**project developed as part of MRAC Software II Seminar 2019 / 2020//
In the context of developing a process for automated data acquisition through a UGV (Unnamed Ground Vehicle) remotely operated via network protocols (SSH), the project has as purpose the object segmentation of buildings interior components automating the data acquisition through setting up an autonomous navigation system for the Turtlebot 3 on a extracted 2D map previously done from the Lidar 360 Laser Distance Sensor LDS-01 with the Simultaneous Localization and Mapping (SLAM) algorithm and equipped with a Depth camera for PointClouds extraction.
OVERVIEW
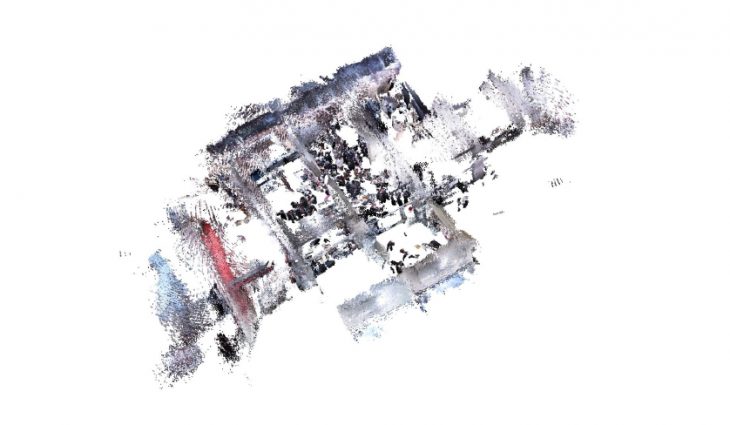
Initially, the project started with the Simultaneous Localization and Mapping (SLAM) with a depth camera ‘Orbbec Astra’ and ROS-wrapped package ‘RTABMAP’ (Real-Time Appearance-Based Mapping) generating a 3D point clouds of the environment to create a 2D occupancy grid map for navigation. The target was to understand and measure the ideal recording speed for the depth camera in a moving position by calculating the data recording velocity.
Later, with the velocity data recorded, complemented with the idea of automatizing the data acquisition process thought the UGV (Turtblebot 3) with a Depth camera, the project set out as an objective to automating the data extraction for object segmentation.

