Project Prompt
The course presented the challenge of utilizing a 6-axis robotic arm to 3D print a spatial lattice bridge. This bridge would then be tested in the end for its structural integrity against other groups tasked with the same problem.
Background
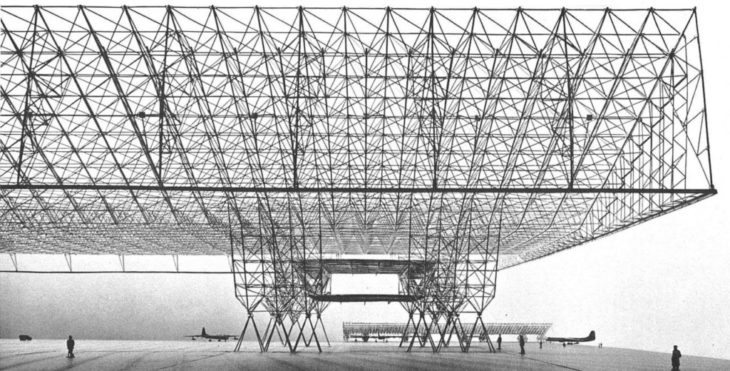
The project’s design draws on inspiration from the spatial lattices pioneered by Konrad Wachsmann in the 1930s and 40s.
These structures developed by Wachsmann used modules of metal lattice pyramids to span over long distances with minimal material and lightweight structures. These innovations were especially crucial in building typologies such as airplane hangers, where touching down with columns was not an option.
Setup
- Robot – ABB IRB-40
- End attachment – PLA (Polylactic Acid) Filament extruder controlled by an Arduino Mega based on an open source Reprap framework developed by Eduardo Chamorro Martin.
Initial Steps
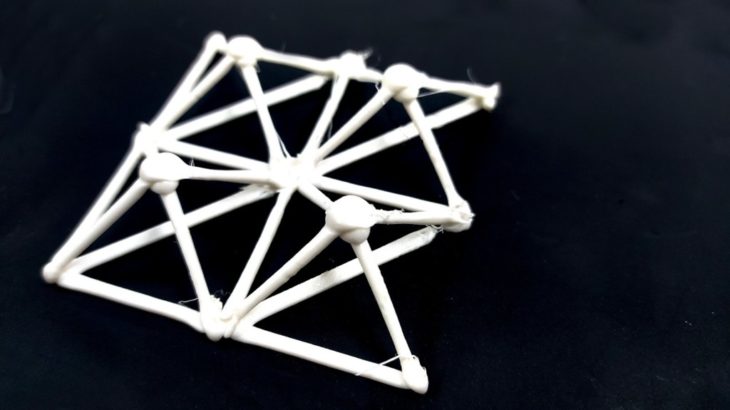
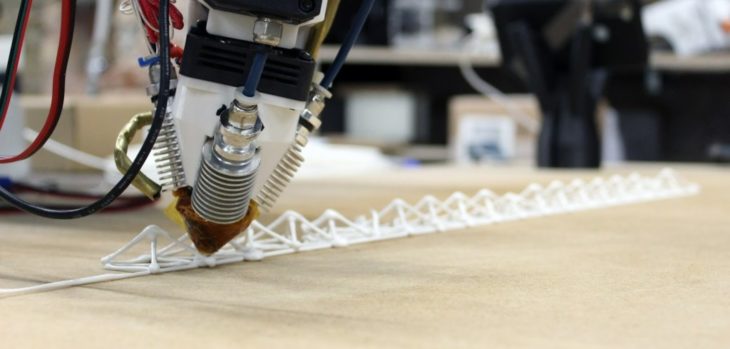
The first aim was to see if a single pyramid could be printed. This would then become the single unit to the structure. Establishing the right timings for diagonal braces and the connecting nodes was a matter of trial and error.

One of the main challenges was making sure that the PLA would dry at the right time – slow movement of the nozzle would deposit too much material, while fast movement would spread the braces too thin or not anchor the node corners to the work surface or previously printed material.
