Workshop 2.2 /
Multispectral Cognification
– Thermal Point Cloud Aquisition and Assembling
Introduction
Working with sensors namely, thermal, rgb and depth cameras using a variety of ROS packages and tools such as openCV. The focus will be on developing and refining capture parameters for the specific applications that will be deployed on the autonomous vehicles.
Strategies
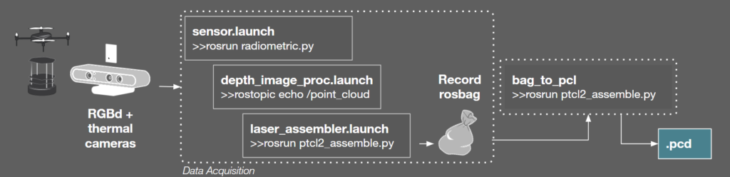
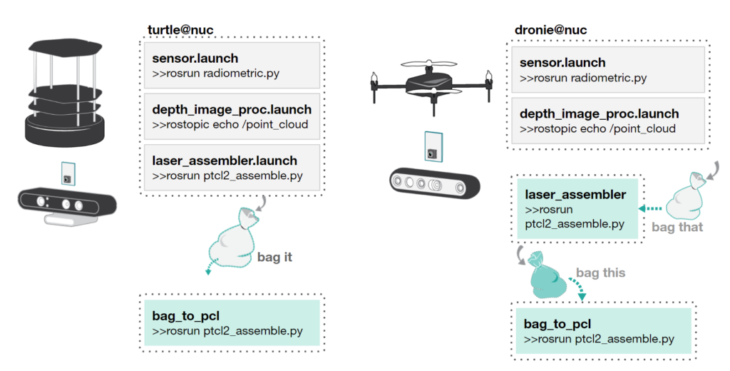
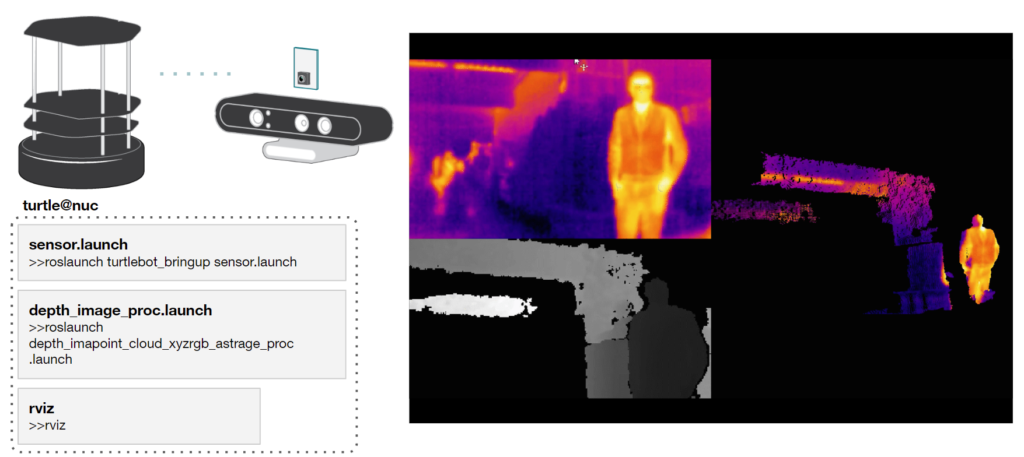
In this process, we use two thermal camera which fixed on one realsense rgbd camera and one astra rgbd camera. The turtlebot carries astra camera, generate point cloud thorough three main ROS algorithm as sensors bringing up, depth image proc and laser assembler.
In order to save time and organise works, turtlebot used for testing different parameters and all configurations will be refered to realsense camera on the drone as final outcome.
