0,1,2
ITERATION 01
ITERATION 03
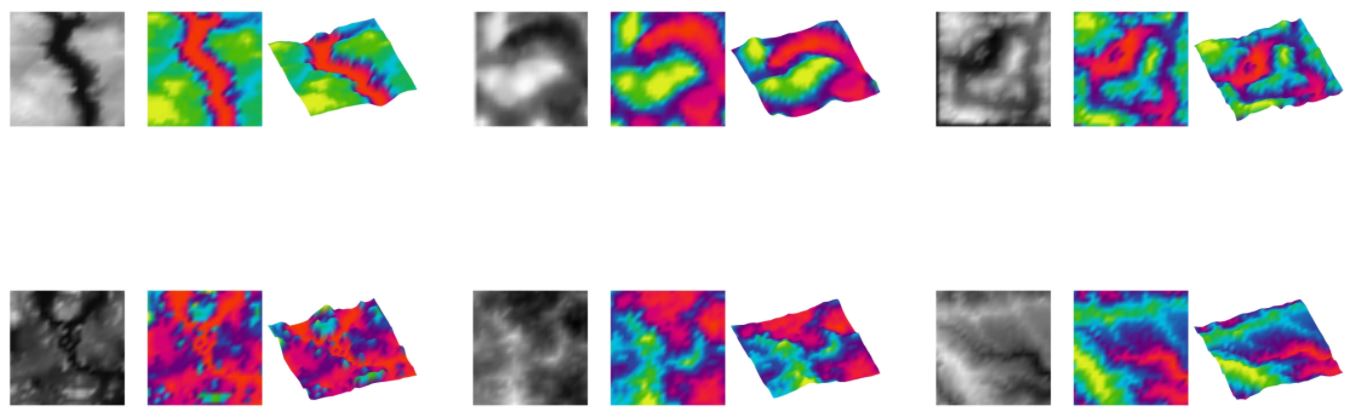
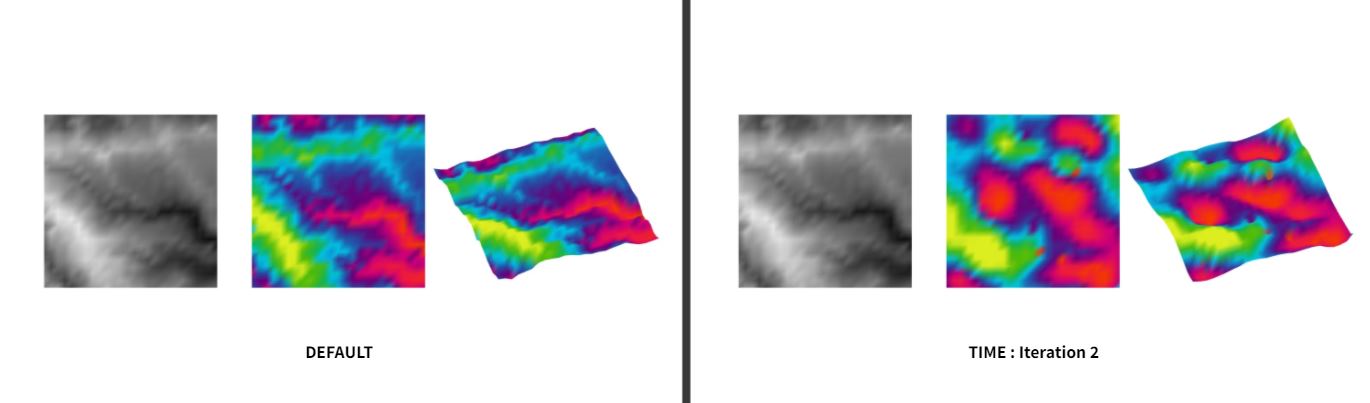
COMPARISON : DEFAULT VS ITERATION
Conclusion
As a conclusion, we found that the model prediction has reduce the accuracy from the simulation when we tested with the realistic dataset. That the model can only work with averagely smooth surfaces for better accuracy. In this sense, in order to developed in the future, the project need to contain other factors including environmental data such as humidity, river speed, river movement in vectors, and force reaction to the terrain to produce more accuracy.