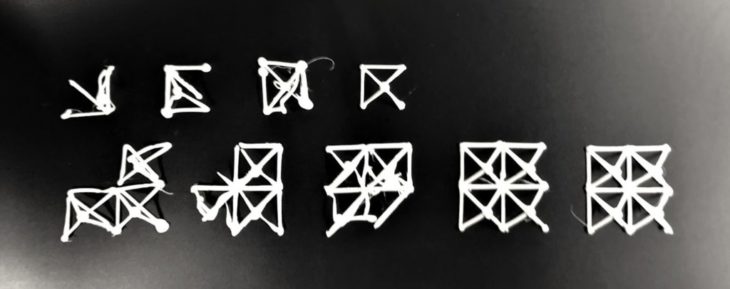
The Comprehensive testing to achieve the four pyramid module
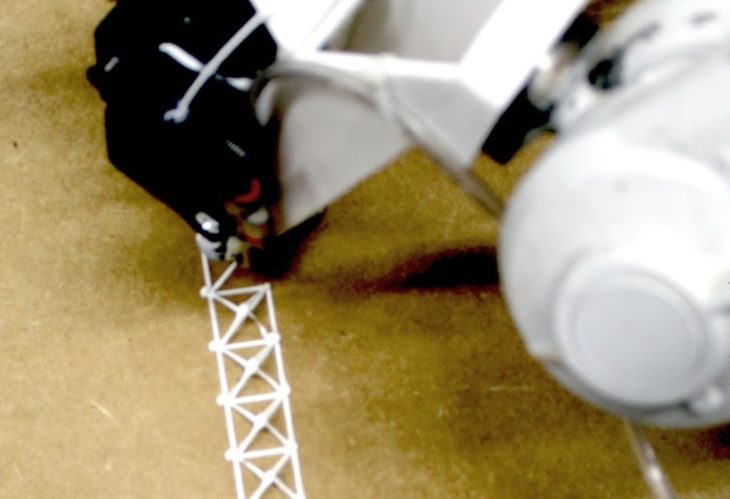
An especially challenging aspect of the design was fine-tuning the apex of the pyramid. Timing the extruder to stop, wait, and cool was crucial at this moment – if the material cooled too much it would stick to the tip and drag along the rest of the toolpath, if the wait time was too short, the material would not be hard enough to support itself.
Final Prototype
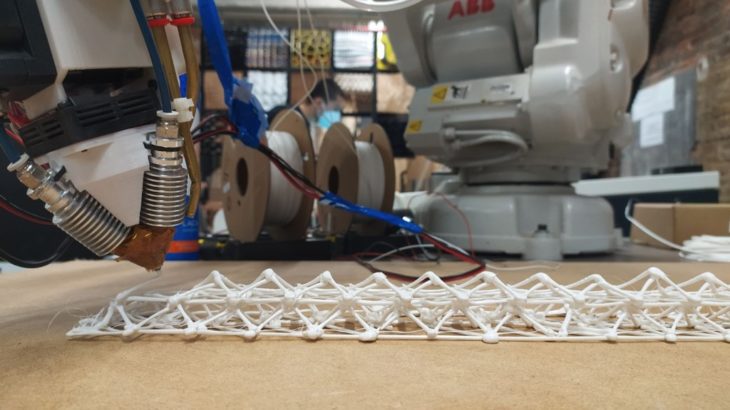
The transition from a single unit to the whole design meant that the accumulated errors throughout the 500 mm print area resulted in deviations that had to be corrected for. Printing the second layer of the modules on top presented new challenges of alignment with the existing modules. Likewise with the cross bracings on the third layer. Higher time delays in the joints and turning points (which meant a bigger deposit or a blob from the extruder) made sure that the contacts between the struts were achieved.
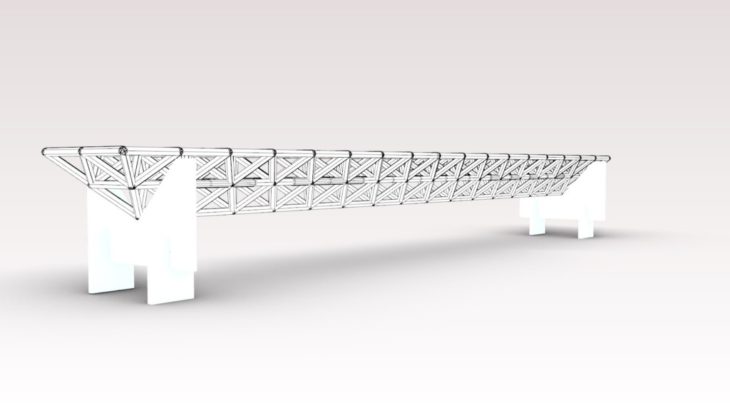
Proposed bridge system
Takeaways
Given the time constraints, there were a number of improvements that could have contributed to the finished product. Calibration was an especially difficult challenge. The earlier mockups of the single modules did a good job at testing the smaller scale geometry, but did not account for the imprecision across longer distances. These deviations across the 0.5m span of the overall prototype became apparent when printing the upper row of the structure and nothing seemed to line up. Efforts were made to correct for these deviations, but ultimately this irregularity had a major impact on the structural integrity of the design.
Toblerone Bridge is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Master in Robotics and Advanced Construction in 2021 by:
Students: Robert Blackburn, Libish Murugesan, Jordi Vilanova
Faculty: Eduardo Chamorro Martin
