Robot command
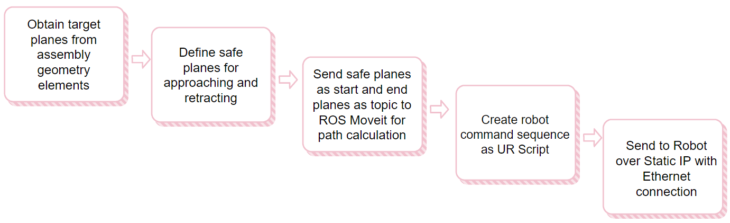
Plane and toolpath definition
From the design phase, we obtain the placing planes
From the robot setup, we have the pickup planes already – the pickup place is always at the same place relative to the robot
Using COMPAS transformations, we define the safe (approach and retract) planes by moving along the respective Z-Axes
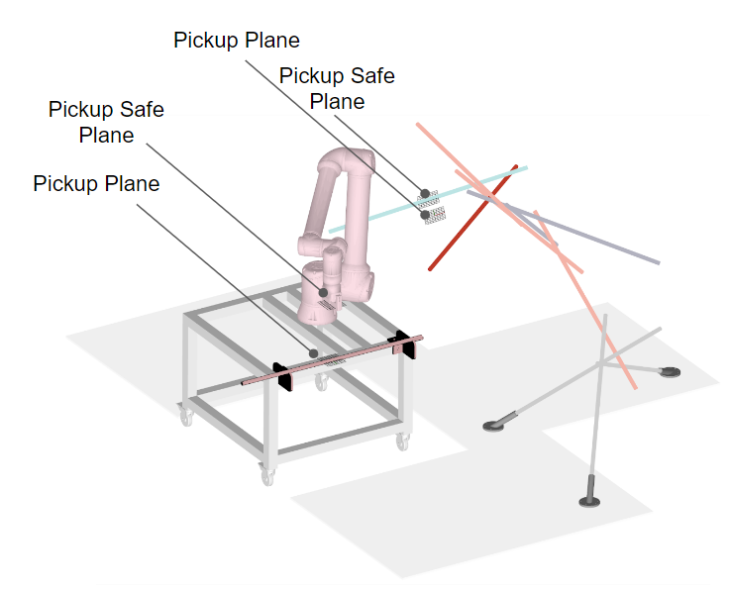
Plane and toolpath definition
We define the following as collision objects:
- The robot table frame
- The sticks in the assembly
- The movable stick attached the the robot gripper
- The robot body
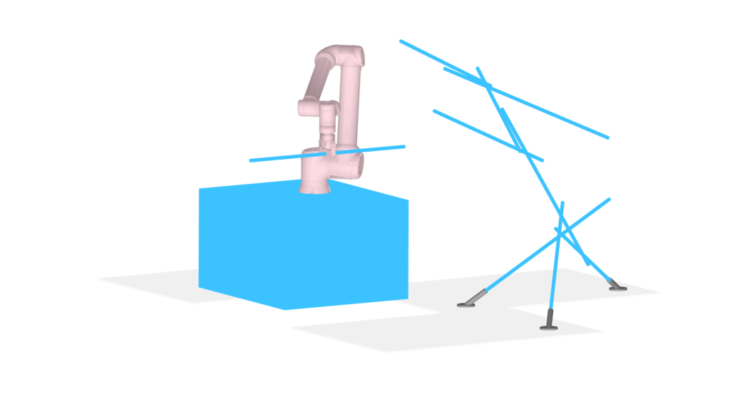
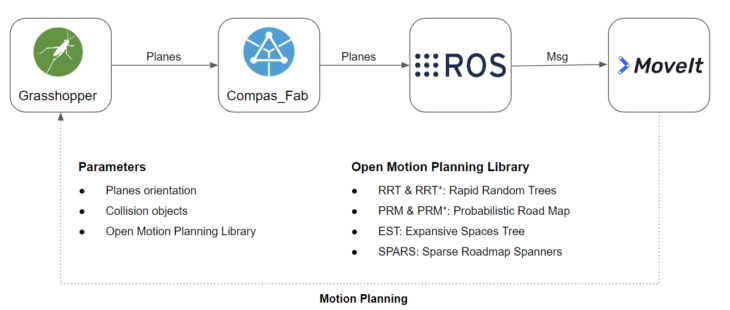
Motion Planning
Simulations
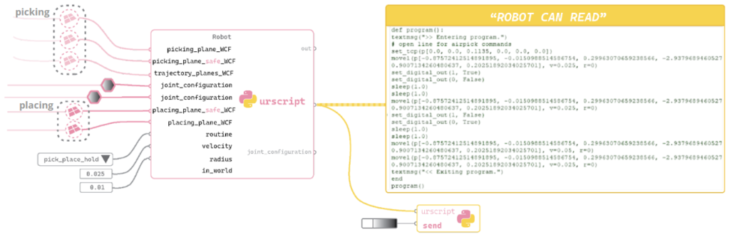
UR Script
Leveraging the ur_fabrication_control library we are able to translate the Target Frames, IO controls and robot parameters into UR Script understandable by the robot.
Decoded Disorder is a project of IAAC, Institute for Advanced Architecture of Catalonia developed at Masters in Robotics and Advanced Construction, in 2021/2022
by:
Students: Alfred Bowles, Vincent Verster…
Faculty: Daniela Mitterberger, Lidia Atanasova, Kathrin Dörfler
Assistant faculty: Daniil Koshelyuk