WORKSHOP 2.1: MOSAIC // SHARP EDGE
During this 1 week workshop, MRAC 01 students split into teams to design a mosaic pattern from broken debris of ceramics, assembled by the UR using ROS. The main idea was to reuse discarded material and produce an aesthetically pleasing piece of mosaic through robotic assembly.
MRAC Co-Director Alexandre Dubor lead this workshop along with MRAC faculty and physical computing expert Angel Muñoz assisted by Soroush Garivani.
01 . Inspiration
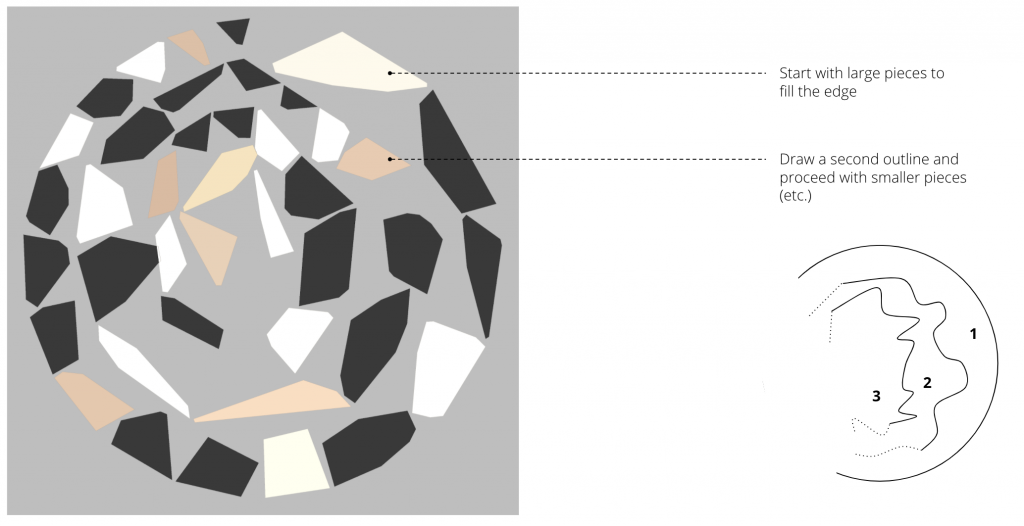
We were inspired by Gaudí’s detail works for Park Güell and Pikionis’ paved path to the acropolis, along with the general construction concept of the masonry wall. The outer layers are well defined and follow a top-down method of an asserted shape, whereas the inside is filled with smaller pieces in – what seems like – a less carefully thought process.
02 . Design Concept
03 . Algorithm
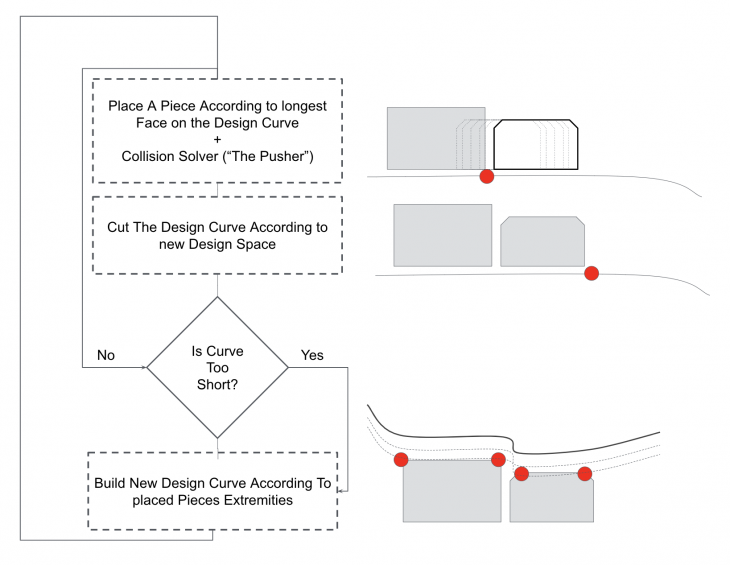


Overall we also envisioned a scenario in which we would populate a surface with this motif to create a pattern of patterns. Since we are able to populate a ruled surface, then the algorithm could also populate in 3D.

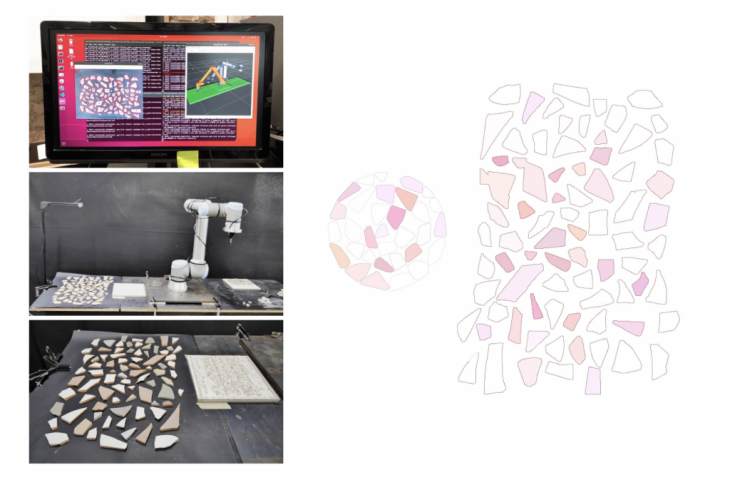
04 . Extracting Contours
As a first step, we extracted contours from an image of broken ceramic pieces to make our mosaic using the OpenCV library and then proceeded to use a camera to detect those same pieces but in real time. The setup was as followed:
WORKSHOP 2.1: MOSAIC // SHARP EDGE is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at the Master in Robotics and Advanced Construction in 2020/2021 by:
Students: Helena Homsi, Shahar Abelson
Faculty: Angel Muñoz, Alexandre Dubor
Faculty Assistant: Soroush Garivani