CONTEXT
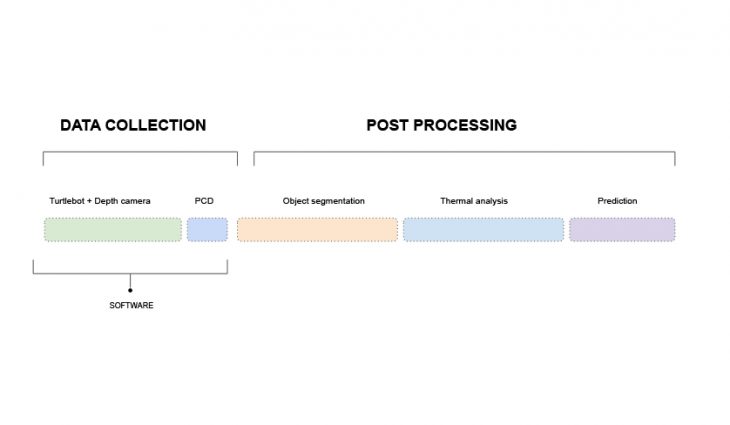
POST PROCESSING
- Object segmentation
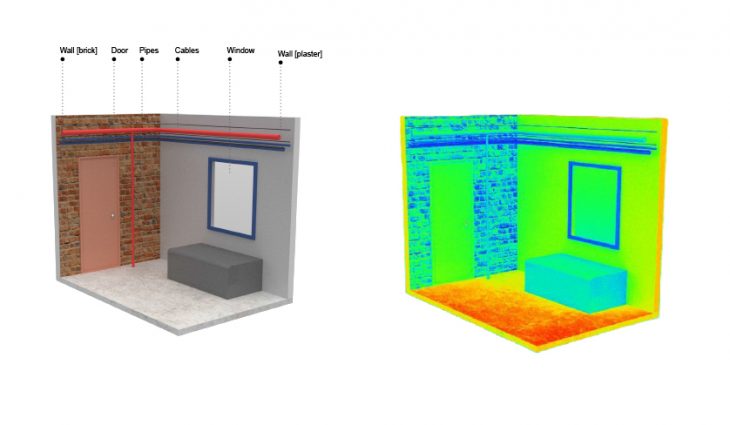
- Thermal analysis
- Prediction (data for thermal comfort improvement)
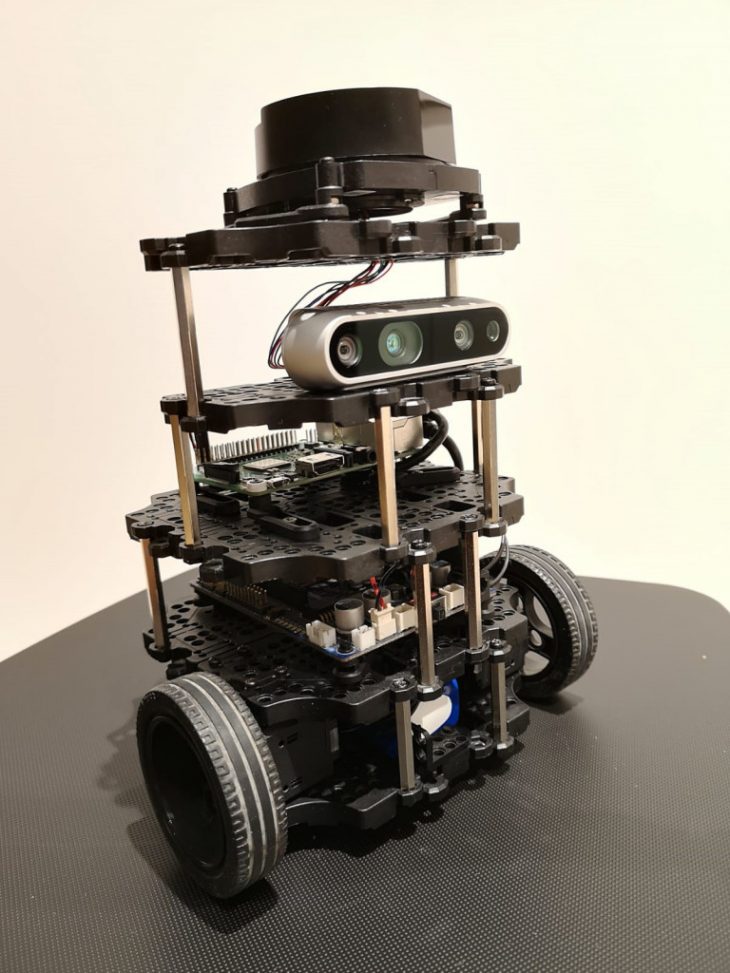
HARDWARE
The Hardware experimentation workflow constitutes:
- Orbbec Astra – depth camera
- Intel RealSense 435I – depth camera
- DSLR – Photogrammetry
- Turtlebot 3 – UGV / Robotis
- Open CR board
- Raspberry Pi 3B+