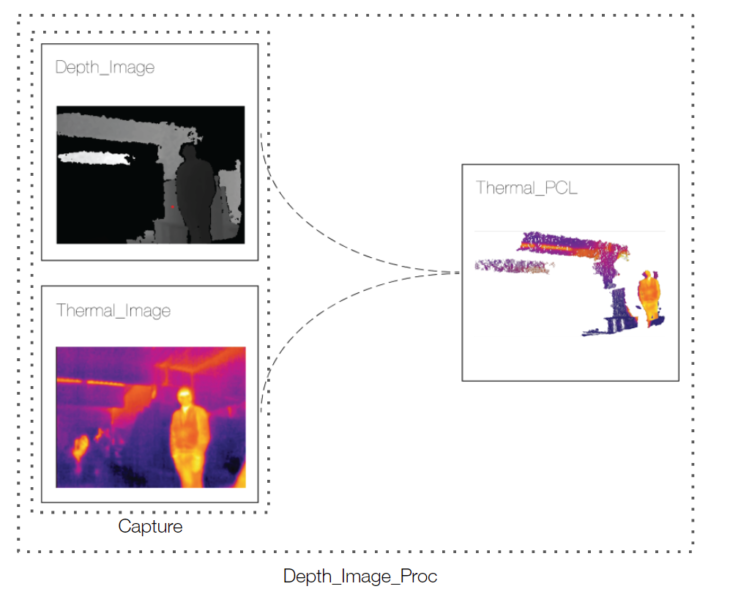
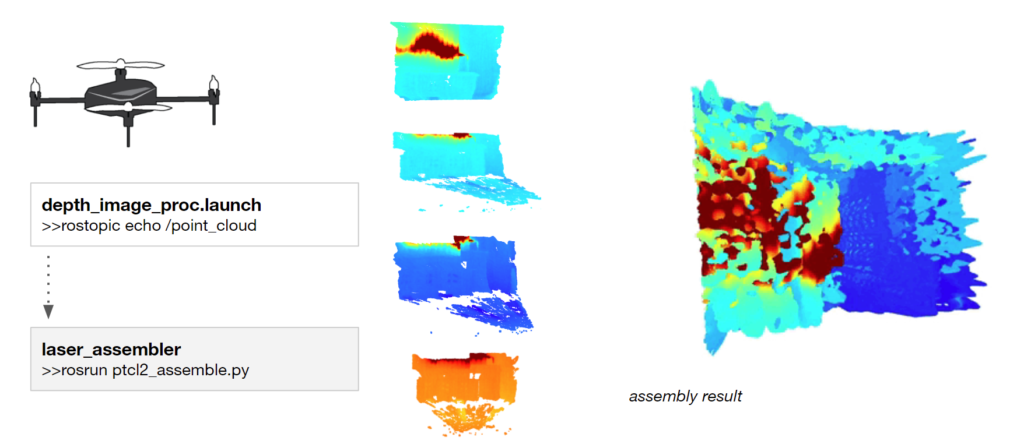
Depth image proc
Functions include creating disparity images and point clouds, as well as registering (reprojecting) a depth image into another camera frame.
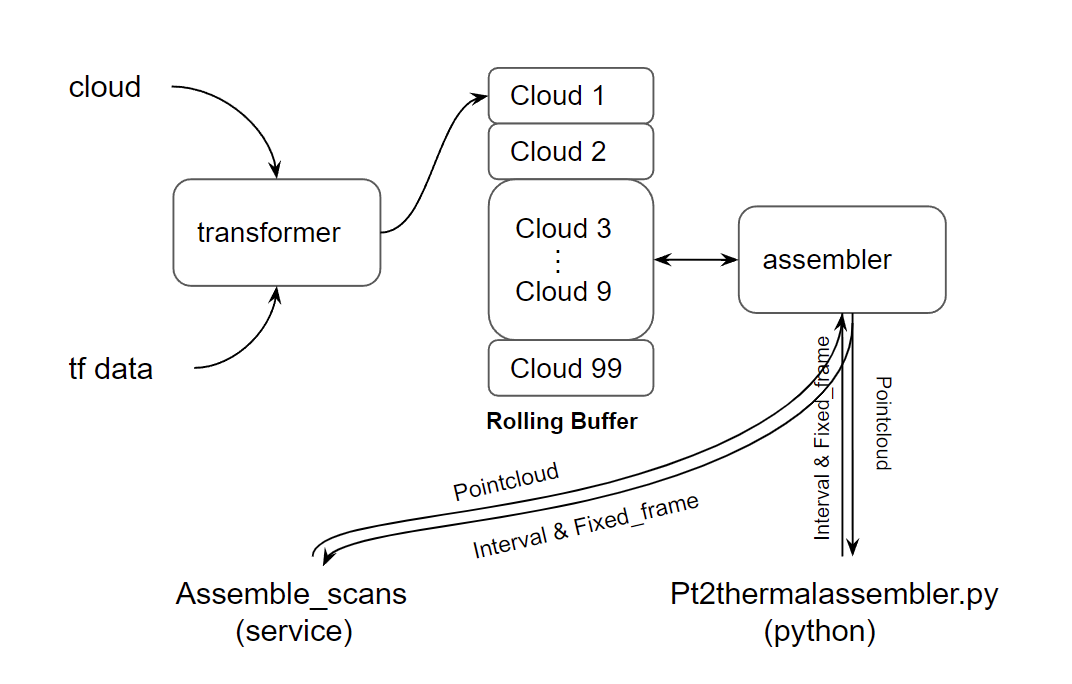
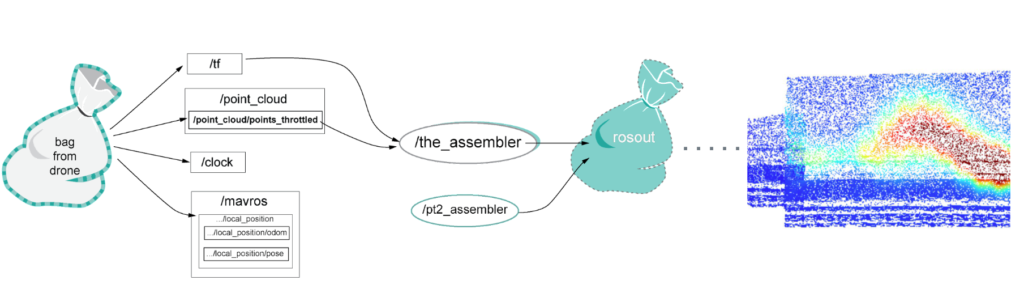
Laser assembler
Laser Rangefinder sensors generally output a stream of scans, where each scan is a set of range readings of detected objects (in polar coordinates) in the plane of the sensor.
This diagram shows how the algorithm provides nodes to assemble point clouds from /Point_Cloud/points messages
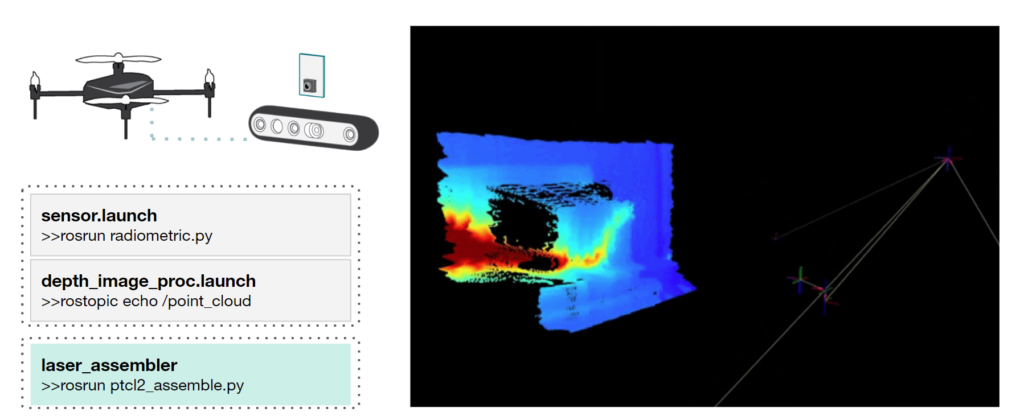
We also explored trying to combine laser assembler while navigating, using gmapping codes as a interface to map and save the environment for the goal of autonomous navigation then remote control of the robot through 2-D navigation goals in rviz.
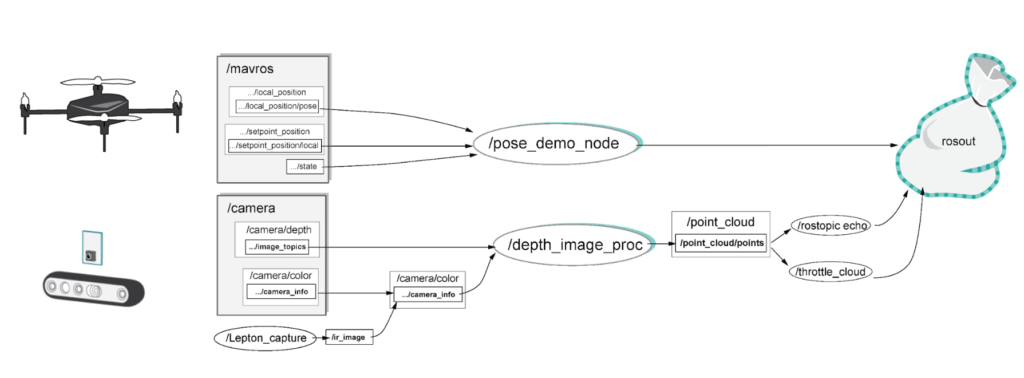
Data Acquisition Drone

Multispectral Cognification –Thermal Point Cloud Aquisition and Assembling is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Masters in Robotics and Advanced Construction, in 2021/2022
by:
Students: Amy Jojo Kim, Mit Patel, Robert Michael Blackburn, Libish Murugesan, Jordi Vilanova, Huanyu Li?
Faculty: Sebastian kay, Ardeshir Talaei, Vincent Huyghe.