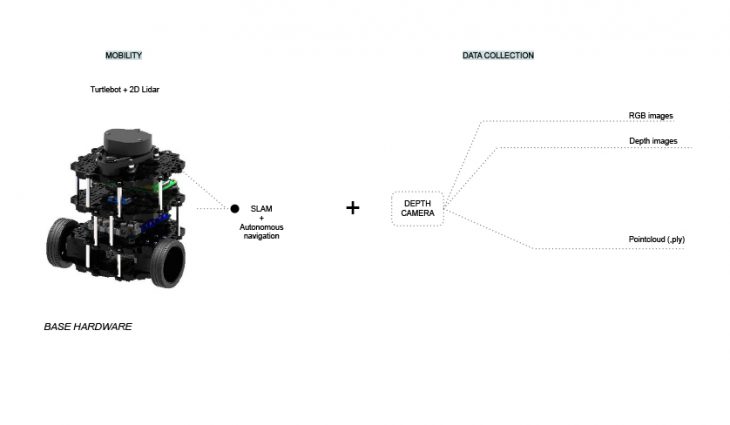
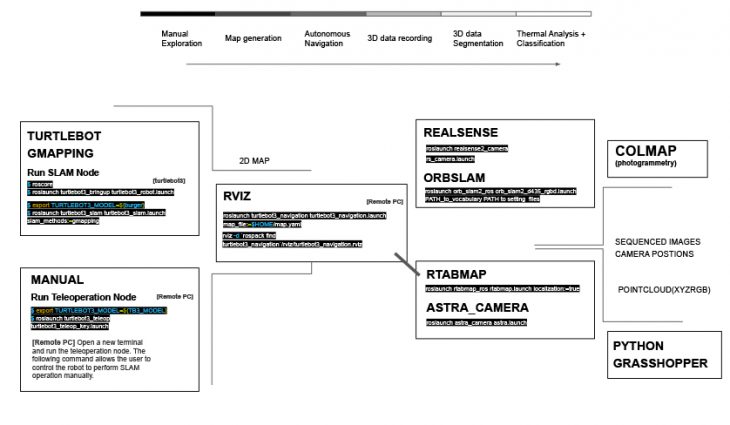
SYSTEM ARCHITECTURE
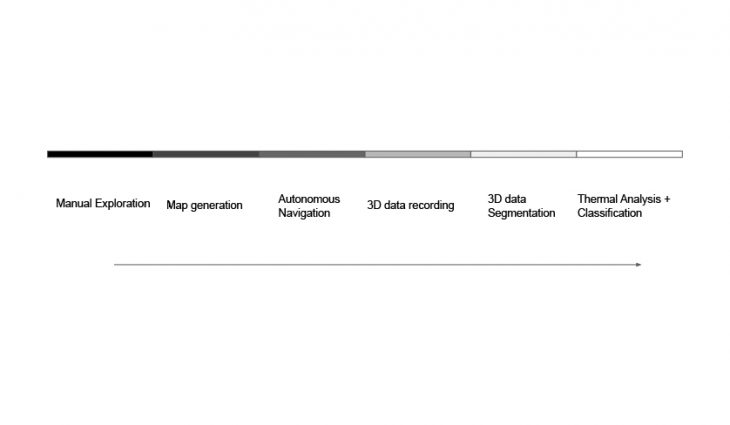
SOFTWARE
The software worflow:
- Gmapping / SLAM
- RTABMAP
- ORB_SLAM2
SCENARIO
Experimentation N1 / Controlled environment
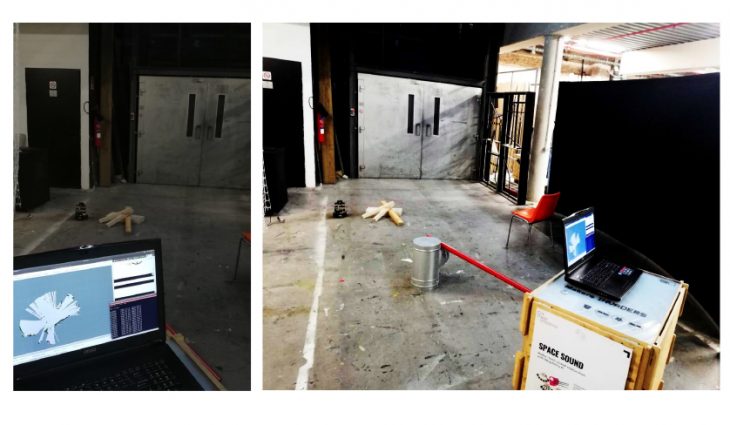
SLAM:

Autonomous navigation
Experimentation N2 / IaaC atelier 1st Floor

POST PROCESSING
Color Segmentation

Segmentation by normals
UGV/PCD acquisition is a project of IaaC, Institute for Advanced Architecture of Catalonia developed in the Masters of Robotics and Advanced Construction in 2019/20 by: Students: Andreea Bunica, Abdullah Sheikh, Jun woo Lee Faculty: Carlos Rizzo, Soroush Garivani